
| 名称 |
MIRS2204 システム提案書 |
| 番号 |
MIRS2204-DSGN-0001 |
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2022.07.29 |
林瑞己 |
香川先生 |
第2版 |
目次
1.背景
-
MIRSを製作するうえで身近に感じている問題や不満を解決したいと考えた。
大型ショッピングモールを利用するときに
・荷物を長時間持つのがつらい
・重い荷物をもつのがつらい
・両手をあけたい
・おしゃれも楽しみたい
といった問題が挙げれる。
私たちはこの問題を解決するロボットを製作しようと考えた。
2.プロジェクトテーマ
-
Fig.1 ロゴ
プロジェクトテーマ 「よりよいショッピング体験の提供」
プロジェクト名 KOZUTUMI Project
このプロジェクト名は製作するロボット「KOZUTUMI」の名前に由来している。また、プロジェクトロゴは「KOZUTUMI」が荷物を包む姿を表している。
本プロジェクトは以下の想定されるユーザーを「KOZUTUMI」によって手助けし、ロボットと共存する未来の体験を提供することが目的である。
想定されるユーザー
・滞在時間が長い人(大型ショッピングモールに体験やイベントを求めに来た人)
・手が中々離せない人(子供連れ)
・重いものが運べないひと(高齢者や足が不自由な方など)
3.製品コンセプト
-
「KOZUTUMI」は荷物を持ちユーザーを追従することでプロジェクトテーマを実現し、親しみやすいデザインにすることでユーザーがロボットを身近に感じやすくロボット
と人間の共存を製品コンセプトとしている。
特徴
「KOZUTUMI」が荷物をつつみユーザーを追従する。
4.主な機能
-
・ユーザーに追従する
・荷物を格納する(耐荷重:30kg)
・荷物の落下、盗難の通知
・広告掲示
・店内案内
Fig.2に動作概要を示す。

Fig.2 動作概要
5.外観イメージ
-
外観イメージをfig.3、簡易的な機構イメージをFig.4に示す。

Fig.3 外観
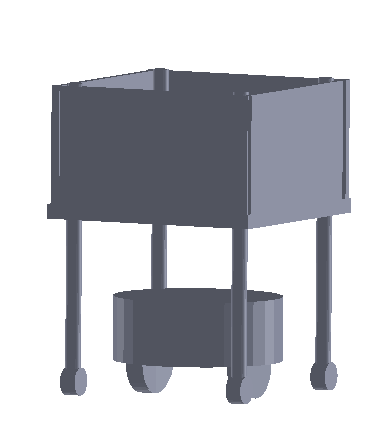
Fig.4 機構イメージ
・ロボット上部:荷物を入れるスペース
・ロボット中部:周囲を検査するセンサの取り付け
・ロボット下部:走行系として標準機の取り付け
6.開発項目
-
重要度A
追従機能
〇 赤外線センサ
〇 同一人物かどうかの判定
安全機能
〇 壁、人に衝突する前に停止
〇 緊急停止機能
耐荷重
〇 30kgに達しても変わらず動作する
重要度B
落下物の通知
〇 重量の検知
〇 落下したかどうかの判定
長距離の帰還機能
〇 ライントレースなどを用いて自己位置推定、規定の位置まで自律走行を実現
重要度C
広告
案内
〇 アプリを作成
7.主要な購入物品
-
Table.1 購入物品一覧
| 名称 |
用途 |
予算 |
| 距離センサ |
追従のため(赤外線のものを検討) |
2000円 |
| 超音波センサ |
衝突回避のため(複数仕様) |
4000円 |
| ロードセル |
荷重測定および落下判定のため |
1200円 |
| メタルミニポール |
高さ調整のため |
1000円 |
| 風呂敷 |
外装に使用するため |
5000円 |
| スポンジ棒 |
クッション材として使用 |
2000円 |
計:15200円
残り:14800円
その他付け足す機能に沿って購入
MIRS DATABASE