
- プレゼンは時間が12分に短縮された影響もあり、本番は時間をオーバーした。
- 機体の説明を多くしてテーマの説明は少なめにすることが必要だと思った。
- 発表でこのプロジェクトを考えた背景は言ったが、それだけでは伝わらないと考えポスターを用いて、より詳しく丁寧に来場者に説明することができたと思う。
- 展示会では体験コーナーを設けた。幅広い年齢層の方々が体験をしてくれた。ブース展示中に機体が止まることなく正常に動作してくれたため、とても良い成果が出せたと思う。
- 展示会での反省点として、体験において一度に複数人ではなく一人に対して説明を行っていたため効率が悪くなってしまった。改善案を考えていきたい。
-
MIRS2203は、メカニクスよりソフトを重視したテーマとしたので、シンプルな機構の設計となりました。しかし、機体の完成が1カ月ほど遅れてしまいました。特に、カメラユニットの遅れが目立ちました。
タイヤの更新を行いましたが、ねじがボディに干渉していたため、切断を行いました。また、簡易アームユニットとカメラユニット等のサーボによる可動部の接続が緩く、本番数日前に改良することとなりました。
外装はイメージイラスト通りのものができたと思います。 - 開発後半は電力不足という問題に悩まされ、なかなか動作が安定せず統合を大幅に遅らせてしまったため、多くの反省がある。ほかにもエンコーダの磁器センサが原因でエンコーダの値が読めなかったり、シールドの接触不良によりサーボモータが動作しなかったりと多くの問題があった。 詳細設計の段階でこれらの問題を予測し対策したり、単体試験をもっとしっかりやっていたりすれば統合の際に遅れが出なかったと思われる。 今回はこれらの問題が統合時点で判明したため、全体に大きな影響が出てしまった。特にソフトはある程度実機がないと動作チェックができないため、ここに大きな影響が出てしまい遅れへとつながってしまった。 余裕を持った開発を進めていくうえで設計や試験など早い段階で問題をつぶすことの重要性について痛感した。
-
RAPTAを作る上で作業の配分がソフトに多くかかっていたため、全体の開発にかかる工数は大きかった。当初からの懸念点であったラズパイの性能不足、電源不足問題は後半にかけて少しずつ響いていたが当日までに対策を考え施行することが出来た。
作業分配は以下の通りである。
清水 : 走行関係、ドットマトリクス、映像通信のプログラムを主に担当した。
吉貞 : メイン、通信関係、入力関係、サーボのプログラムを主に担当した。
入力、通信、走行は特に工数がかかった。 後半はバグが多く、デバッグに多くの時間を必要とした。結果としてエレキの電源不足が原因でしばらく同じような症状に悩まされていた事が工数の増加につながった。 性能不足に着目していた事で実機の問題であることに気づけなかったことは反省するべきだと思う。 発表会当日までに実装したい機能をすべて実装することが出来たことは良かった。
1.はじめに
本ドキュメントはMIRS2203における開発完了報告書である。
完成した機体を以下に示す。

fig.1 完成機体
2.発表会・展示会
発表会における結果は以下の通りである。
-
発表会(得票) 第2位
他班の結果との比較を以下に示す。(授業資料より引用)
| プロジェクト名 | 得票数 | 得票率 | 順位 | |
|---|---|---|---|---|
| MIRS2201 | としょかえる | 9 | 5.3% | 5位 |
| MIRS2202 | なすびproject | 92 | 54.8% | 1位 |
| MIRS2203 | RAPTAプロジェクト | 30 | 17.9% | 2位 |
| MIRS2204 | KOZUTSUMI | 21 | 12.5% | 3位 |
| MIRS2205 | てんこっこ | 16 | 9.5% | 4位 |

fig.2 技術賞
発表会
プレゼン発表について振り返る。
展示会
展示会について振り返る。
3.プロジェクトマネジメント分析
基本設計の時点で予定していた開発スケジュールをfig.3に、実際の開発スケジュールをfig.4に示す。 また、各班員の作業時間を円グラフにし、以下に示す。
fig.2 基本設計時点の開発スケジュール
fig.3 実際の開発スケジュール
ガントチャートの黒い部分が想定より遅れが多く出た部分である。
フォトリフレクタの開発を先に行い、デバッグをする予定だったが発注の遅れや、組込中の破損によって開発が行えなくなったことが原因である。
3Dプリンタの遅れでは、設計のミスによって発表会ギリギリまでパーツの印刷を行っていた。
ドットマトリクスはRaspberyPiの仕様で映像処理を行う際にオーディオプログラムの競合によってノイズが乗ってしまう事が判明するまで時間がかかった事によって遅れが発生した。
全体としては1~2週間程度の遅れとなり、調整に必要な時間が少なくなってしまった。改善法として、進捗のすり合わせを行うことが必要だと思う。
ガントチャートの紫色の部分は開発が行えなかった部分である。
開発の遅れによって社会実装が出来なかった部分と、細かなバグが主な原因にである。
自動帰還プログラムは安定動作が出来ない点や別のデバッグ作業に時間を要したため実装することが出来なかった。
班全体の作業時間に対する各班員の作業時間の割合を以下に示す。

|

|

|

|

|

|

|

|
全体の作業時間割合を以下に示す。
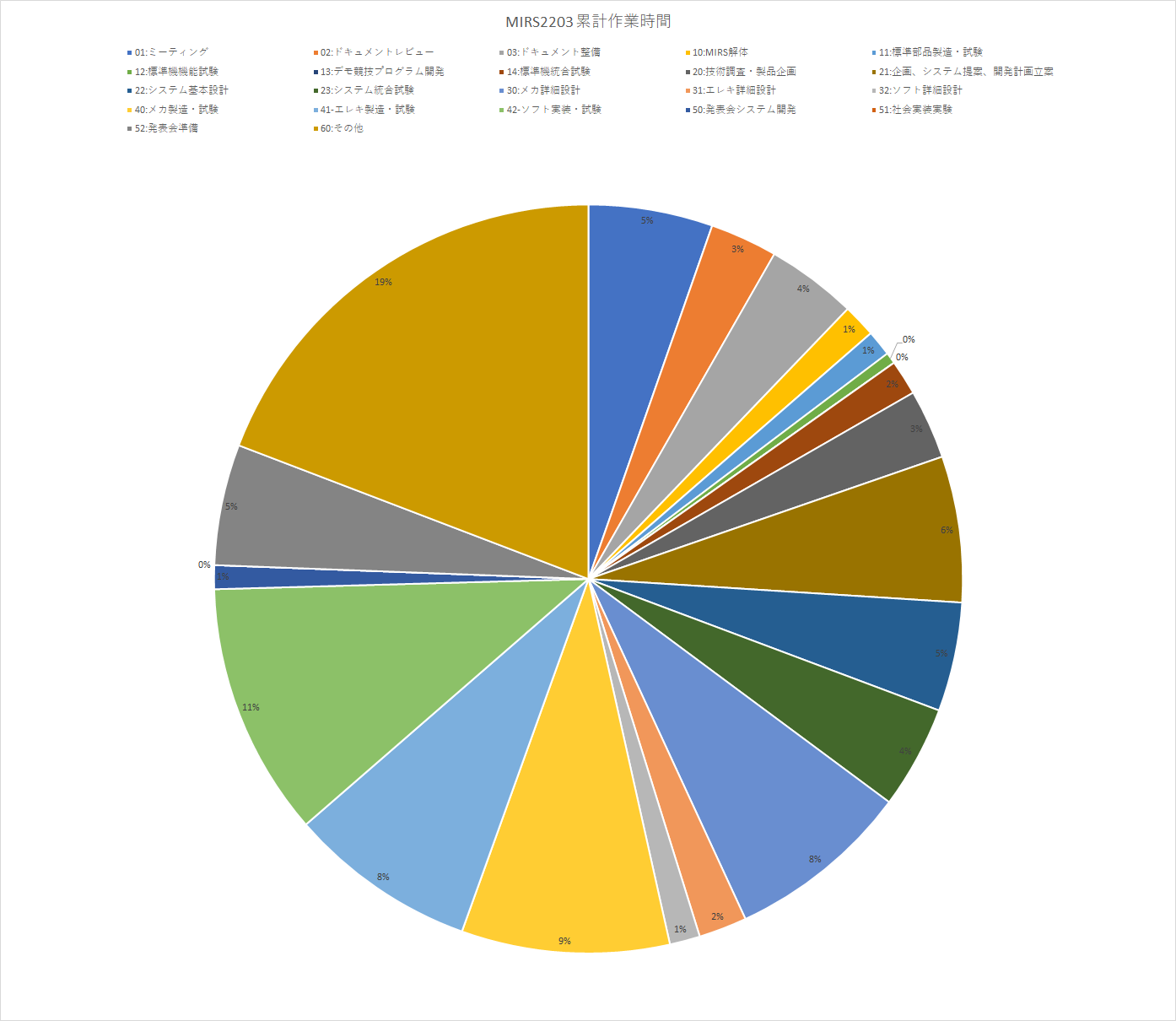
各パートの作業割合を以下に示す。
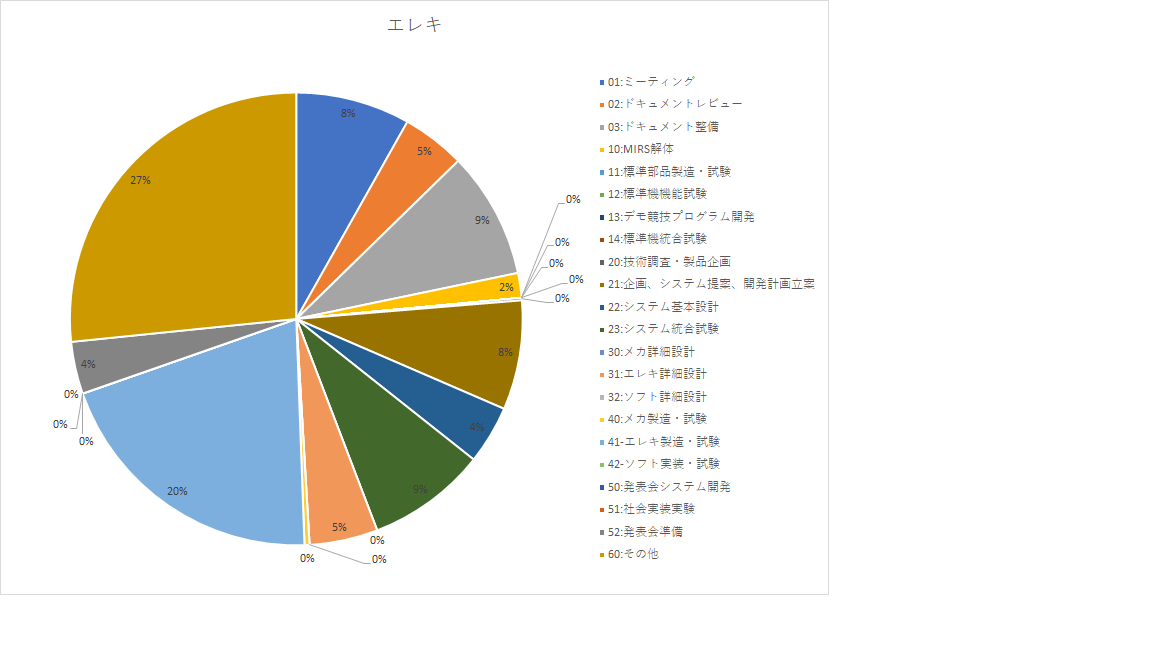
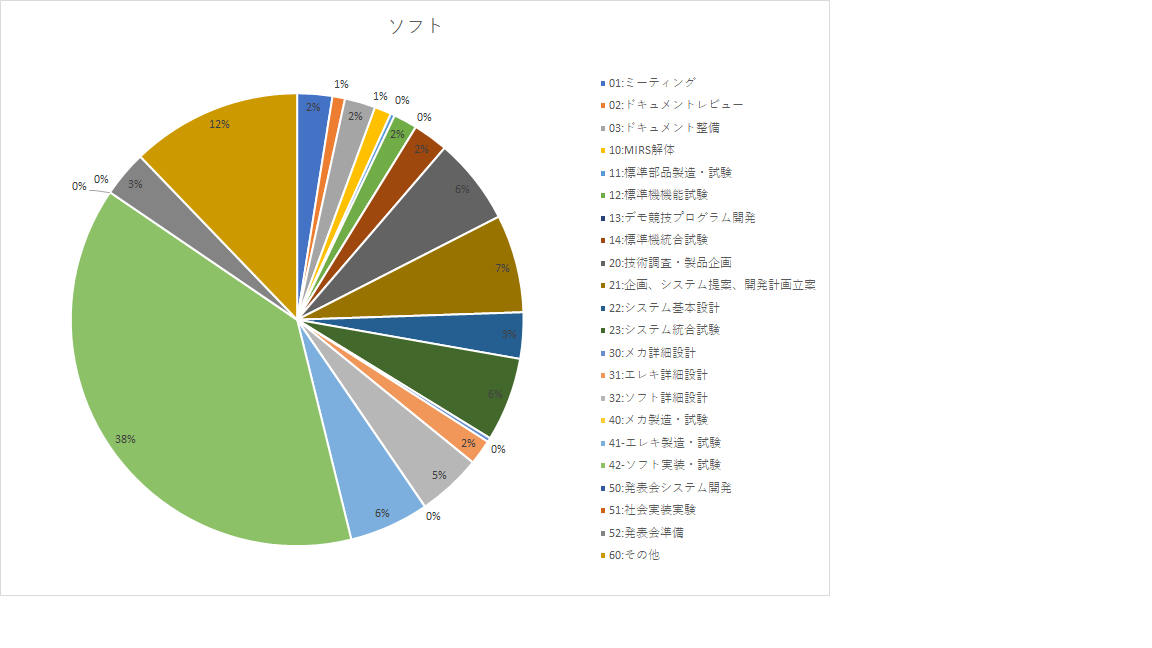
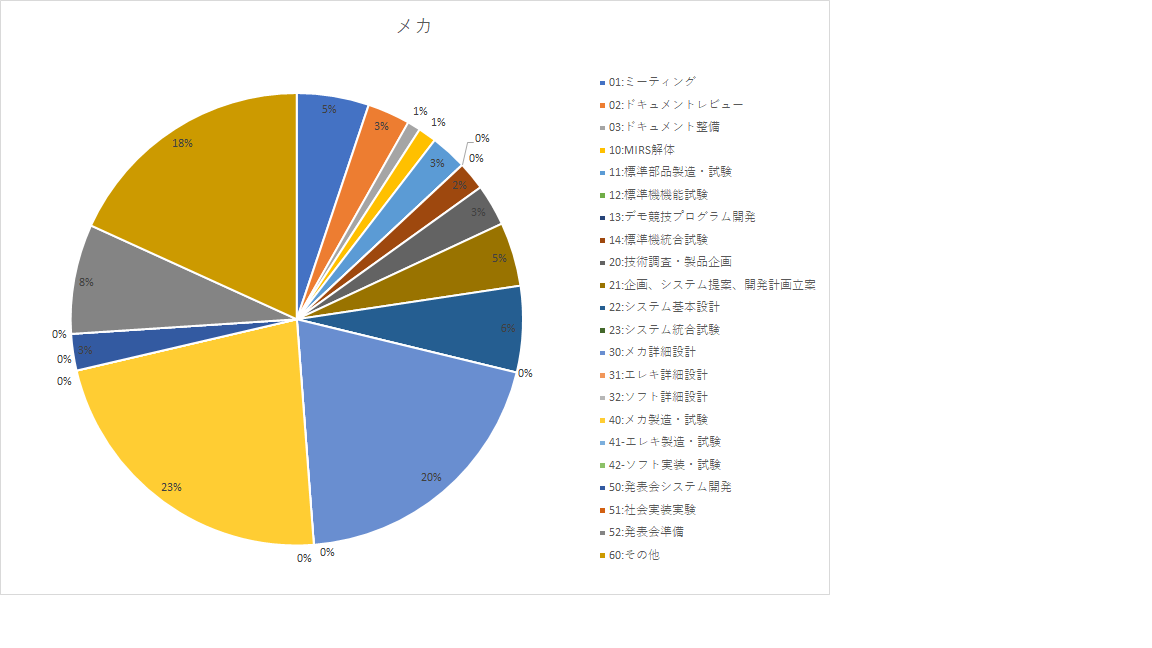
パートごとの総括を以下にまとめた。
4.全体総括
全体として約1週間程度の遅れが発生したが、班員各員の努力もあり、大きな問題は起きずに機体を完成させることができた。PM、TLはもちろんのこと、彼らが割り振ったタスクを班員各々がしっかりと行えたからこそであると思われる。 今プロジェクトは全体的にソフトウェアに重点を置き、メカニクス、エレキに関しては控えめな開発となった。 しかし、メカニクスの設計段階で遅れが生じ、結果的にシステム統合試験まで影響を及ぼしてしまった。また、システム統合試験段階にてデバッグに時間がかかり、社会実装を行うべき週にデバッグを行っていた。これは主に、回路の接触不良やシステム統合による電圧不足等が原因であった。 PMの準備不足により社会実装を行うことができなかったことや、設計書や報告書等の文章作成の遅れが目立ったのも、反省点である。 今プロジェクトは従来のMIRSとは異なり、新しいビジネスモデルとして、ロボットだけでなく運用方法まで含めてのプロジェクトであった。しかしそれら自分たちの行いたいことを発表会にてうまく伝えることができず、総合順位では良い結果を残すことができなかった。しかし、班員が作りたかったものが出来上がり、また技術評価では2位をいただくことができたのは、大変喜ばしいことである。
5.個人の所感
PMとしては、全体的に適切な進行で開発ができましたが、これは班員の優秀さがあってこそだったと思います。文章仕事や本番のプレゼンなどはTLに任せてしまうことも多く、感謝がしきれません。
また、今までソフトを中心に行ってきて、初めてメカニクスの設計を行いました。機械的知識が豊富ではないので比較的簡単な設計にしておいたのは正解だったと思います。しかし簡単な設計にも関わらず機体の完成が遅れてしまったことに関しては、チームメンバーに対して頭が上がりません。 メカニクス班のリーダーとしても活動していましたが、メカ担当の2人に対してはもう少し適切な指導とタスク割り振りができたかな、と反省しています。
工数がかかりやすく、早期開発が必要な作業を主に担当した。特に通信関係のプログラムは標準のライブラリを使用して一から構築したため工数がかかった。入力をコマンドライン上で受け付けていた為同期問題を解決するのに工数が必要だった。今後の展望としてはアプリケーションとして入力方法を変えて移植する方が柔軟性が上がると思う。
後半のデバッグ作業はかなり時間がかかってしまった。単体試験で動いていたものを統合した結果動かない問題が大変だった。同期に問題があると思いこんでしまった事で原因に気づけなかった。これからは広い視野を持って作業していきたいと思う。
去年先輩方のMIRS発表会を見た時に楽しそうだったのでとても楽しみにしていた。そして今年1年MIRSに取り組んだことで新しく学べたことも増えひとつのものをみんなで作り上げる楽しさを知った。自分の作ったパーツなどが機体の一部になって行くのを見ると作業をすることが全然苦ではなかった。 またメカでは設計をすることもできなかった自分に周りの班員が助けてくれてスムーズに作業が進んだのだと思う。しかし自分から仕事を探したつもりではあっても池ノ谷くんに仕事を任せすぎてしまったとも思っているので反省すべき点だと思っているのでもう少し知識を蓄えた上でMIRSに挑むべきだったと後悔してる。
自分はCADの設計を担当したがソリッドワークスを使うのが久しぶりだったし、そもそもロボット自体の設計が初めてだったので、設計に慣れるまでに余分な時間を費やしてしまった。最後には池ノ谷くんに聞きながら設計をしていくにつれて早く作業が進められたと思う。
また、詳細設計書のドキュメント整備をした。ドキュメント整備をすることで自分の機体について詳しく知れたので作業のしがいがあった。
そして、池ノ谷くんが家で作業してくれたり増田さんが設計を助けてくれて機体が何とか間に合ったのはその存在がかなり大きかったと思う。外装でもブースの飾りつけでも一つも妥協せず完成させることができたので良かったと思う。
MIRS全体としては1からのシステム開発を行い他人に評価してもらう貴重な経験だった。 ソフトとしては主に走行、ドットマトリクス、映像音声通信の機能を担当した。はじめの2つはスムーズに開発できたが統合に時間がかかってしまった。残りの一つは既存のソフトフェアを用いたのだが、ここの実装に時間がかかってしまった。 また反省点として音声通信が実装できなかったところにある。この原因として開発、試験、評価、フィードバックのサイクルをこまめに回せなかったところにあると思う。
私はエレキとして、基盤作成や、ケーブル作成を担当しました。基盤配線は豊田が考えてくれたため、とても感謝しています。作業を進めていった中で、小さい基盤に細かい配線をしていたため、集中力はついたかと思います。反省点として、私に電気系の知識があれば、豊田を少しは楽にさせることが出来たと思いました。また、フォトリフレクタ基盤に関して、事前に特性を理解しておけば時間短縮ができたと思いました。1年を通して自分の能力を改めて知ることが出来たので、今後に活かしていきたいです。班員の皆さん、1年間ありがとうございました。
エレキの設計、開発を中心となって行ったがほぼ1人で行なってしまったため細かな設計ミスが多くあった。これらの確認不足によりスムーズな開発が行えなかった。早い段階でできるだけ早く不具合を潰すことが大切だと感じた。 この一年でkicadやblenderなど新しいものにも触れられ、楽しかったため、とても良い経験となった。
MIRSを1年通してやって来てスケジュールが厳しい時期もあったが、とても楽しかった。 自分はエレキとしてやったことは年内で全うした為、年始からはドキュメントや発表に向けて作業することが多くなった。ドキュメント整理やパワポ、Excel等をたくさん扱ったおかげでそれらは上達できたのが、うれしかった。ですが、後期の統合試験や最終調整では自分の非力さ故、PM/TLの指示で動くことしかできなかったことが悔しいです。結果としては、良い機体が完成し達成感もあったが、もう少し自分に能力があればなと痛感した
最初はみんなが思い描いているもの、目的としているものが設計できるのか、しっかり完成するのかとても不安でした。 しかし、自分の持っている知識を生かし、わからないところがあれば仲間と助け合うことで無事に完成し、発表会で一回の不具合もなく走行できたことがうれしいです。まだ、自分では実力不足である部分が多く見つかったので、これを機に自分のことをしっかりと見つめ直してみようと思います。