| 名称 | MIRS2105エレキ基本設計 |
|---|---|
| 番号 | MIRS2105-DSGN-0004 | 現在時刻 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A02 | 2021.10.07 | 植田 花、タン フイ スエン | 青木先生 | 第2版 |
目次
1.はじめに2.担当メンバー
3.基本接続図
4.電源仕様
5.表示部・操作部仕様
6.センサ仕様
7.購入予定物品
8.各パートへのリンク
1.ドキュメント概要
本ドキュメントはPhotoKENプロジェクトに関するエレクトロニクス基本設計についてまとめたものである。
2.担当メンバー
MIRS2105のエレクトロニクス担当メンバーを以下に示す。
植田、タン
3.基本接続図
PhotoKENの基本接続図をfigure1に示す。
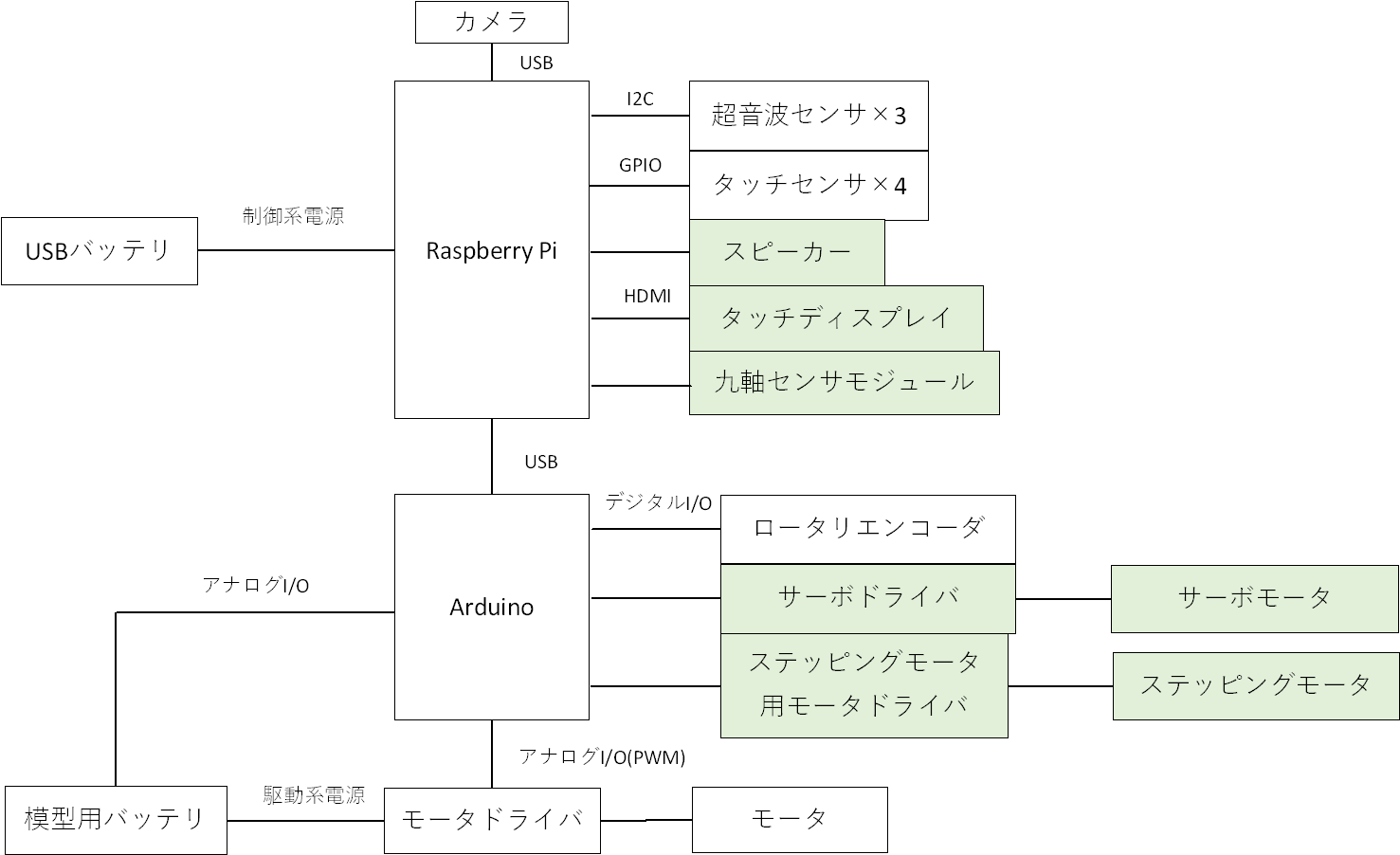
figure1 基本接続図
また、模型用バッテリまわりの電源系統図をfigure2に示す。
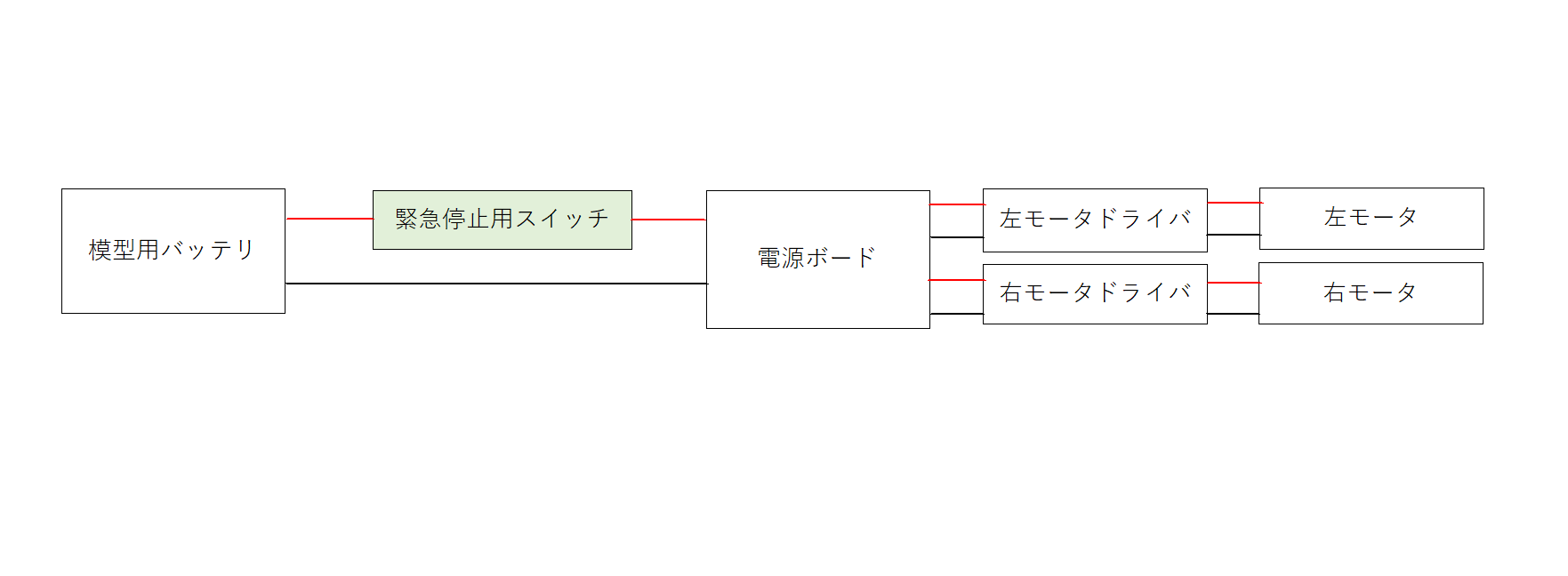
figure2 電源系統図
※figure1、figure2では標準機に新たに加える部品を緑の背景で示している。
4.電源仕様
table1に電源仕様を示す。
table1 電源仕様
| 電源の種類 | 電圧[V] | 供給先 | 供給方法 |
|---|---|---|---|
| モバイルバッテリ | 5V | ラズベリーパイ | USBケーブル |
| モバイルバッテリ | 5V | ディスプレイ | Raspberry Piから給電 |
| 駆動用バッテリ | 7.2V | モータードライバ | 電源ボードを介して給電 |
| サーボモータ用バッテリ | 6V | サーボモータ | 1.5V電池を直列に4本接続 |
5.表示部・操作部仕様
表示部・操作部仕様をtable2に示す。
table2 表示部・操作部仕様
| 種類 | 使用用途 | 備考 |
|---|---|---|
| タッチディスプレイ | MIRS操作のため | |
| 緊急停止スイッチ | 緊急的にロボットの動作を停止させる | 駆動用バッテリーからの出力を切断し、モータの動作を停止させる |
モータの停止は緊急停止スイッチをfigure2のように接続し、模型用バッテリの出力を断つことで行う。これによって緊急停止を実現する。
6.センサ・I/F仕様
table3にセンサI/Fの仕様を示す。
table3 センサI/F仕様
| 種類 | 個数 | 機能 | 接続方法 |
|---|---|---|---|
| 超音波センサ | 1 | 周囲の障害物との距離を把握するため | I2C |
| タッチセンサ | 3 | 衝突の検知、内蔵ゲームを行うため | GPIO |
| タッチディスプレイ | 1 | 内蔵ゲームを行うため | HDMI |
| カメラ | 1 | 画像認識で子供の位置を検知する、写真撮影をするため | USB |
| スピーカー | 1 | 音声案内をするため | 未定 |
タッチセンサとタッチディスプレイについてはどちらか一つの搭載とする可能性がある。
7.購入予定物品
購入予定の物品をtable4に示す。
table4 購入予定物品
| 名称 | 購入目的 | 個数 | 型番 | 製品URL | 1つあたりの税込価格(円) |
|---|---|---|---|---|---|
| サーボドライバ | ジンバル機構作成のため | 1 | |||
| サーボモータ | ジンバル機構作成のため | 1 | |||
| ステッピングモータドライバ | 頭部回転機構作成のため | 1 | |||
| ステッピングモータ | 頭部回転機構作成のため | 1 | |||
| 超小型基本スイッチ SS | 衝突回避機能作成のため | 2 | SS-5GLD2 | https://www.monotaro.com/p/4655/3866/?t.q=ss%205gld | 208 |
| 超音波センサ | 衝突回避機能作成のため | 1 | SRF02 | https://akizukidenshi.com/catalog/g/gM-06685/ | 2,400 |
| 合計金額 | |||||
8.各パートへのリンク
各パートごとの基本設計のリンクを以下に示す
MIRS2105ドキュメント管理台帳へ