| 名称 |
MIRS2002 エレキ詳細設計書 |
| 番号 |
MIRS2002-ELEC-0001 |
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2020.01.10 |
小澤 和成 |
|
初版 |
本ドキュメントはMIRS2002のエレクロトニクスにおいての詳細設計書である。
作成箇所を表1に示す。
表1.作成箇所
| 作成箇所 |
機能 |
標準機からの変更箇所 |
| 電源ボード |
駆動用モータと昇降用モータの電源制御 |
モータへの出力端子を増設 |
| 非常用停止スイッチ |
緊急時の非常停止 |
|
| Arduinoシールド基盤 |
モータの制御 |
ArduinoMEGAに合うように変更 |
システム構成図を図1に示す。
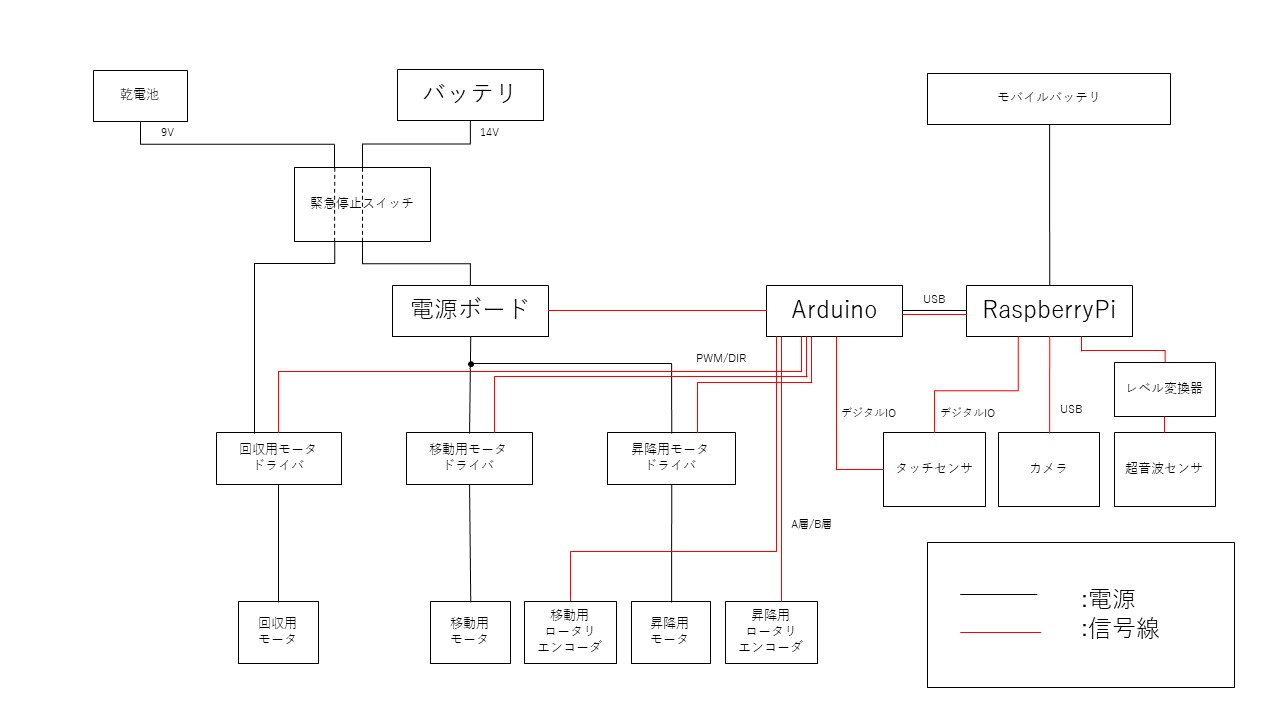
図1 システム構成図
使用する回路の回路図を以下に示す。
電源ボード
電源ボードの回路図を図2に示す。
緊急停止スイッチには9Vの電源と14Vの電源をそれぞれ別々に繋ぐ。出力端子は駆動用、昇降用、回収用のモータでそれぞれ分けるようにする。
緊急停止スイッチへの接続はターミナルブロック2ピンを用いる。
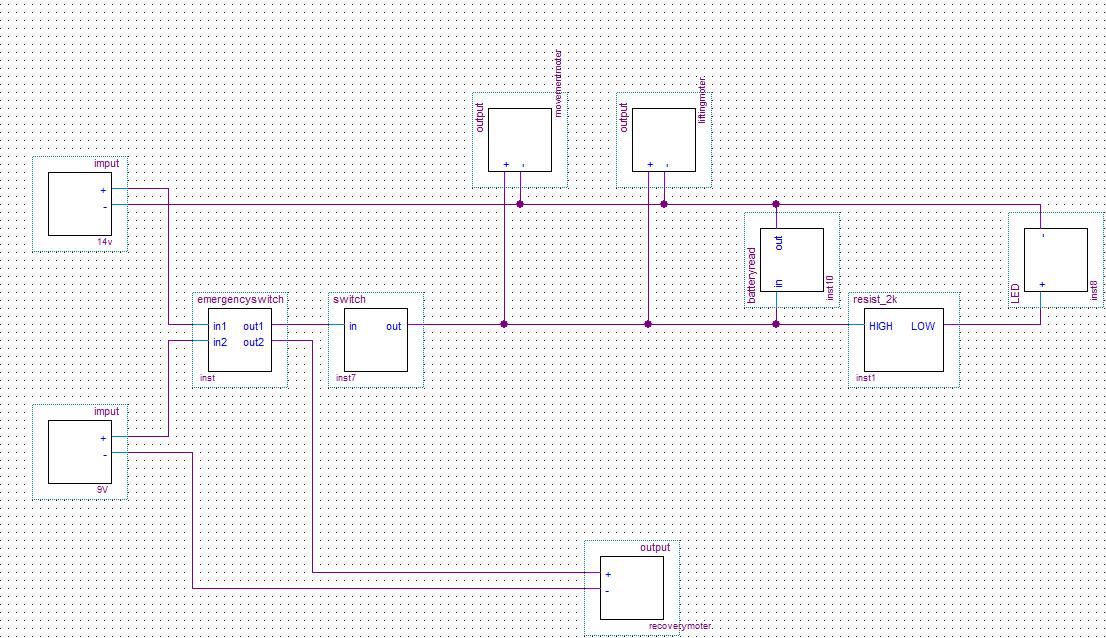
図2 電源ボード回路図
Arduinoシールド基盤
Arduinoシールド基盤の回路図を図3に示す。また、接続デバイスを表2に示す。
ArduinoはAruduinoMEGAに変更するため、接続を合うように変更する。
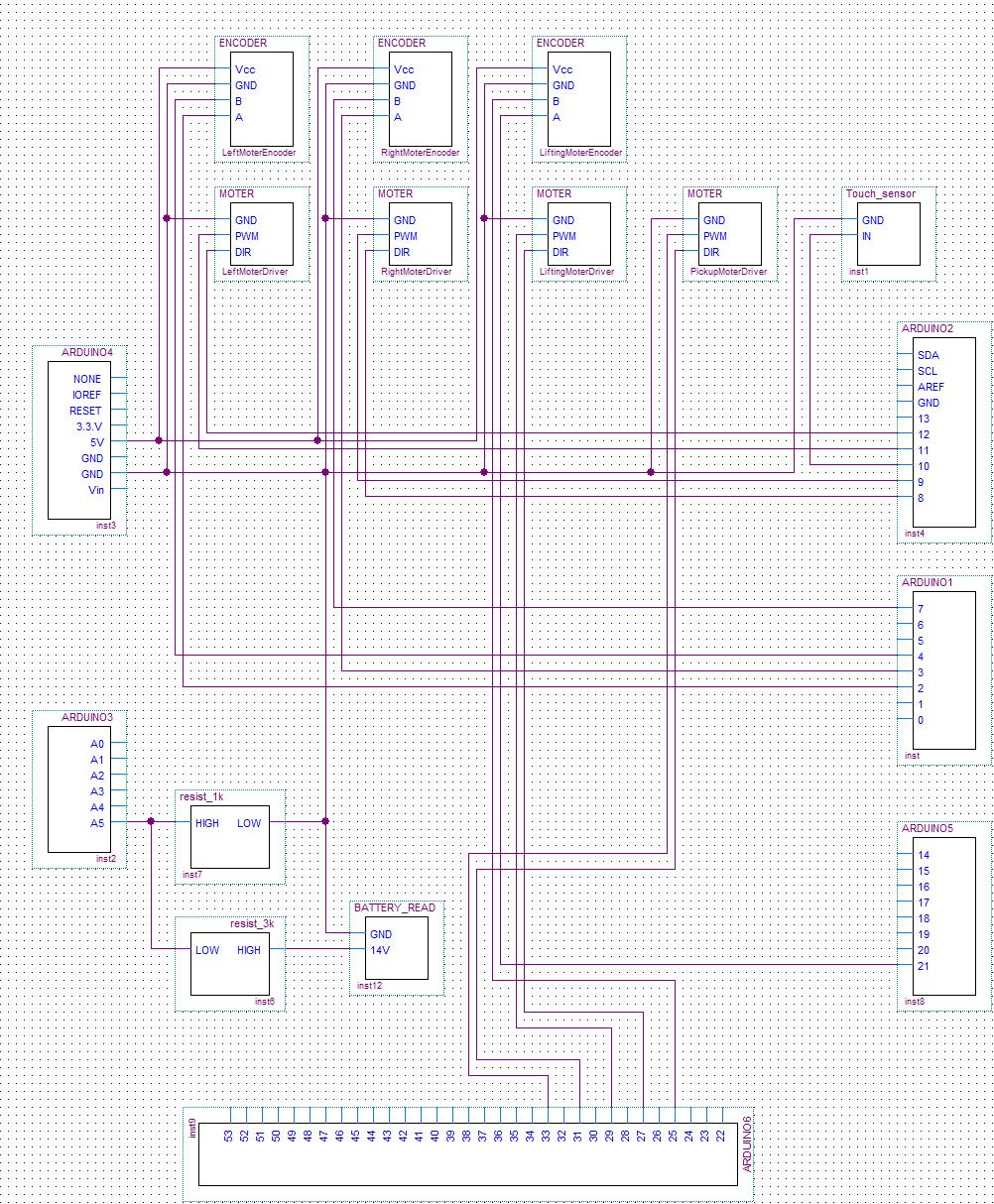
図3 Arduinoシールド基盤回路図
表2.接続デバイス
| ピン番号 |
接続デバイス |
IN/OUT |
| 2 |
駆動用エンコーダ(左)A |
IN |
| 3 |
駆動用エンコーダ(右)A |
IN |
| 4 |
駆動用エンコーダ(左)B |
IN |
| 7 |
駆動用エンコーダ(右)B |
IN |
| 8 |
駆動用モータドライバ(右)DIR |
OUT |
| 9 |
駆動用モータドライバ(右)PWM |
OUT |
| 10 |
タッチセンサ |
IN |
| 11 |
駆動用モータドライバ(左)PWM |
OUT |
| 12 |
駆動用モータドライバ(左)DIR |
OUT |
| 19 |
バッテリ電圧 |
IN |
| 21 |
昇降用エンコーダA |
IN |
| 25 |
昇降用エンコーダB |
IN |
| 27 |
昇降用モータドライバDIR |
OUT |
| 29 |
昇降用モータドライバPWM |
OUT |
| 31 |
回収用モータドライバDIR |
OUT |
| 33 |
回収用モータドライバPWM |
OUT |
RaspberryPiシールド基盤
RaspberryPiシールド基盤の回路図を図4に示す。また、接続デバイスを表3に示す。
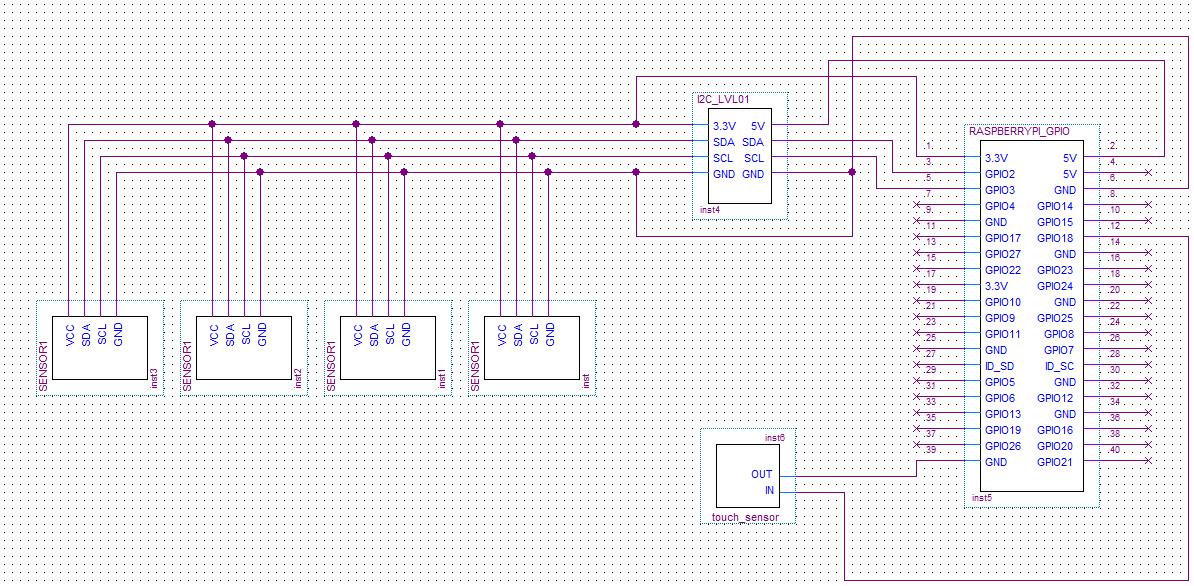
図4 RaspberryPiシールド基盤回路図
表2.接続デバイス
| ピン番号 |
接続デバイス |
IN/OUT |
| 18 |
タッチセンサ |
IN |
購入予定物品を表2に示す。
表2.購入予定物品
| 物品名 |
購入サイト |
型番 |
数量 |
単位 |
単価 |
価格 |
備考 |
| Arduino用ユニバーサル基盤 |
モノタロウ |
UB-ARD02 |
1 |
枚 |
857 |
857 |
Arduino用ユニバーサル基盤リンク |
| タッチセンサ |
|
SS-5GLD |
2 |
個 |
0 |
0 |
在庫部品から使用 |
| 昇降用モータ |
|
LC-578VA |
1 |
個 |
0 |
0 |
在庫部品から使用 |
| 昇降用エンコーダ |
|
E6A2-CW3C |
1 |
個 |
0 |
0 |
在庫部品から使用 |
| 回収用モータ |
|
RS-385PH-2465 |
1 |
個 |
0 |
0 |
在庫部品から使用 |
| モータドライバ |
|
MD10C |
2 |
個 |
0 |
0 |
在庫部品から使用 |
| ターミナルブロック |
|
|
9 |
個 |
0 |
0 |
在庫部品から使用 |