fig.1 全体完成図
| 名称 | MIRS1905開発完了報告書 |
|---|---|
| 番号 | MIRS1905-REPT-0002 |
| 版数 | 最終更新日 | 作成者 | 承認者 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2020/2/14 | 赤池寛太 | 初版 |
| 機能 | 評価 | 完成度(%) |
|---|---|---|
| 昇降機構 | 多少のがたつきが残るが機能としては問題ない | 100 |
| 画像処理 | WEBとの連携を行うとリアルタイムの認識ができない | 75 |
| WEB上への表示 | 画像処理との連携が行えなかった | 75 |
| ライントレース | センサーの不具合で実装できなかった | 30 |
| 状態表示LED | 走行表示と連携して表示することができた | 100 |
| 緊急停止 | 超音波による停止、スイッチによる停止の両方が実装できた | 100 |
| プロジェクト | 得票数 | 得票率(%) | 順位 |
|---|---|---|---|
| MIRS1901 Cooktailプロジェクト | 9 | 4.9 | 5 |
| MIRS1902 MIRcarriesプロジェクト | 51 | 27.6 | 2 |
| MIRS1903 もっぴープロジェクト | 18 | 9.7 | 4 |
| MIRS1904 thynk!プロジェクト | 29 | 15.7 | 3 |
| MIRS1905 PA-MANプロジェクト | 78 | 42.2 | 1 |
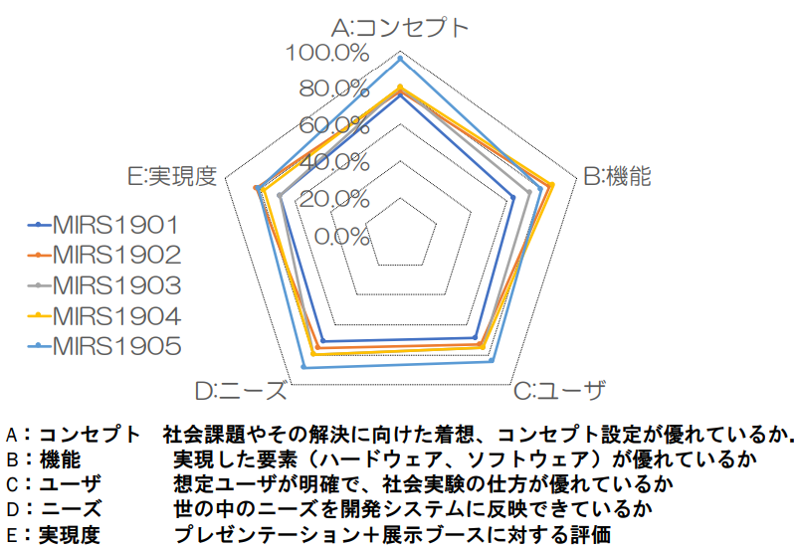
| プロジェクトチーム | コンセプト(%) | 機能(%) | ユーザー(%) | ニーズ(%) | 実現度(%) | 合計(%) | 順位 |
|---|---|---|---|---|---|---|---|
| MIRS1901 | 75.6 | 64.4 | 68.9 | 71.1 | 68.9 | 69.6 | 5 |
| MIRS1902 | 77.8 | 84.4 | 73.3 | 75.6 | 82.2 | 79.3 | 3 |
| MIRS1903 | 80.0 | 73.3 | 75.6 | 80.0 | 68.9 | 74.4 | 4 |
| MIRS1904 | 80.0 | 86.7 | 75.6 | 80.0 | 77.8 | 79.6 | 2 |
| MIRS1905 | 95.6 | 80.0 | 84.4 | 88.9 | 81.1 | 85.2 | 1 |