| 名称 |
MIRS1904 基本設計提案書(メカ) |
| 番号 |
MIRS1904-DSGN-0002-1 |
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A02 |
2019.10.28 |
杉山七海 |
大沼 |
|
ドキュメント内目次
1.はじめに
本ドキュメントはMIRS1904のドキュメントである。
2.全体構造図
今回製作するロボットの全体構造図をFig.1として以下に示す。
Fig.1 全体構造図
3.本体各部の名称
本体の各部名称をFig.2 ,Fig.3に示す。
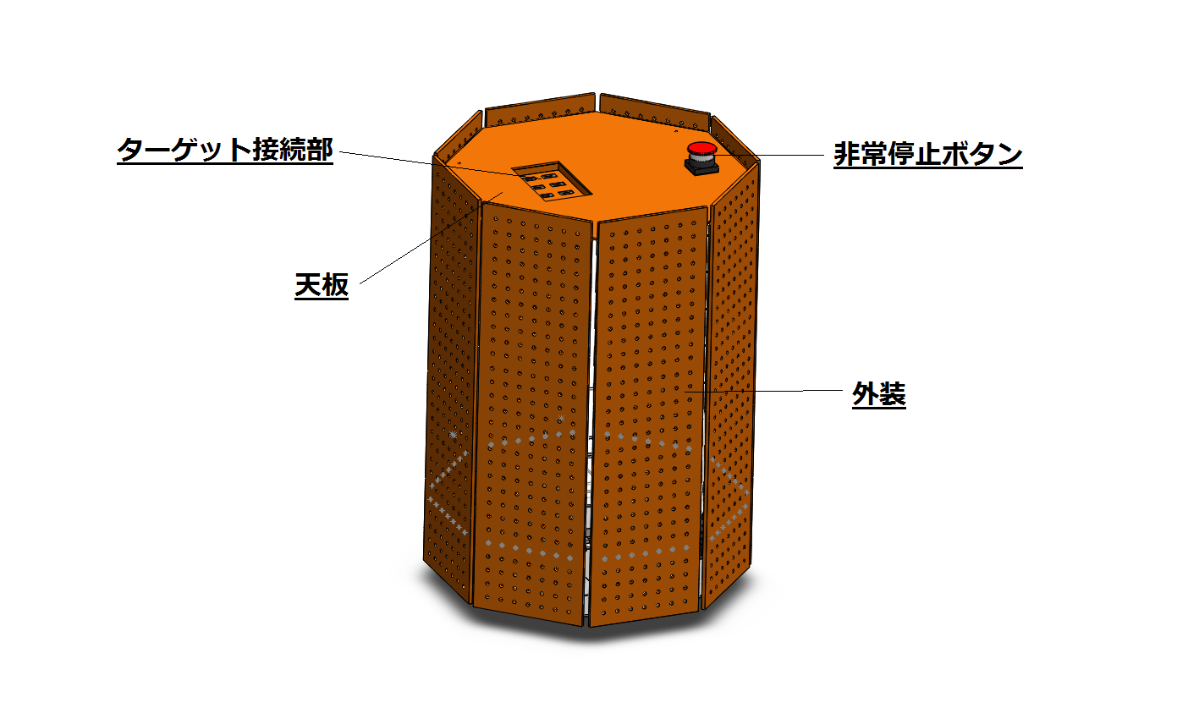
Fig.2 各部名称(外)
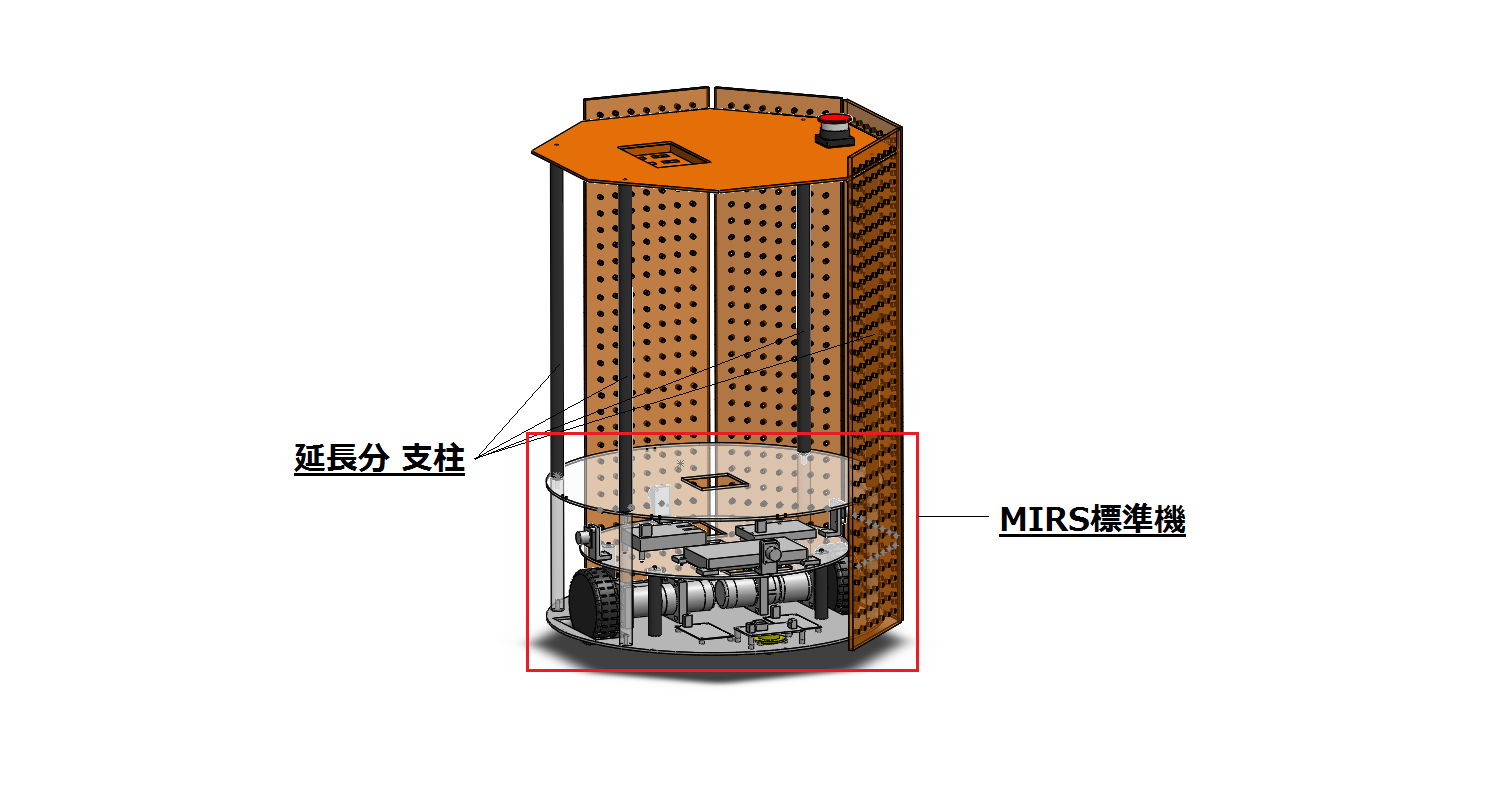
Fig.3 各部名称(内)
4.付属品構造図
①ターゲット構造図
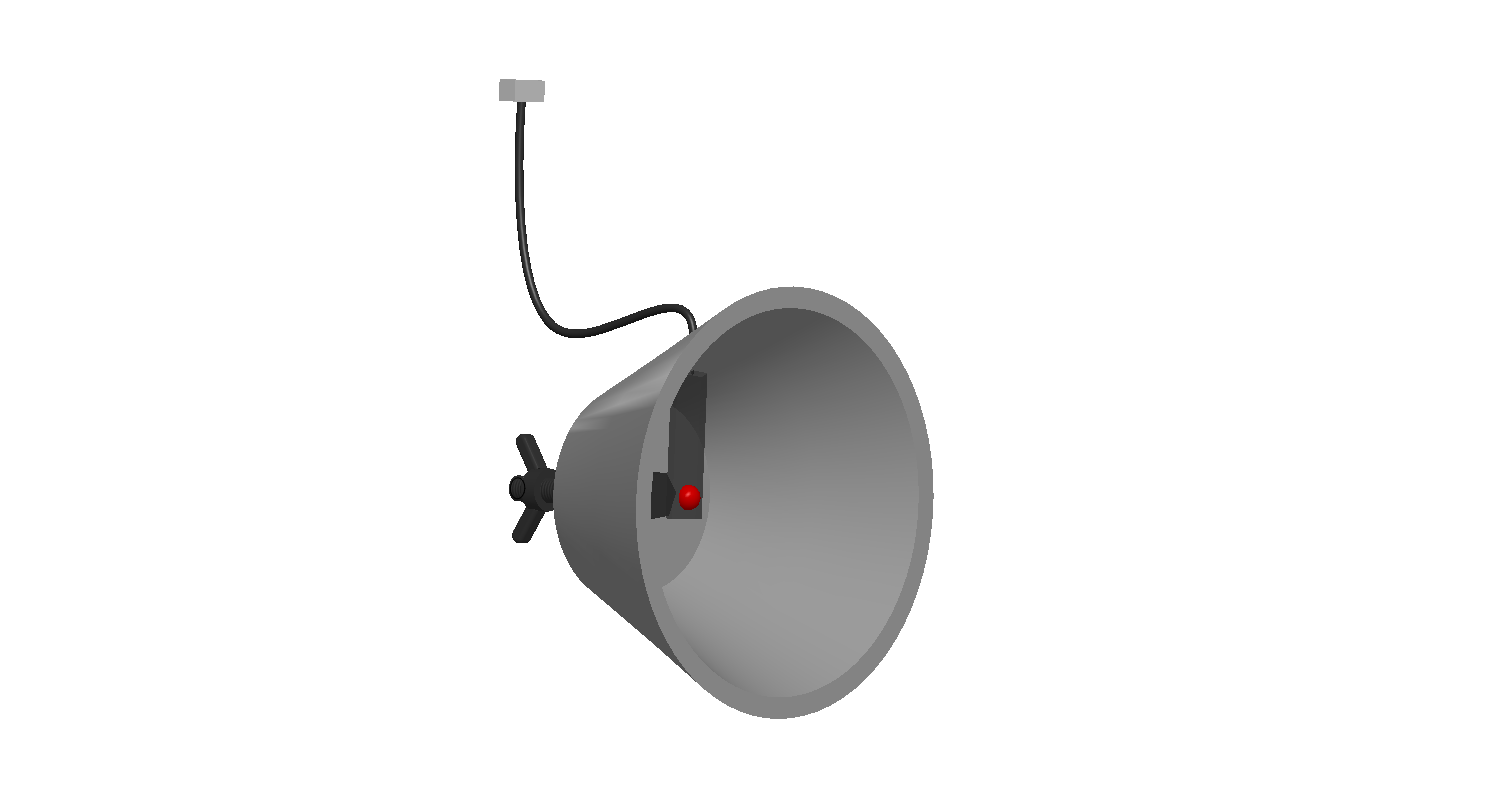
Fig.4 ターゲットイメージ図 前方
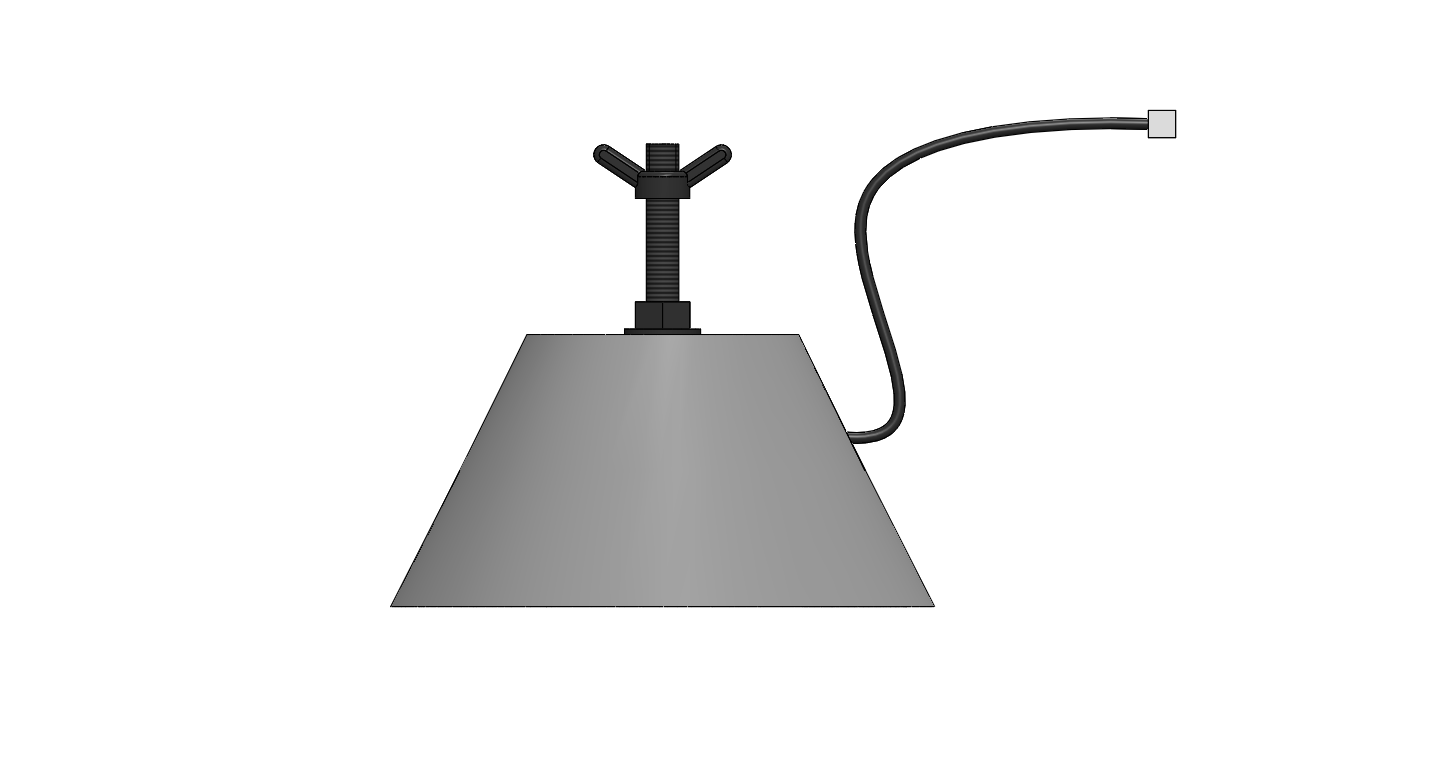
Fig.5 ターゲットイメージ図 横
②シューター構造図

Fig.6 シューターイメージ図
5.付属品各部名称
①ターゲット
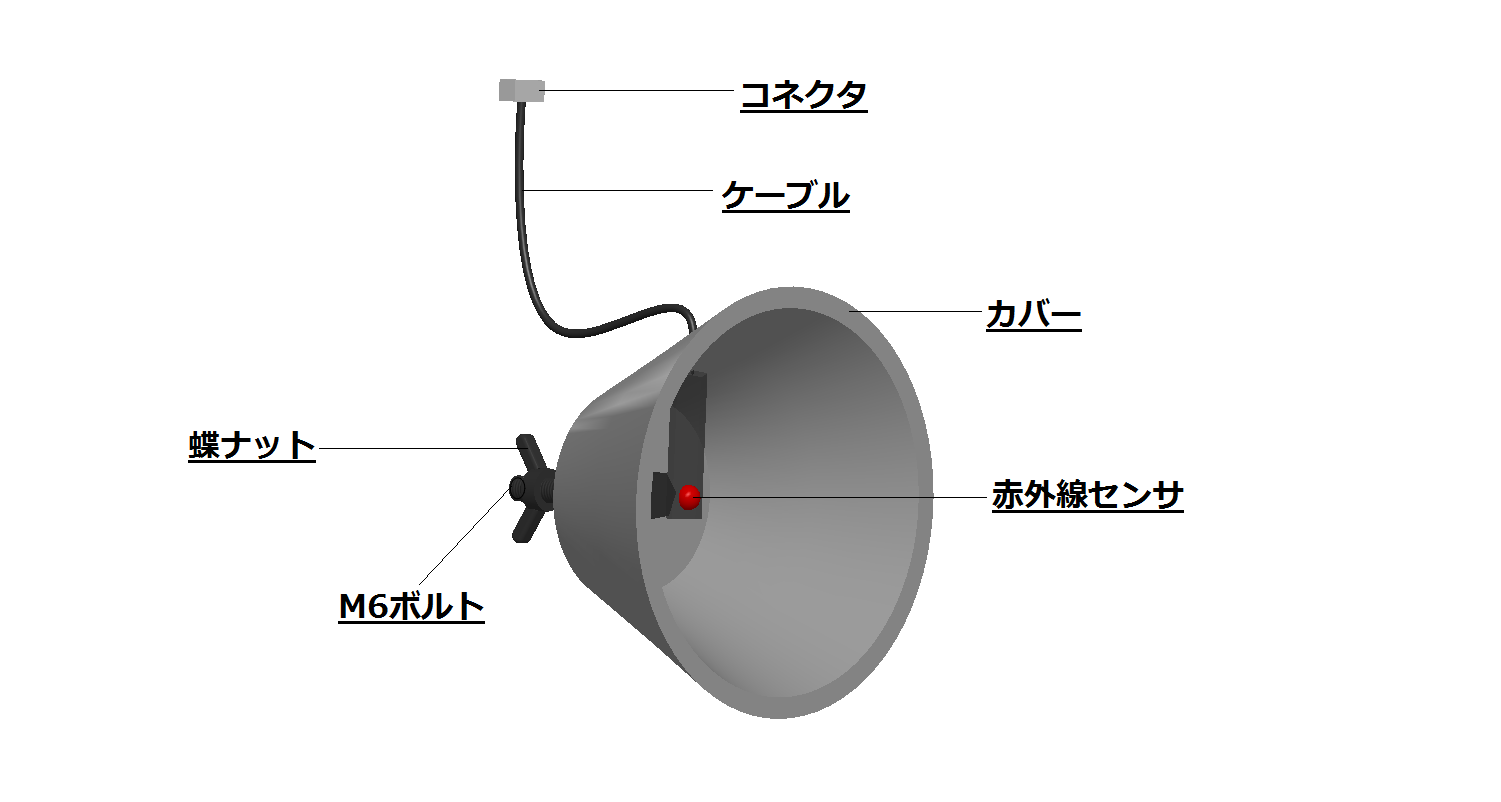
Fig.7 ターゲット各部名称 前方
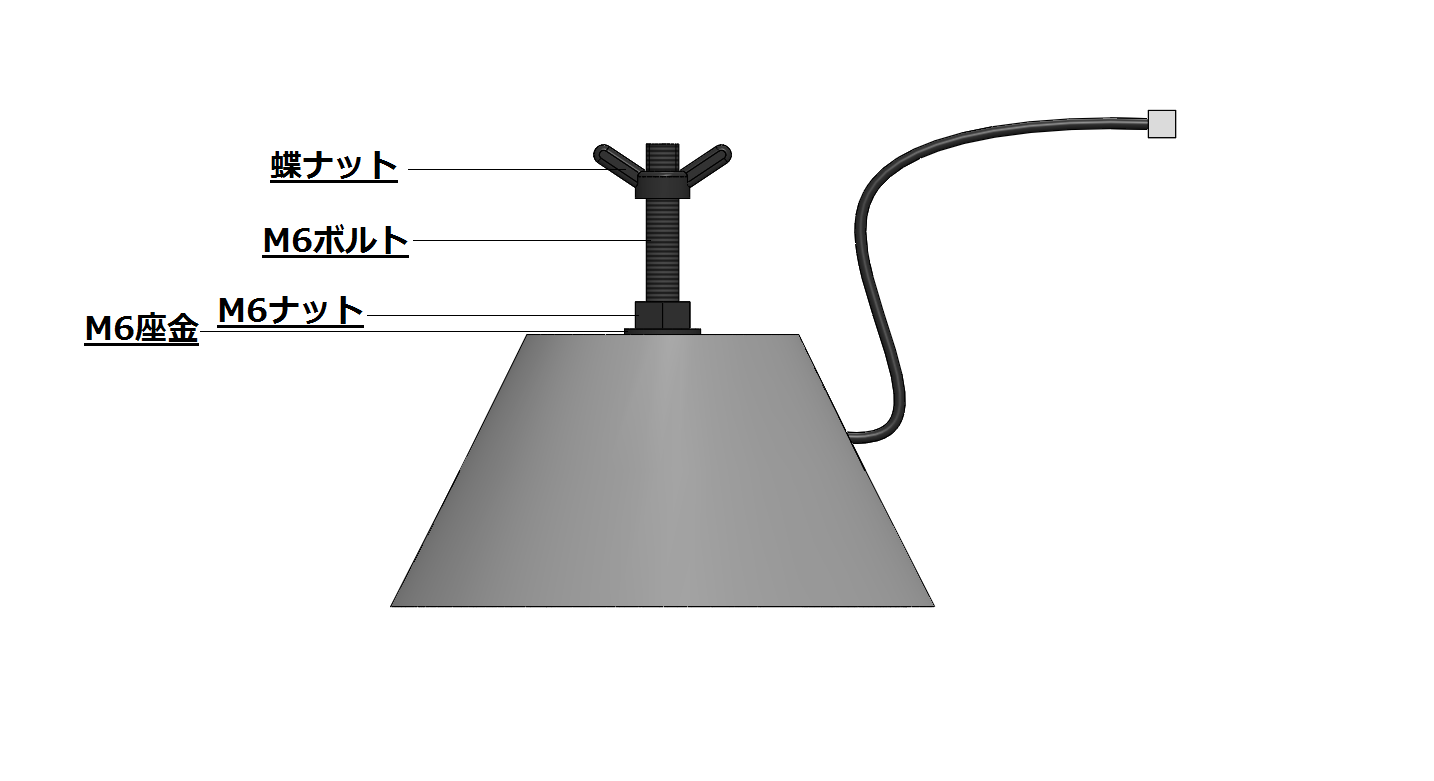
Fig.8 ターゲット各部名称 横
②シューター
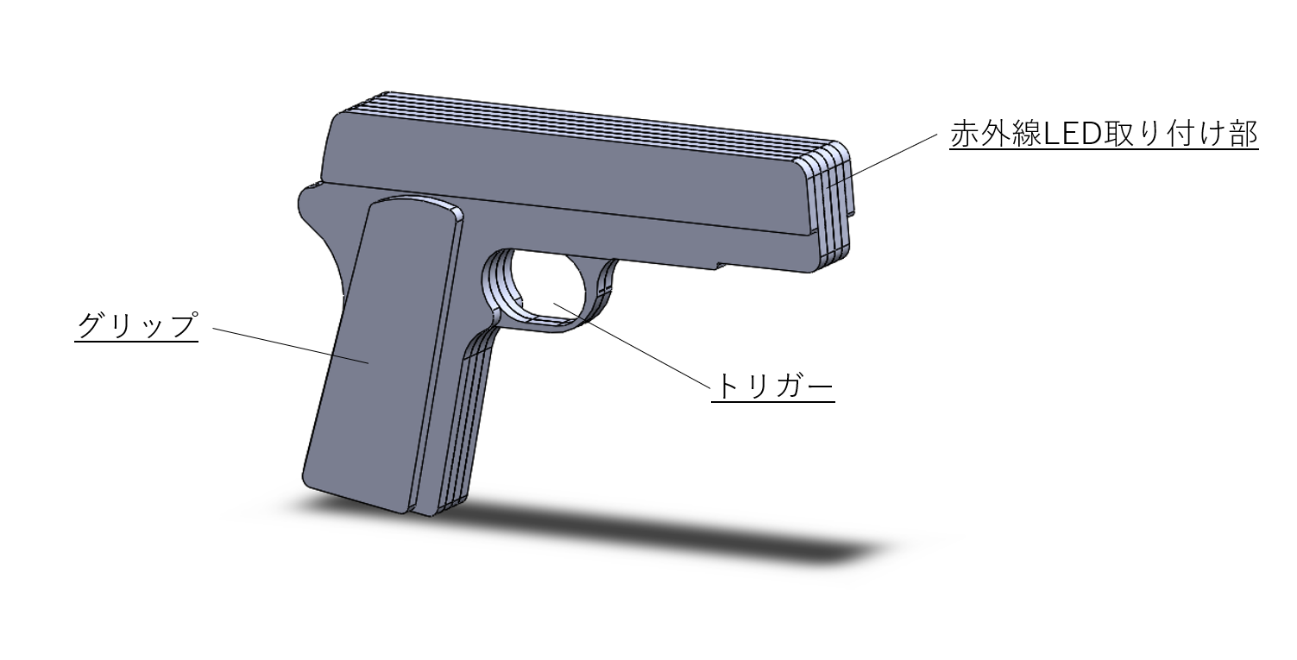
Fig.9 シューター各部名称
6.主要サイズ
①本体サイズ
直径は標準機と同じ400mm
高さを小学校低学年の身長にあわせた600mmとする
②機体構造
高さを600mmまであげるため内部では標準機の支柱を延長する。
外装側面には,ベニヤ板から切り出した8枚の板を用いる。各板には無数の穴を開け,ターゲットを取り付けられるようにする。また,整備性などを考え固定には磁石を用いる。
天板にはベニヤ板から直径400mmの8角形を切り出し用いる。上部にはターゲットの接続ポートと非常停止ボタンを取り付ける。
③ターゲット接続方法
ターゲットは外装板の穴にボルトで固定する方法を用いる。
ターゲット本体にあらかじめボルトを挿しておき,裏側から蝶ナットで板に固定する。
④シューターについて
シューターの詳細について
搭載する回路や各部のパーツが確定していないため現時点のシューターのイメージ図はMDFにて製作する外装のおおまかなイメージ図となっている。回路等のパーツについては内側のパーツの内部に空洞を作り収納するスペースを作る。
提供方法について
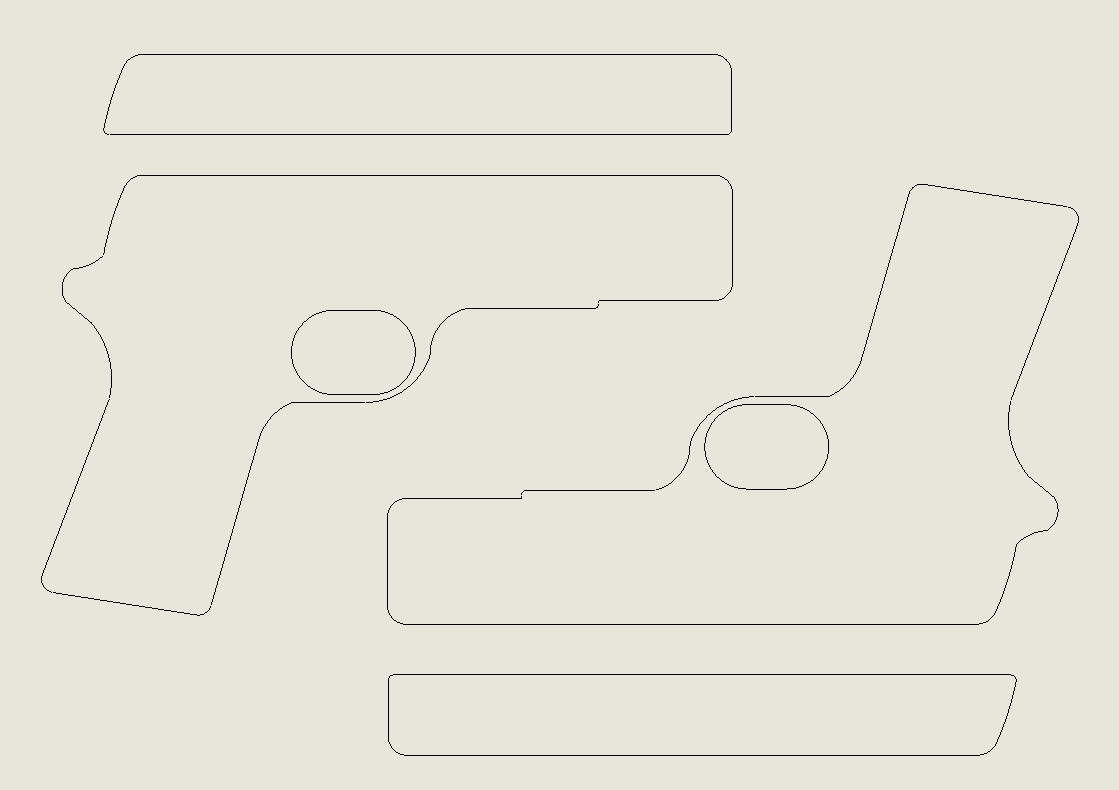
Fig.10 シューターキット①
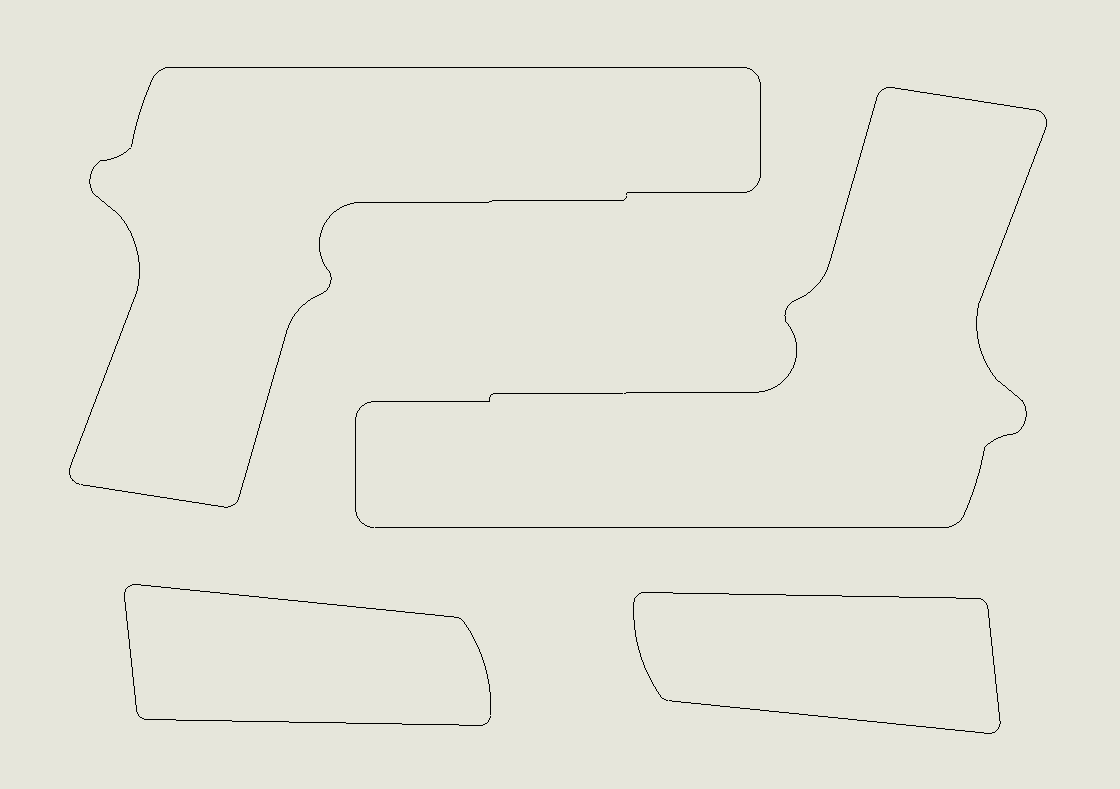
Fig.11 シューターキット②
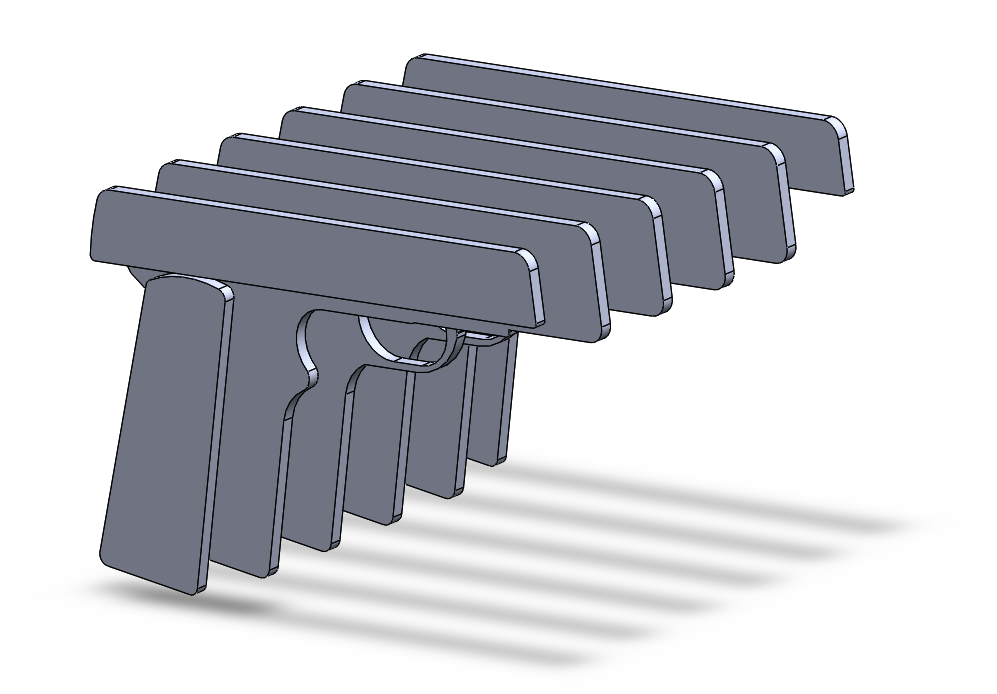
Fig.12 シューターキット 組み立てイメージ
Fig.10,Fig.11のようなキットをMDFにて製作し、体験者に配布し自身でシューターを製作してもらう。レーザーカットにてパーツをあらかじめカットしておき手で押しただけでパーツが板から取り外せるようにしておく。組み立て方法についてはFig.12のように複数のパーツを張り合わせて組み立てる。予算の関係で2セットのみの提供となる。(回路関連のパーツ代が高価なため)
7.製作品の概要
各パーツの加工方法をTable.1に示す。
Table.1 各パーツの加工方法
| パーツ名 |
個数 |
使用用途 |
加工方法 |
| 長方形ベニヤ板 |
8 |
外装用 |
共通部材のレーザー加工機 |
| 八角形ベニヤ板 |
1 |
天板用 |
共通部材のレーザー加工機 |
| ポインタ用センサマウント |
6 |
受光センサを固定 |
3Dプリンタで製作 |
| MDF(5mm厚,A3) |
4 |
シューター用外装(2セット分) |
MDFをレーザー加工 |
| 400mmアクリル支柱 |
4 |
支柱の延長 |
タップ加工 |
基本設計(全体)
基本設計(エレキ)
基本設計(ソフト)
MIRS DATABASE