| 名称 | MIRS1804 システム提案書 |
|---|---|
| 番号 | MIRS1804-DSGN-0001 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| B02 | 2018.10.19 | 足立颯一郎 | 初版 |
New Gym員 Project
『先生!休んでください!』
| 機能名 | 機能内容 |
|---|---|
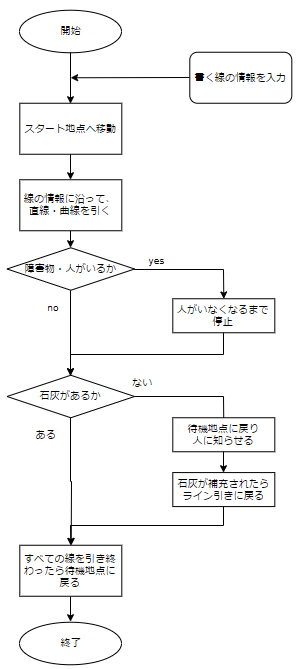
| 走行機能 | 指定されたラインを走ることができる。 |
| 白線引き機能 | 指定された位置で白線を引くために粉を落とすことができる。 |
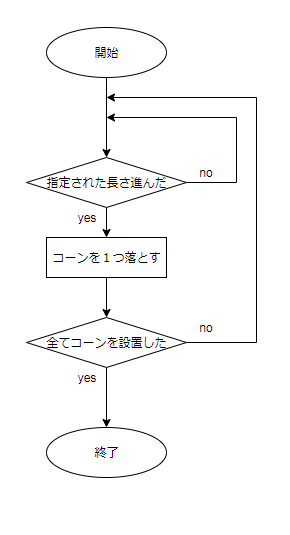
| マーカー設置機能 | 指定された位置でマーカーを設置することができる。 |
| 原点復帰機能 | MIRSが元いた場所へ帰ることができる。 |
| 衝突防止機能 | 前方に人を感知したらその場で一時停止し、人がいなくなったら作業を再開する。 |
| 経路図面選択アプリケーション | 使用者がMIRSが走る経路を選択できるアプリケーション |
| 部位 | 素材、部品 | 備考 |
|---|---|---|
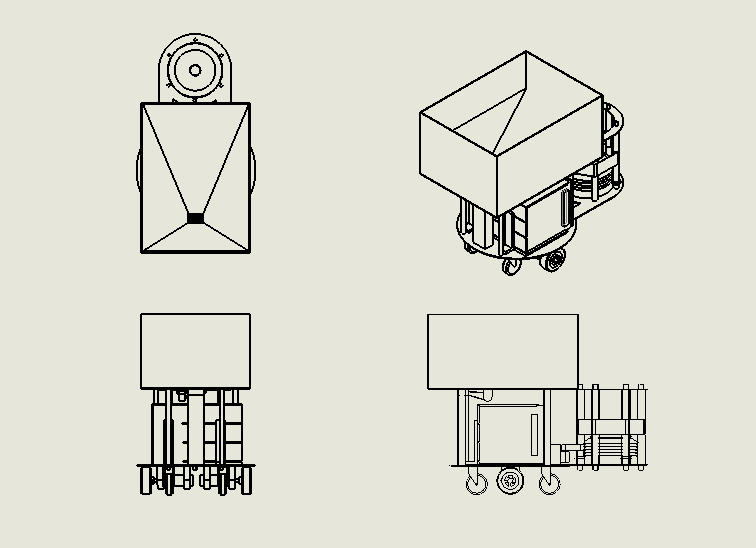
| 機体 | 標準機(改良あり)、GPSモジュール、サスペンション付きキャスター | GPSは精度によって変わる可能性あり。野外の走行テストの結果によってキャスターも同様。 |
| 石灰ボックス | ベニヤ板 | 塗装等の加工有 |
| 白線引き機構 | ベニヤ板、モータ、ブラシ、その他 | |
| マーカー設置機構 | アルミパイプ、ベルト、モータ、その他 | 機構の動作によって機構そのものを変更する可能性あり。 |
| 分野 | 内容 | 目的 |
|---|---|---|
| エレキ、ソフト | RaspberryPiにGPSを搭載 | 屋外での使用を想定し、ロータリーエンコーダだけではMIRSの位置把握が難しいため。 |
| メカ | ラインカーへの移行、マーカー設置機構の取り付け | 白線を引き、マーカーを設置するため。 |
| 物品 | 単価 | 必要数 | 小計 |
|---|---|---|---|
| マーカーコーン10個入り | \799 | 2 | \1598 |
| ベニヤ板 (600×900×5.5[mm]) | \1390 | 6 | \8340 |
| アルミ棒 | \779 | 2 | \1558 |
| アルミパイプ | \469 | 6 | \2814 |
| ベアリング | \199 | 2 | \1791 |
| サスペンション付きキャスター | 未定 | 未定 | 未定 |
| モータ | 未定 | 2 | 未定 |
| GPSモジュール | 未定 | 1 | 未定 |
| 合計金額 | \16101 |