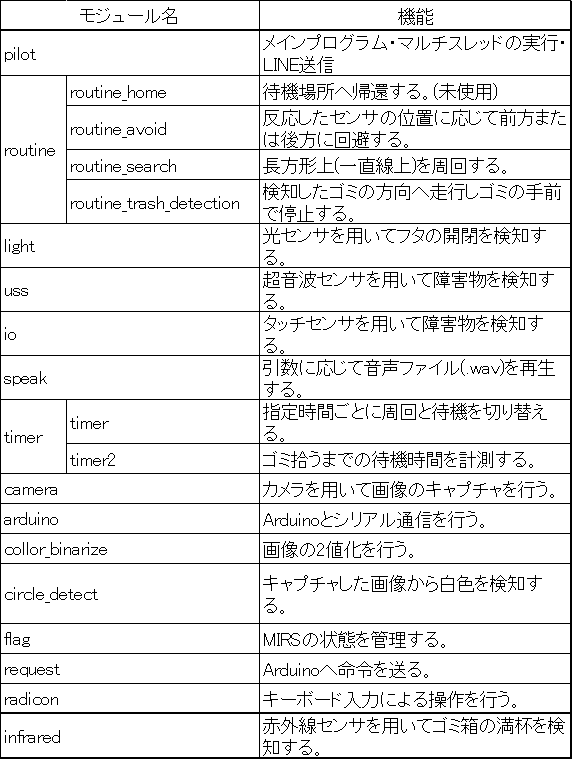
表1:モジュール構成
| 名称 | MIRS1802 ソフトウェア開発報告書 |
|---|---|
| 番号 | MIRS1802-SOFT-0002a |
| 版数 | 最終更新日 | 作成 | 承認 |
|---|---|---|---|
| A02 | 望月 | 牛丸先生 |
本ドキュメントは、MIRS1802のソフトウェア開発報告書である。
製作したモジュール構成を以下に示す。
表1:モジュール構成
担当:西島・望月
当初は長方形上を周回する予定だったが、
発表会のデモスペースの広さとの兼ね合いから、一直線上を往復移動した。
PV・発表会のデモでは、回避行動・待機場所への移動は実装はされていたが時間がなかったため披露されなかった。
担当:西島
幅60cm、奥行き40cmの範囲をカメラ検知する。
床に発生した蛍光灯の光の反射の影響を受けゴミ検知がうまく動作しなかったため、
床に制約条件を加えることとなった。
詳細設計の通りの動作を確認できた。
担当:西島
状況に応じた音声出力を行う。
PV・発表会のデモでは、「何か落ちてるよ」「ありがとう」が披露された。
詳細設計の通りの動作を確認できた。
担当:西島
非常停止スイッチの押下・ゴミ箱の満杯・バッテリー残量の低下をLINE通知する。
発表会のデモでは、実装はされていたが時間がなかったため披露されなかった。
詳細設計の通りの動作を確認できた。
担当:望月
指定時間経過により周回・待機を切り替える。
PV・発表会のデモでは、実装はされていたが時間がなかったため披露されなかった。
詳細設計の通りの動作を確認できた。
担当:西島
標準機のプログラムに赤外線センサのプログラムを追加した。
標準機のプログラムに変更はなく、センサの追加のみであったため早期に完成した。
詳細設計の通りの動作を確認できた。
ソフト詳細設計書へのリンクを以下に示す。
詳細設計
各プログラムへのリンクを以下に示す。
Raspberry Piプログラム
Arduinoプログラム
詳細設計に示した動作は比較的早期に完了した。
開発していく過程で新たに機能の追加や、統合などがあったが、
設計下通りの動きをさせることができた。
優勝はできなかったものの、来客・教員からの評価はともに第2位と健闘できたと思う。