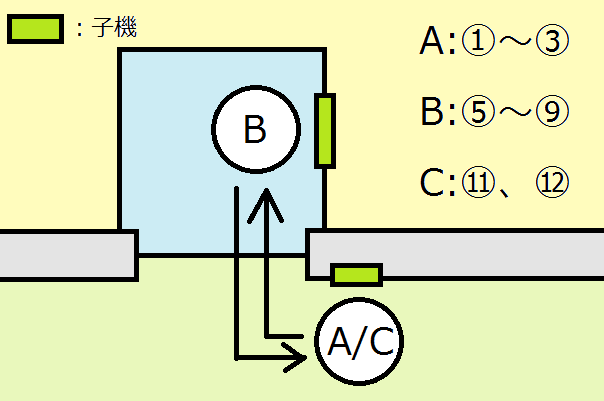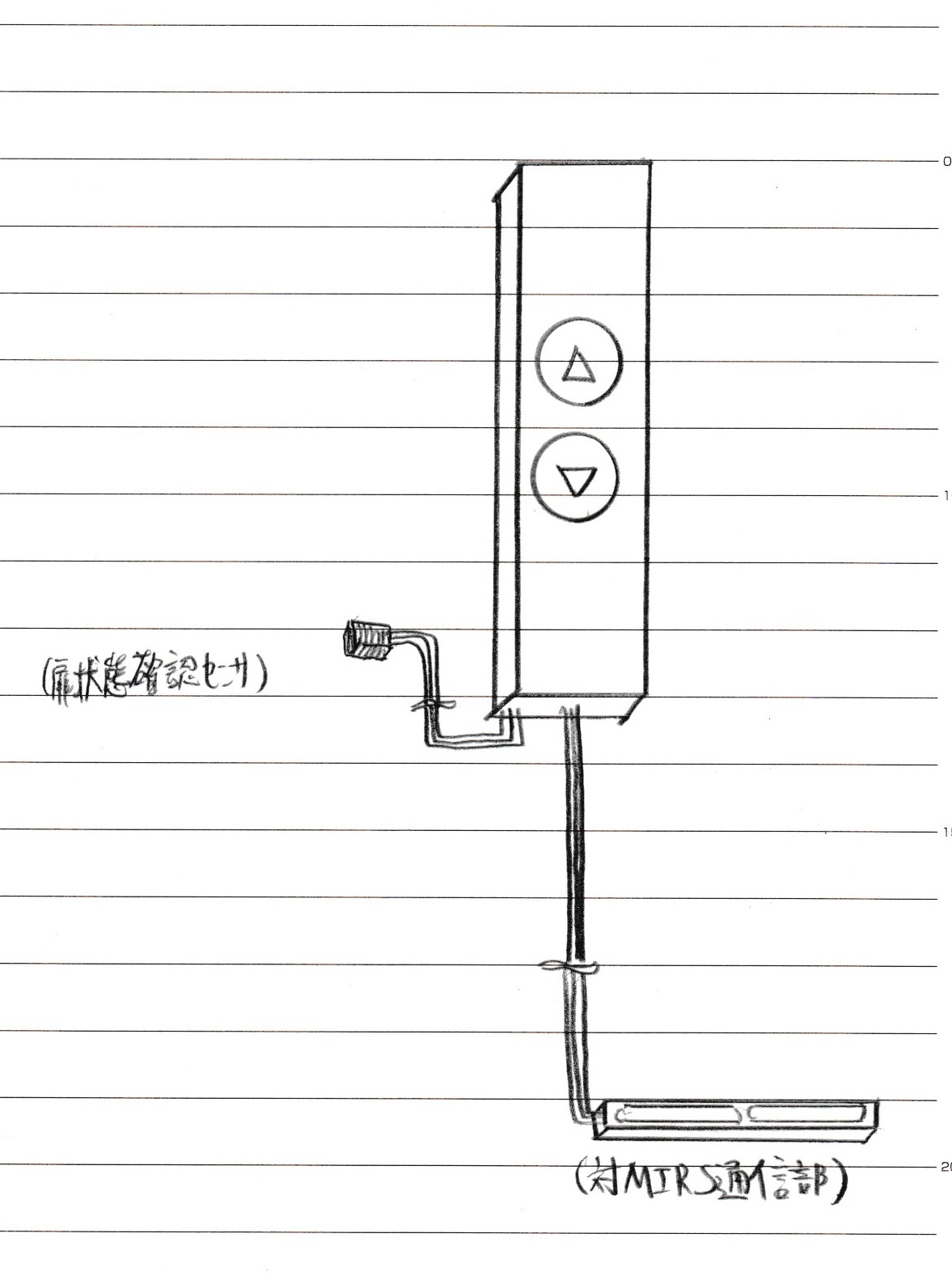
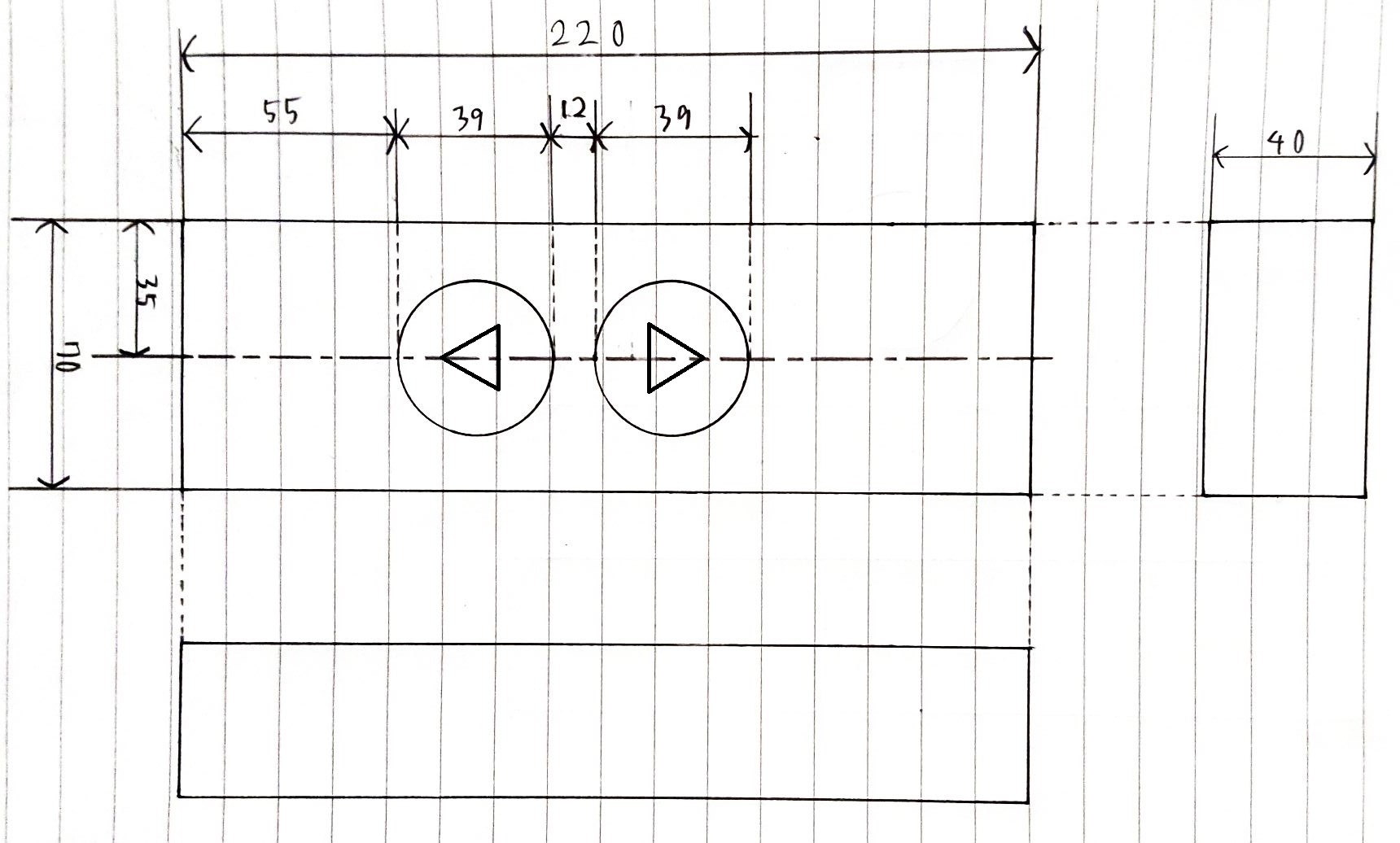
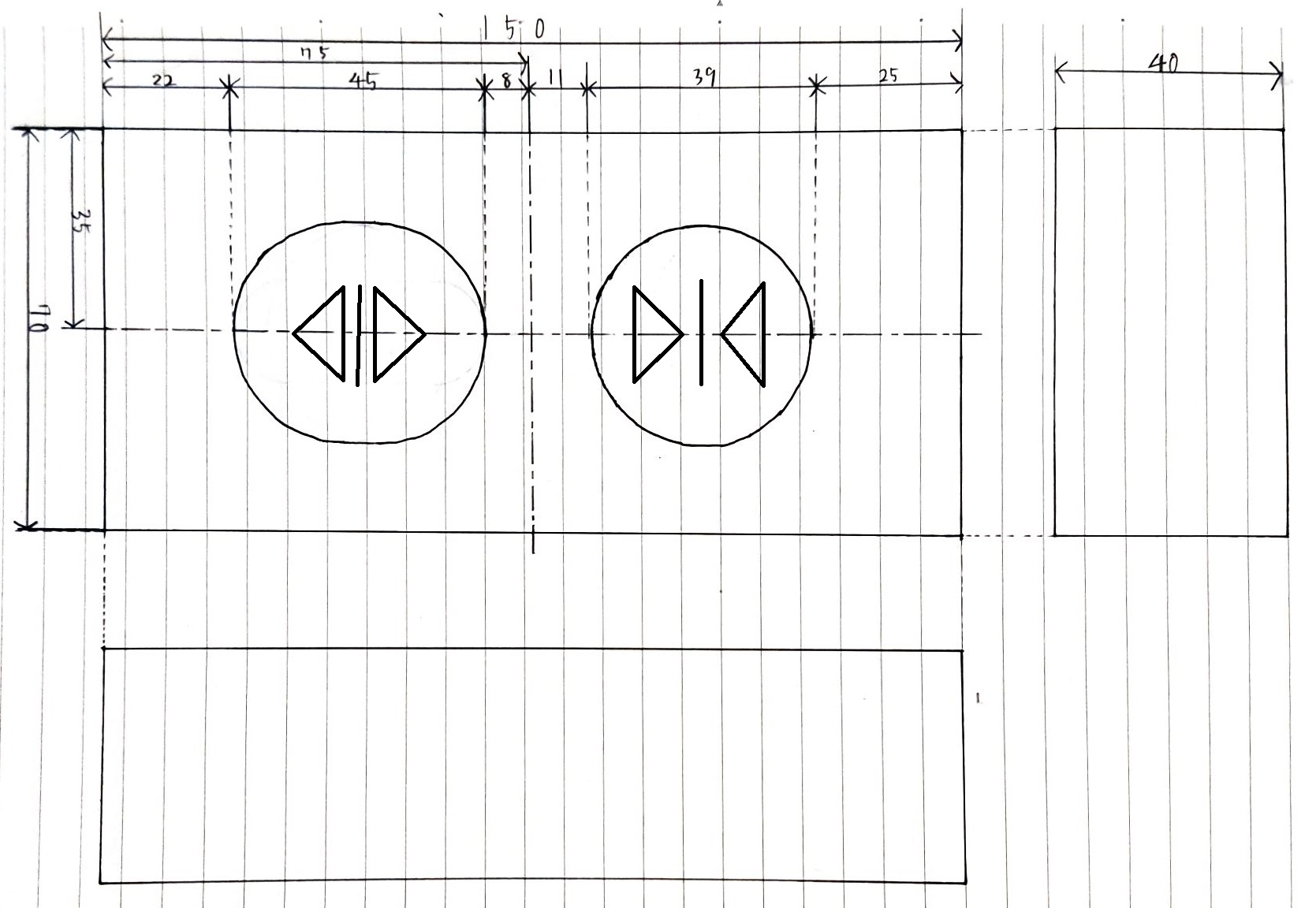
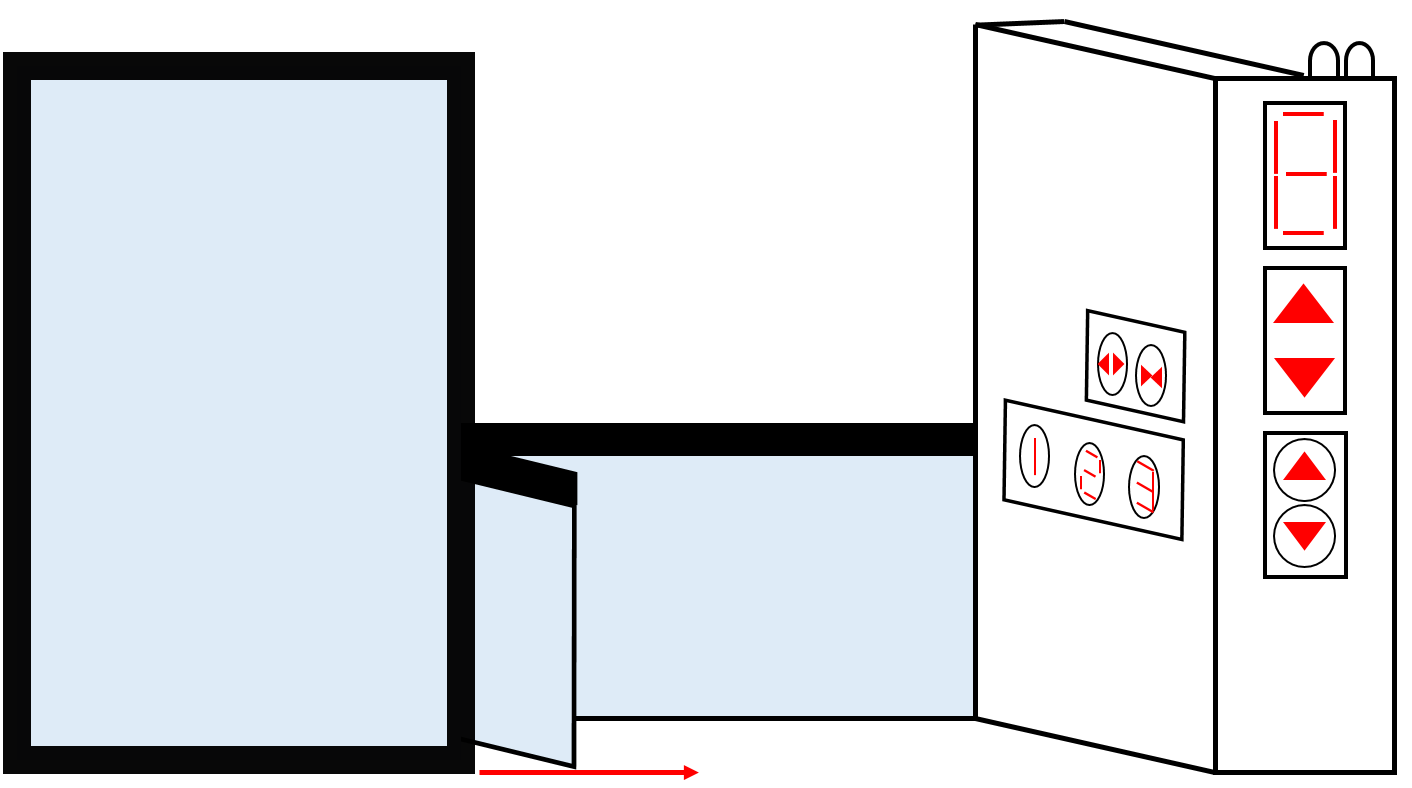
Fig1 二階乗場操作盤設置用子機(全体図) Fig2 二階乗場操作盤設置用子機(主要サイズ)
| 名称 | MIRS1704 エレベーター機能基本設計書 |
|---|---|
| 番号 | MIRS1704-DSGN-0004 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2017.11.15 | 松藤由郁 | 初版 |
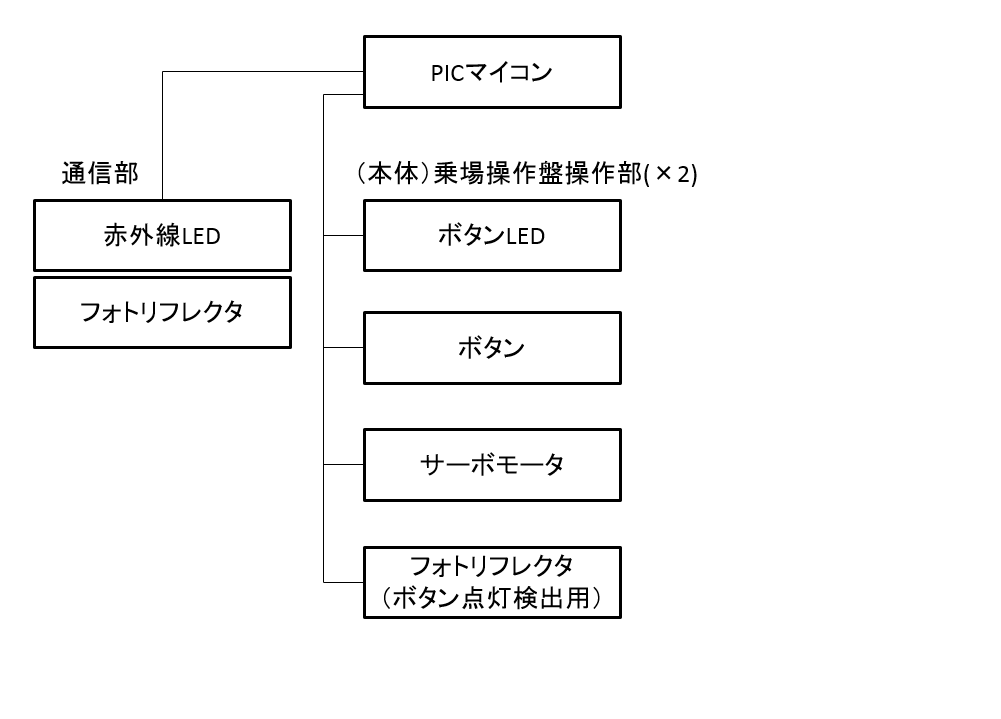
| 種類 | 個数 | 機能 | 接続親機器 |
|---|---|---|---|
| 赤外線LED |
5 | MIRS本機との交信用 | PIC |
| フォトトランジスタ(赤外線) |
5 | MIRS本機との交信用 | PIC |
| フォトトランジスタ |
5 | エレベータボタンのランプの点灯の有無によるボタン押下検知 | PIC |
| サーボモータ |
5 | エレベータ操作盤のボタン押下用 | PIC |
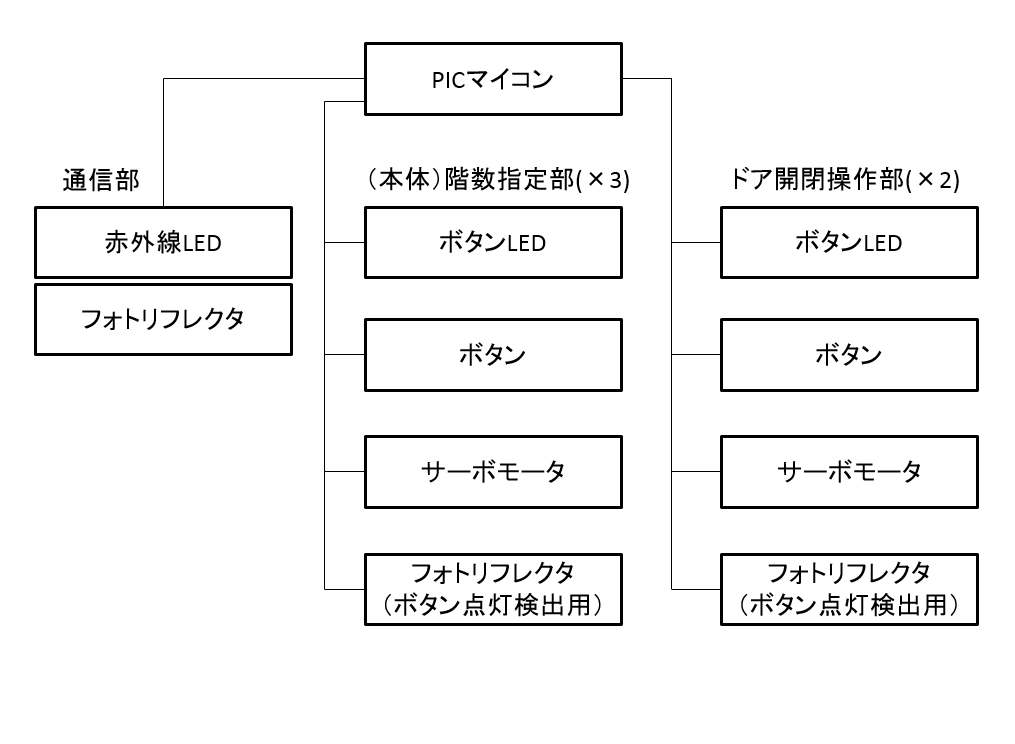
| 種類 | 個数 | 機能 | 接続親機器 |
|---|---|---|---|
| 赤外線LED |
5 | MIRS本機との交信用 | PIC |
| フォトトランジスタ(赤外線) |
5 | MIRS本機との交信用 | PIC |
| フォトトランジスタ |
2 | エレベータボタンのランプの点灯の有無によるボタン押下検知 | PIC |
| サーボモータ |
2 | エレベータ操作盤のボタン押下用 | PIC |
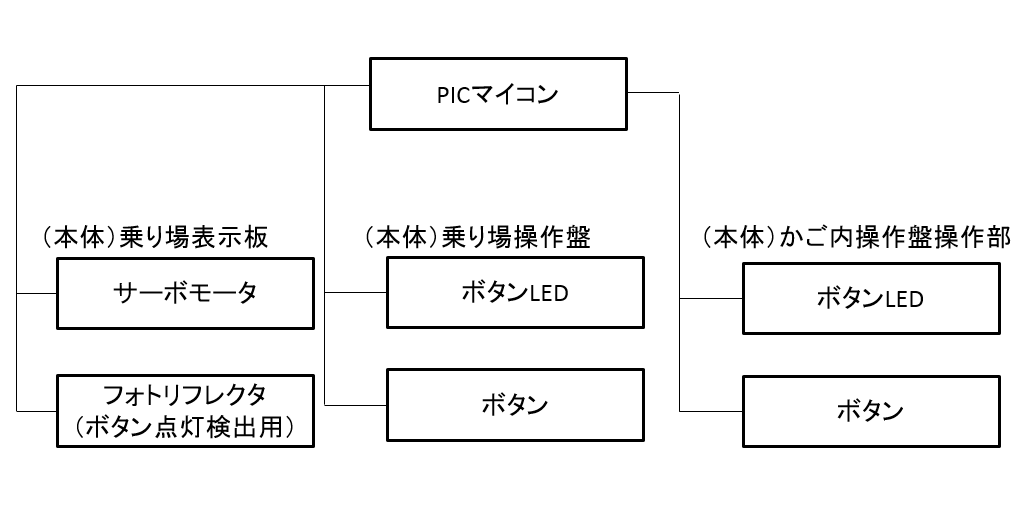
| 種類 | 個数 | 機能 | 接続親機器 |
|---|---|---|---|
| 昇降矢印LED |
2 | エレベータの仮想状態の表示 | PIC |
| 操作盤ボタン |
5 | 上昇、下降と目的階の入力 | PIC |
| 7segLED |
1 | エレベータの仮想階の表示 | PIC |
| 操作ボタンLED |
1 | ボタンが押下されたことを示す | PIC |