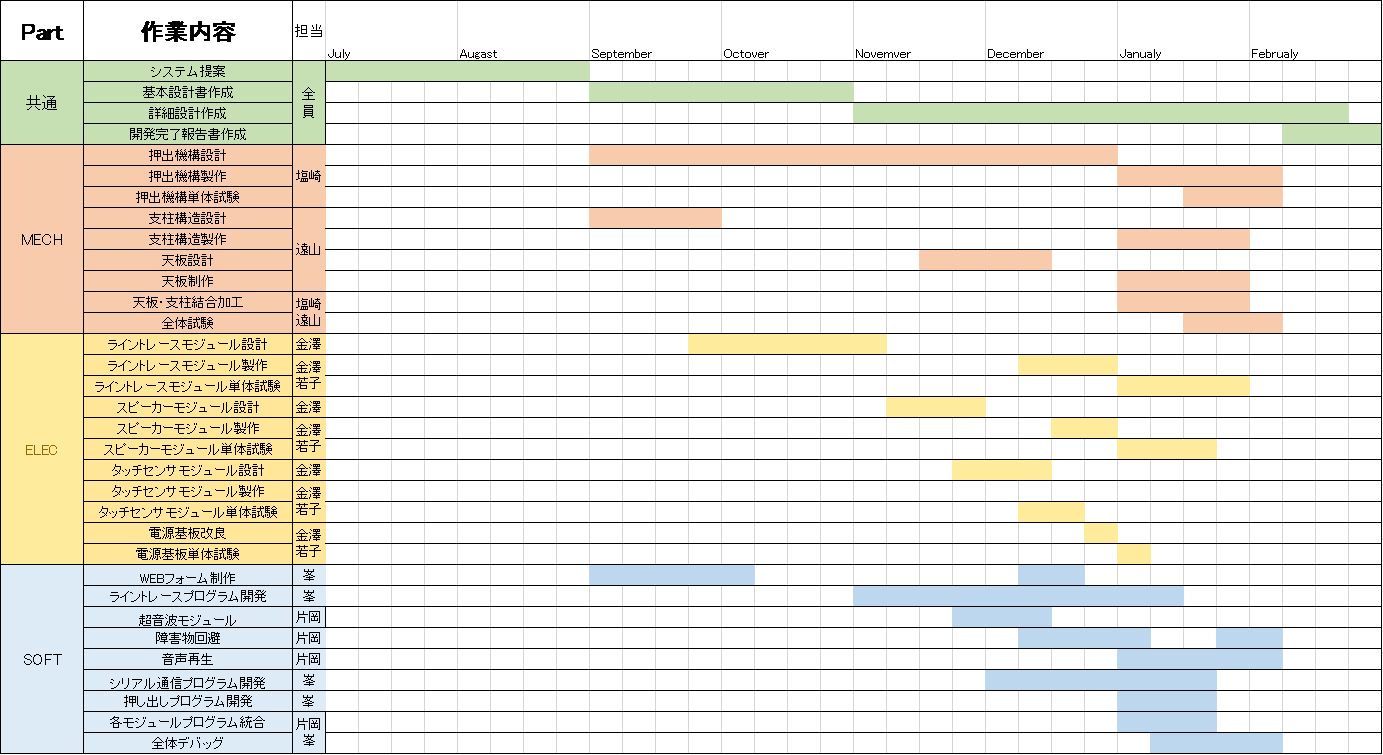
図1 実際の開発工程
| 来場者投票 | 15票(同率4位) |
|---|---|
| その他表彰 | ブログいいね賞 |
| アンケート結果・アイディア部門 | 5位 |
| アンケート結果・展示部門 | 3位 |
| アンケート結果・カタログ部門 | 4位 |
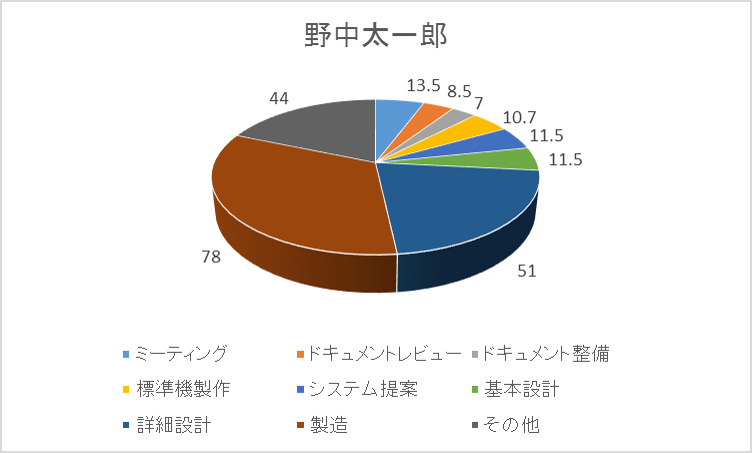
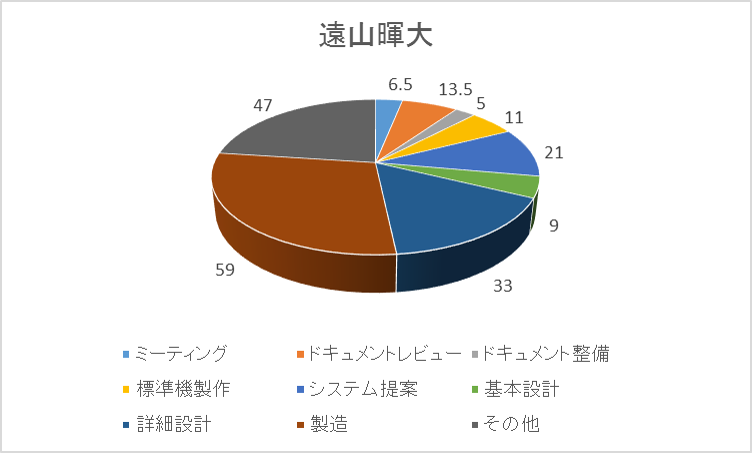
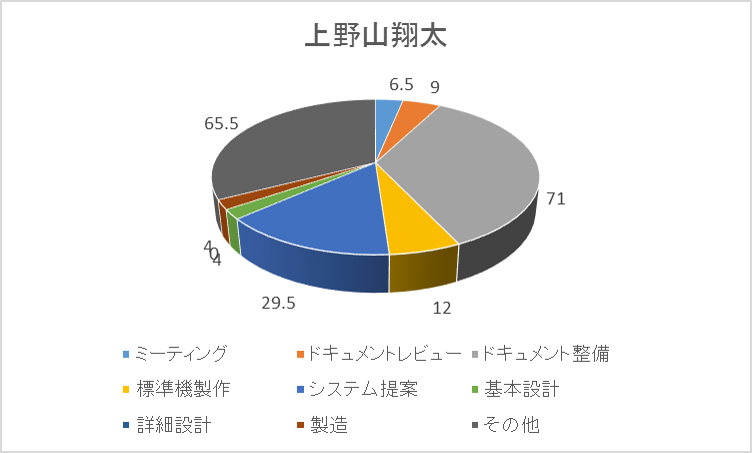
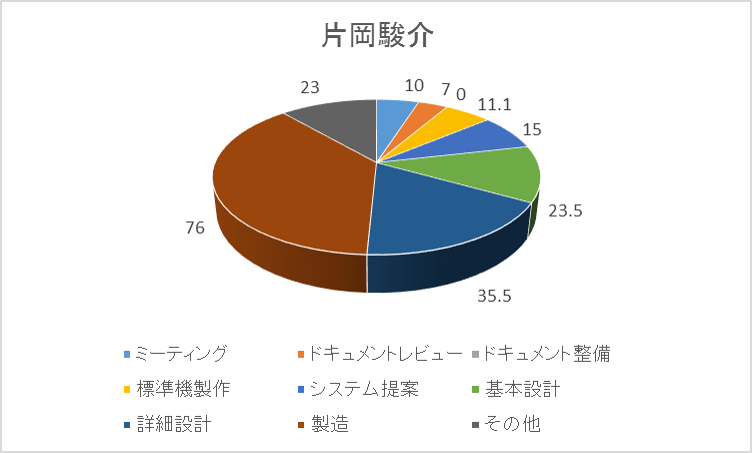
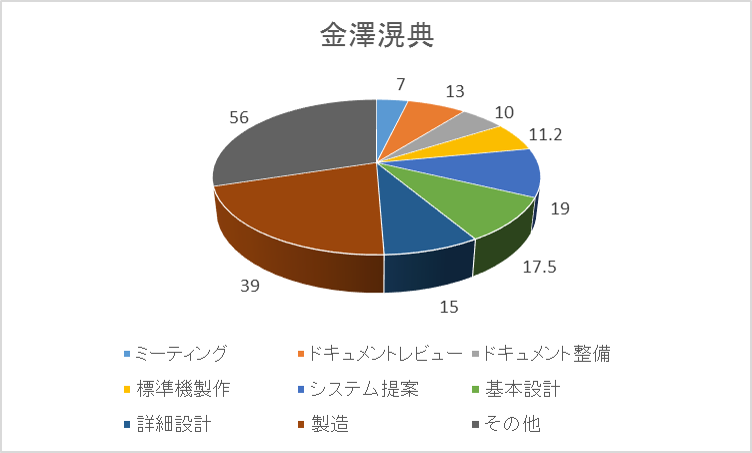
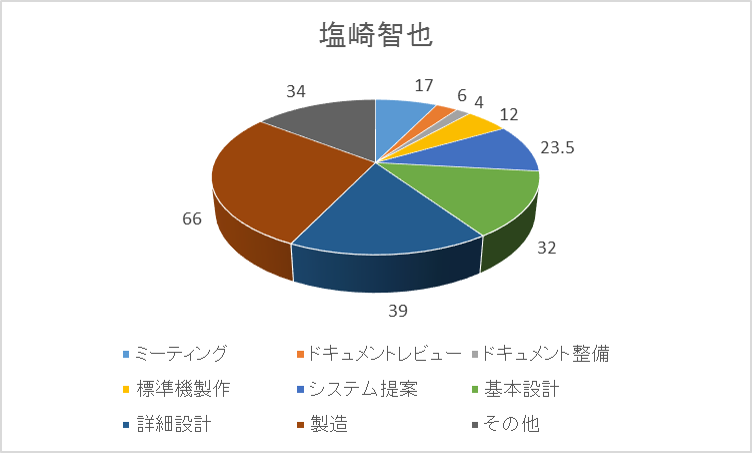
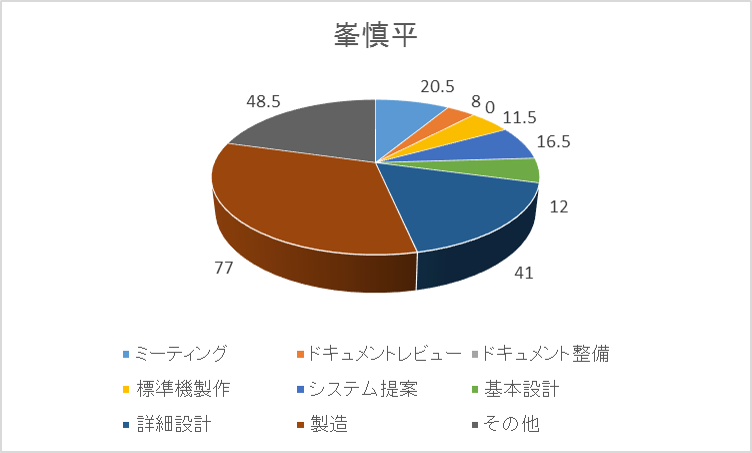
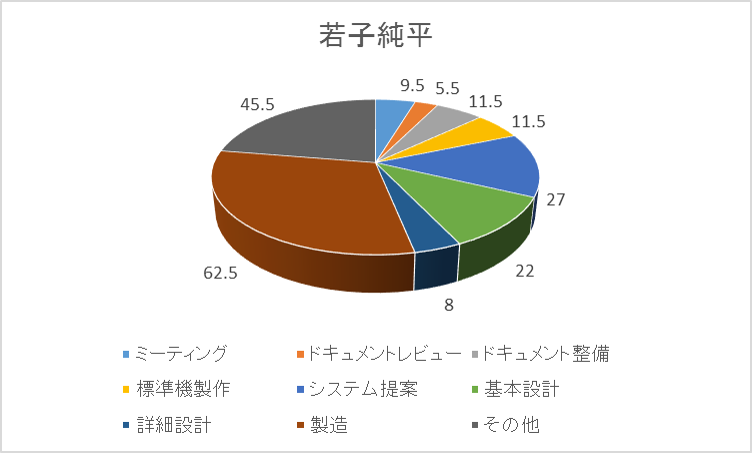
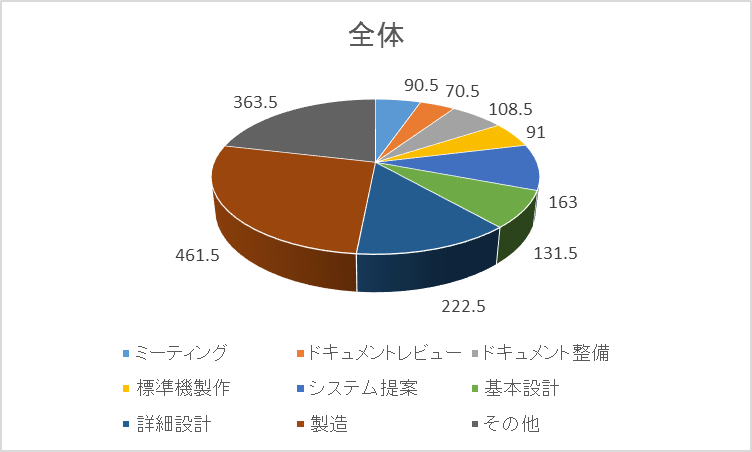
| ミーティング | [01:ミーティング] |
|---|---|
| ドキュメントレビュー | [02:ドキュメントレビュー] |
| ドキュメント整備 | [03:ドキュメント整備] |
| 標準機製作 | [11:標準部品製造・試験][12:標準機機能試験][14:標準機統合試験] |
| システム提案 | [20:技術調査][21:システム提案、開発計画立案] |
| 基本設計 | [22:システム基本設計] |
| 詳細設計 | [30:メカ詳細設][31:メカ詳細設][32:ソフト詳細設計] |
| 製造 | [23:システム統合試験][40:システム統合試験][41:エレキ製造・試験][42:ソフト実装・試験] |
| その他 | [52:ソフト実装・試験][60:その他] |
| 名称 | MIRS1703 開発完了報告書 |
|---|---|
| 番号 | MIRS1703-REPT-0002a |
最終更新日:2017.9.22
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2018.2.9 | 上野山 | 初版 |