はじめに
本ドキュメントはMIRS1702におけるエレクトロニクス詳細設計書について記述したものである。
作成箇所
ブロック図を以下に示す。

fig1:ブロック図
高度センサをI2Cでラズベリーパイと通信しようとしていたが、相性が悪く通信することができなかったため、ArduinoとI2C接続に変更した。
アンプの電源もラズベリーパイから5V取っていたが、ラズベリーパイの電源のモバイルバッテリの出力が厳しいため、模型用バッテリから取ることにした。
作成箇所
作成個所を以下の表1に示す。
| モジュール | 品名 | 機能 |
|---|---|---|
| ラズベリーパイシールド | 各種センサとラズベリーパイの接続 | |
| Arduinoシールド | モータードライバや高度センサとArduinoの接続 | |
| 電源ボード | モーター用電源の制御・分配 | |
| アンプ | TA7368使用小型アンプキット | ライン出力音声をスピーカから出力ために信号を増幅する |
| デジタルコンパス | HMC5883L使用 デジタルコンパスモジュール 3軸地磁気センサ DIP化キット | 現在向いている方位の把握 |
| GPS | GPS受信機キット 1PPS出力付き 「みちびき」対応 | 現在位置の把握 |
| 高度センサ | MS5607 | 現在の高さ(何階か)の把握 |
| 超音波センサ | SRF02 | 周囲の障害物との距離の把握 |
| タッチセンサ | SS-5GLD | 衝突の検知 |
ラズベリーパイシールド
ラズベリーパイシールドの改造点は、3つある。
1つ目は現状3つのタッチセンサ用ポートを増設し4つにする。
2つ目はI2Cセンサ用)のポートの3.3V(デジタルコンパス用)を1つ。5V(超音波センサ用) を2つ増設する。
3つ目はURAT通信用(GPS)のポートを1つ新規作成する。
ラズベリーパイシールドの回路図を以下に示す。
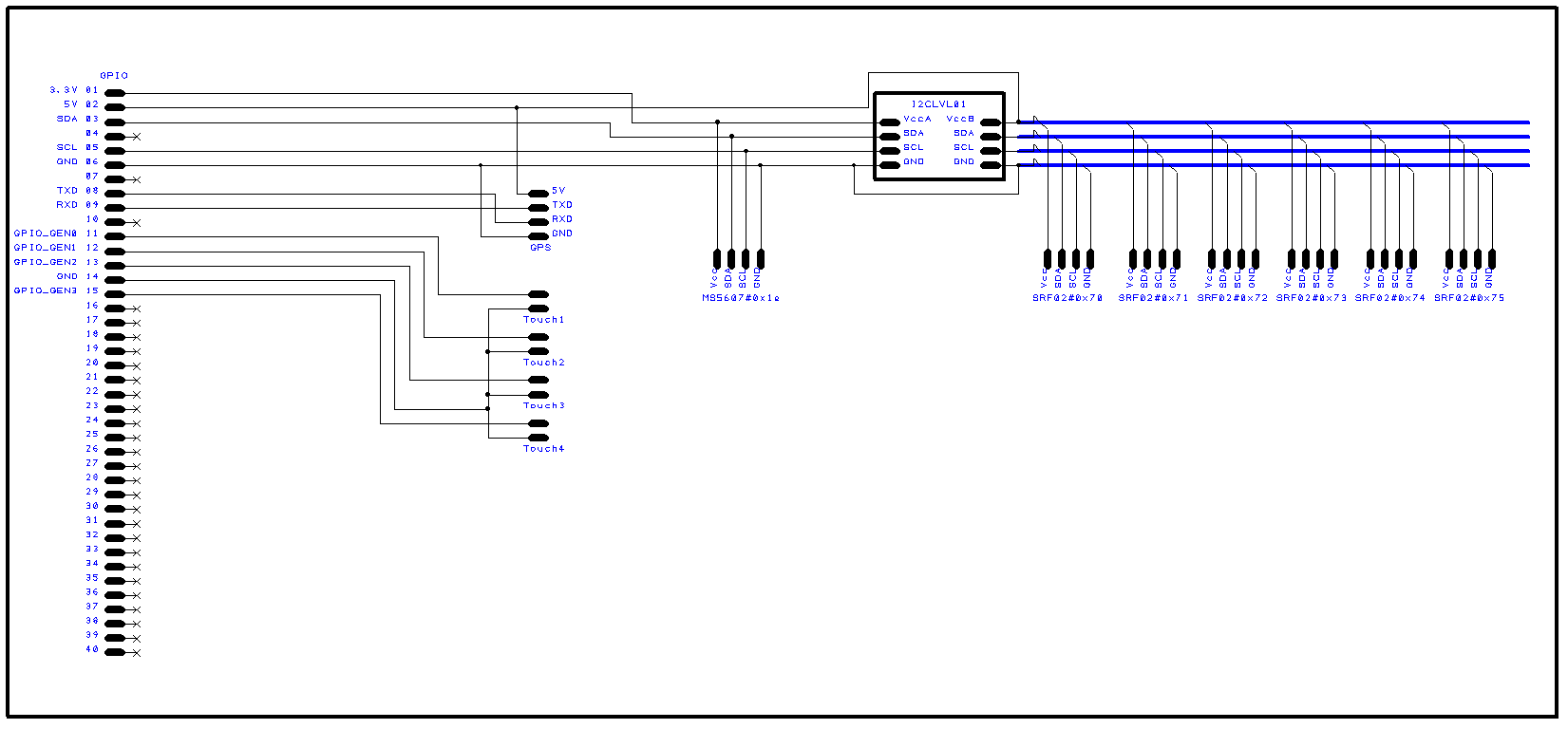
fig2:ラズベリーパイシールド回路図
標準機作成時に作った基板の空きスペースを使って上図の回路を実装した。
この時、できる限り見た目をよくするためにコネクタの向きを統一するように気を付けた。
製作結果を以下に示す。
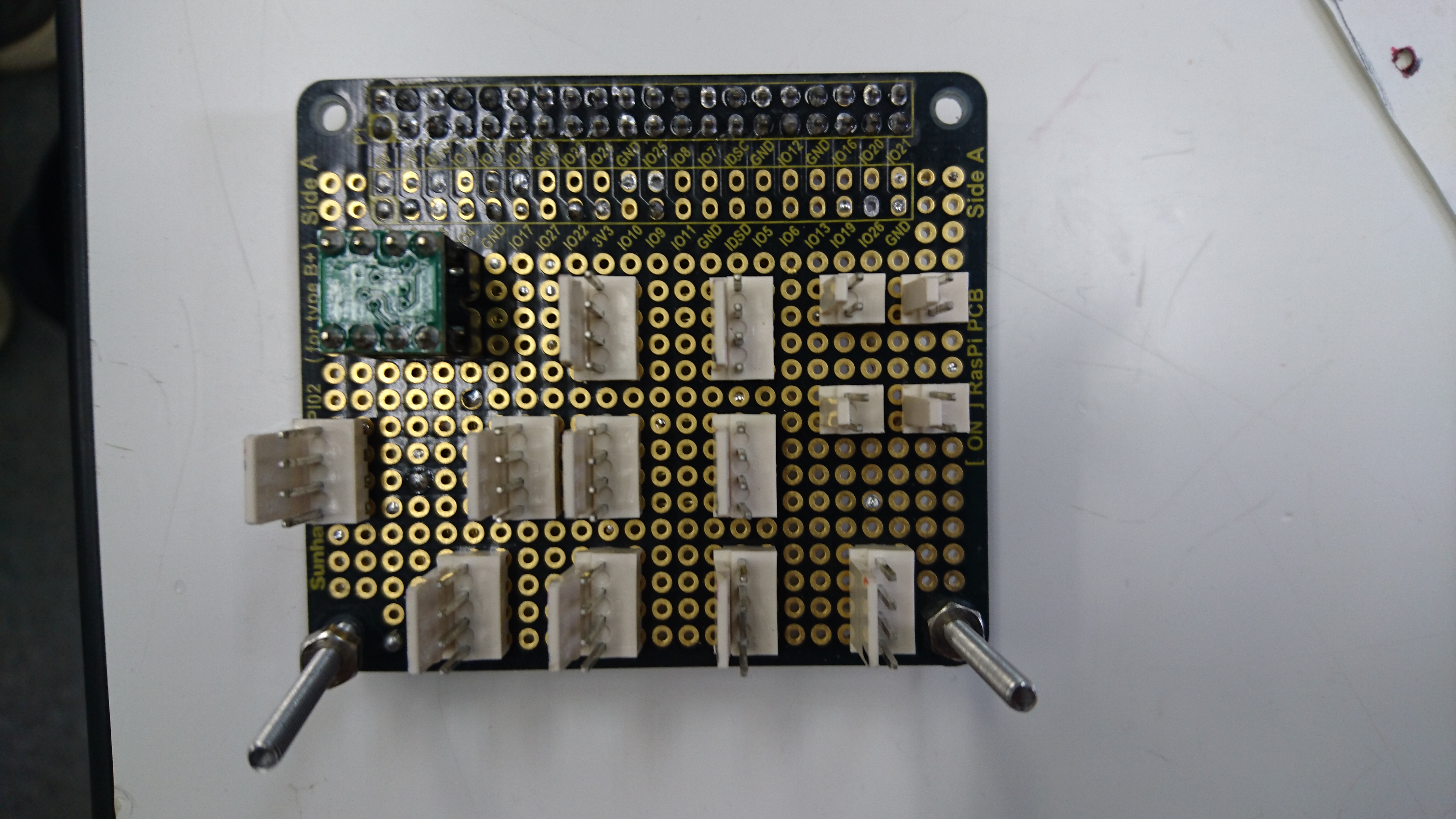
fig3:ラズベリーパイシールド実装図
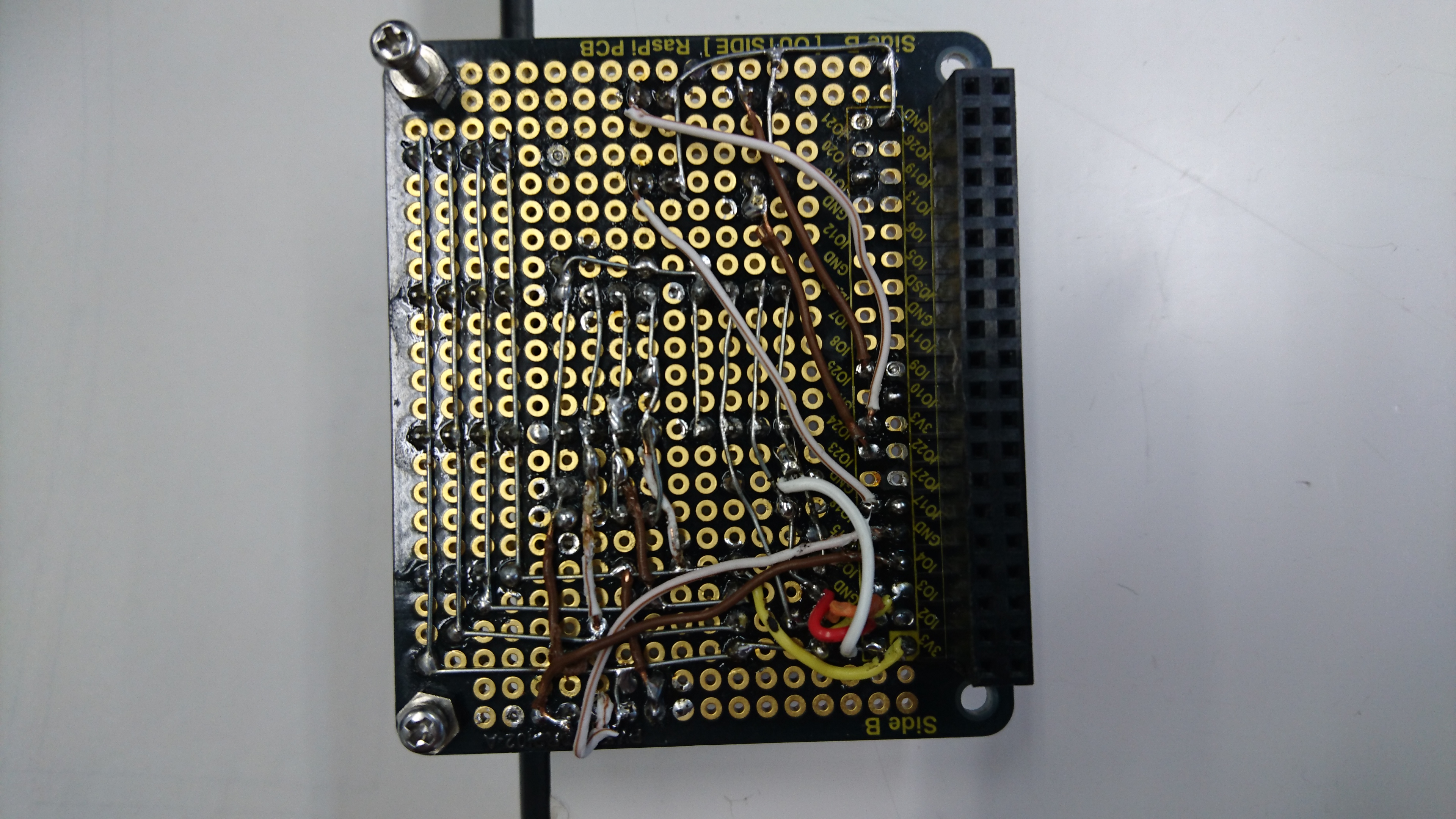
fig4:ラズベリーパイシールド配線図
Arduinoシールド
Arduinoシールドの改良点は2つある。
1つ目は高度センサをI2C接続するためにI2Cポートを新規作成する。この時、バッテリ電圧計測端子がA5になっているが、I2Cのポートと重なるためA1に移動した。
2つ目は非常停止ボタンを接続するためのポートをA3に新規作成する
実装時には、できる限りコードでごちゃごちゃしないように横向きのコネクタを用いるように心掛けた。
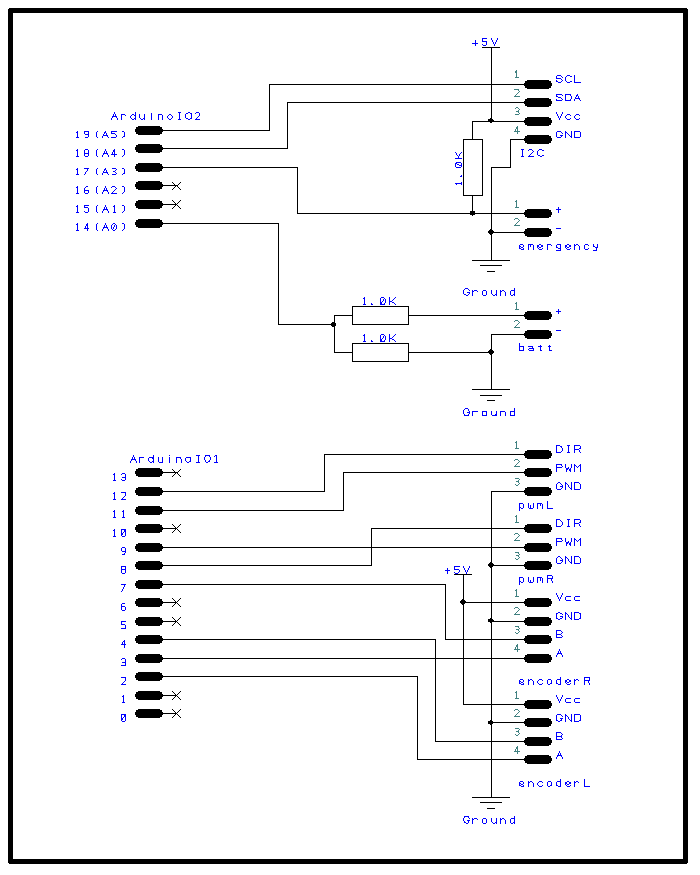
fig5:Arduinoシールド回路図
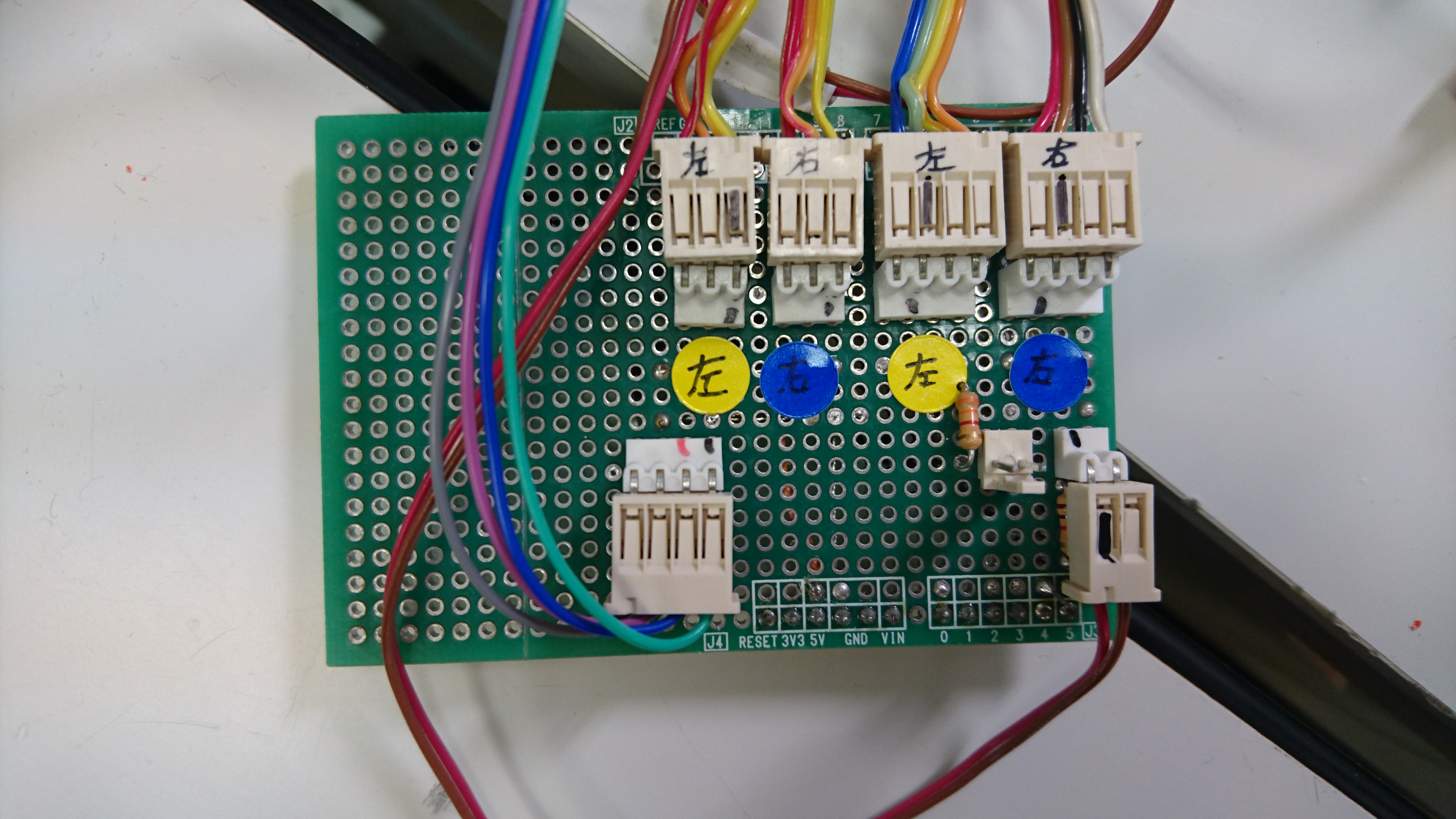
fig6:Arduinoシールド実装図
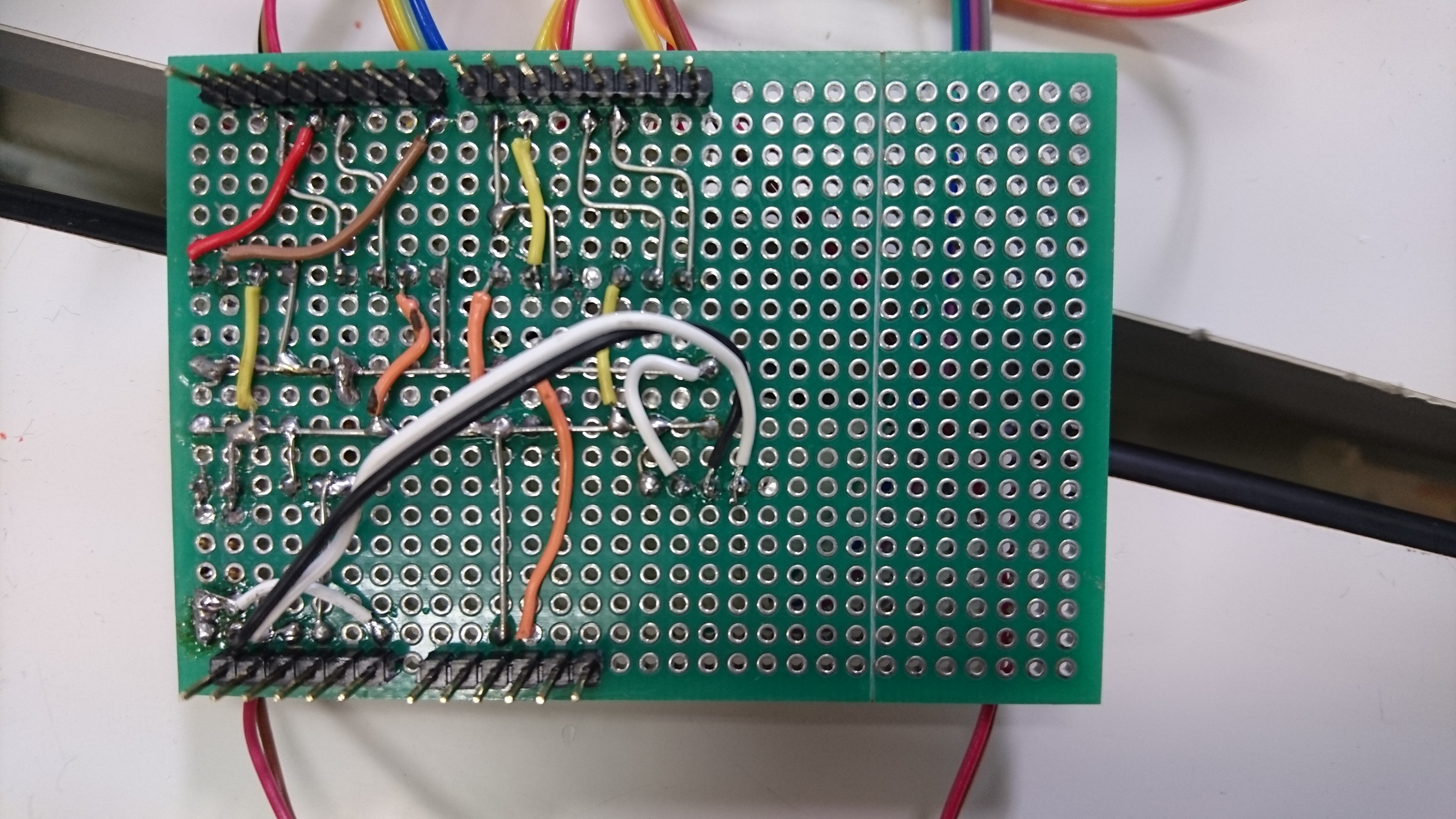
fig7:Arduinoシールド配線図
電源ボード
電源ボードはの改良点は3つある。
1つ目は標準のスイッチが小信号用で定格1mAのスイッチを用いているため、定格1Aのスイッチに付け替える。
2つ目はアンプの電源を取るためにコネクタを1つ増設する
3つ目は2つのモータードライバへの出力部がターミナル1つとなっていて、ケーブルの固定が甘く、配線ミスが起こりやすい。なので、2つのコネクタで2つのモータドライバに分配するように変更する。
実装時には、電源回路なので、はんだを多めに盛るようにした。
実装後に、ホットボンドでスイッチやコネクタの周りを固め、スイッチやコネクタが取れてしまうことを防止した。
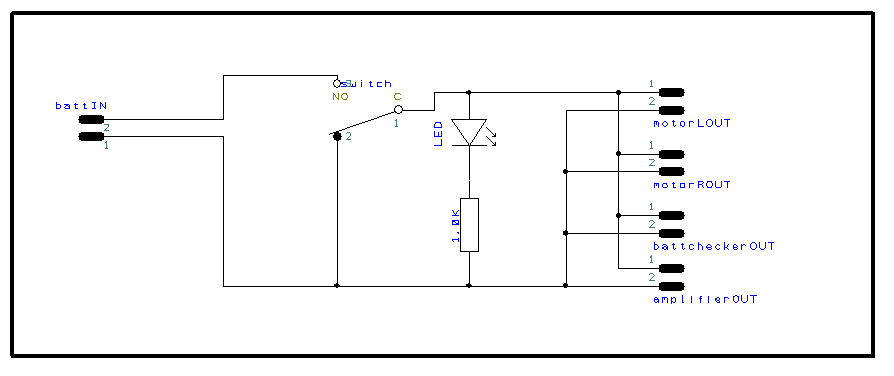
fig8:電源ボード回路図
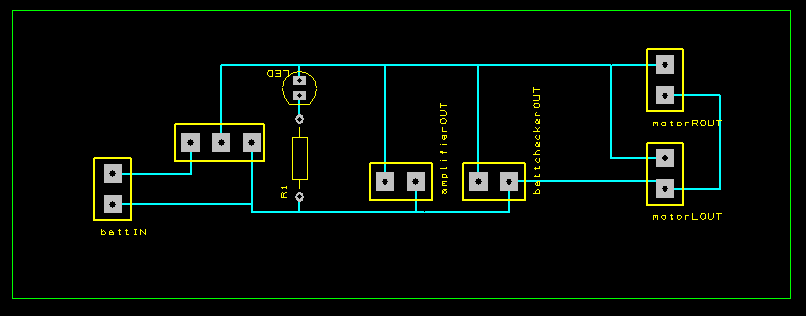
fig9:電源ボード配線図
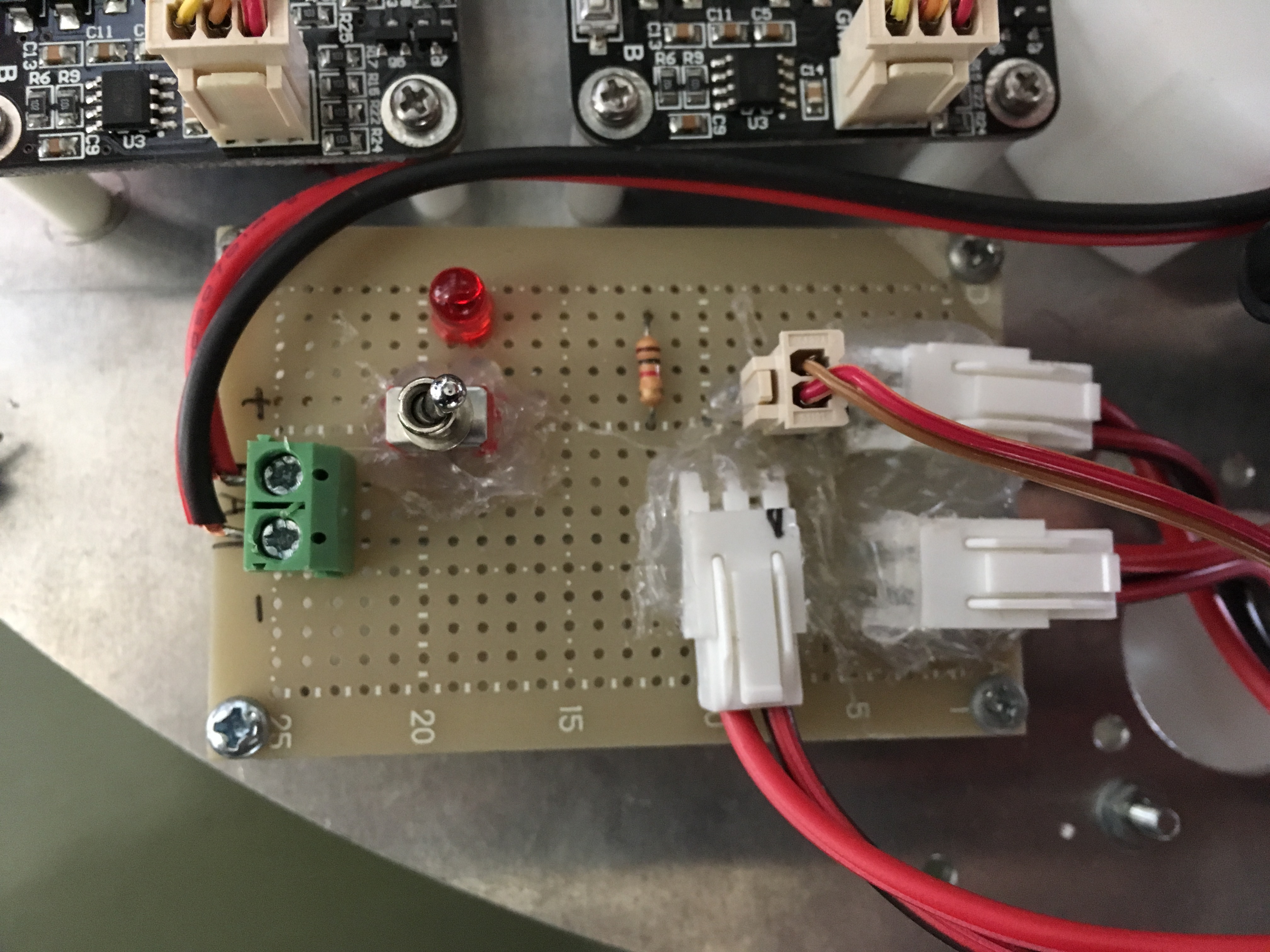
fig10:電源ボード実装図
アンプ
スピーカは0.5wでモノラルのものを用いることになった。(ジャンク)
そこで、モノラルで最大1W 程度出力可能で低価格かつコンパクトなアンプを探した結果、TA7368を用いたアンプに決定した。
また、今回はラズベリーパイのライン出力から音声をアンプに入力するので入力にステレオミニピンの端子を用いた。
ステレオミニピンは、通常ステレオなのでGNDとLとRの3つの信号線があるが、今回のスピーカはモノラルなので、LとRを一つにまとめて信号線とした。
アンプの完成した写真を以下に示す。
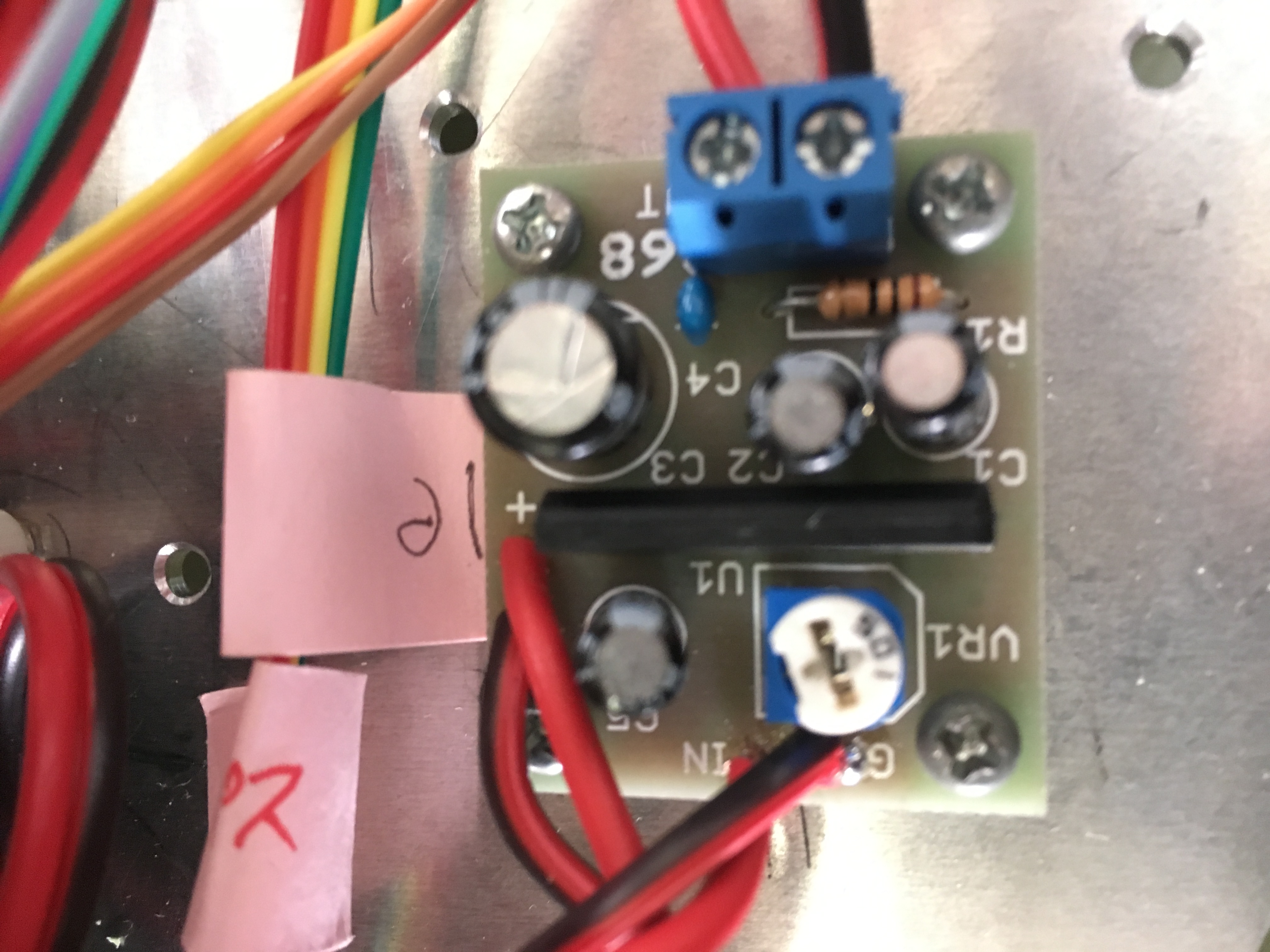
fig11:完成したアンプ
デジタルコンパス
今回は、センサーはソフト班の負担を減らすためにできる限りI2Cのセンサ用いることにした。
また、校内を案内するためには、ロボットが向いている方向や回転した角度などをしっかりと把握することが重要である。
なので、今回はI2C通信可能で低価格であるHMC5883Lのセンサを購入した。
このセンサはブレッドボード向けにDIP化されたものであったので、小さく切ったユニバーサル基板に乗せ、I2C通信に必要なピンのみ取り出した。
デジタルコンパスの完成した写真を以下に示す。
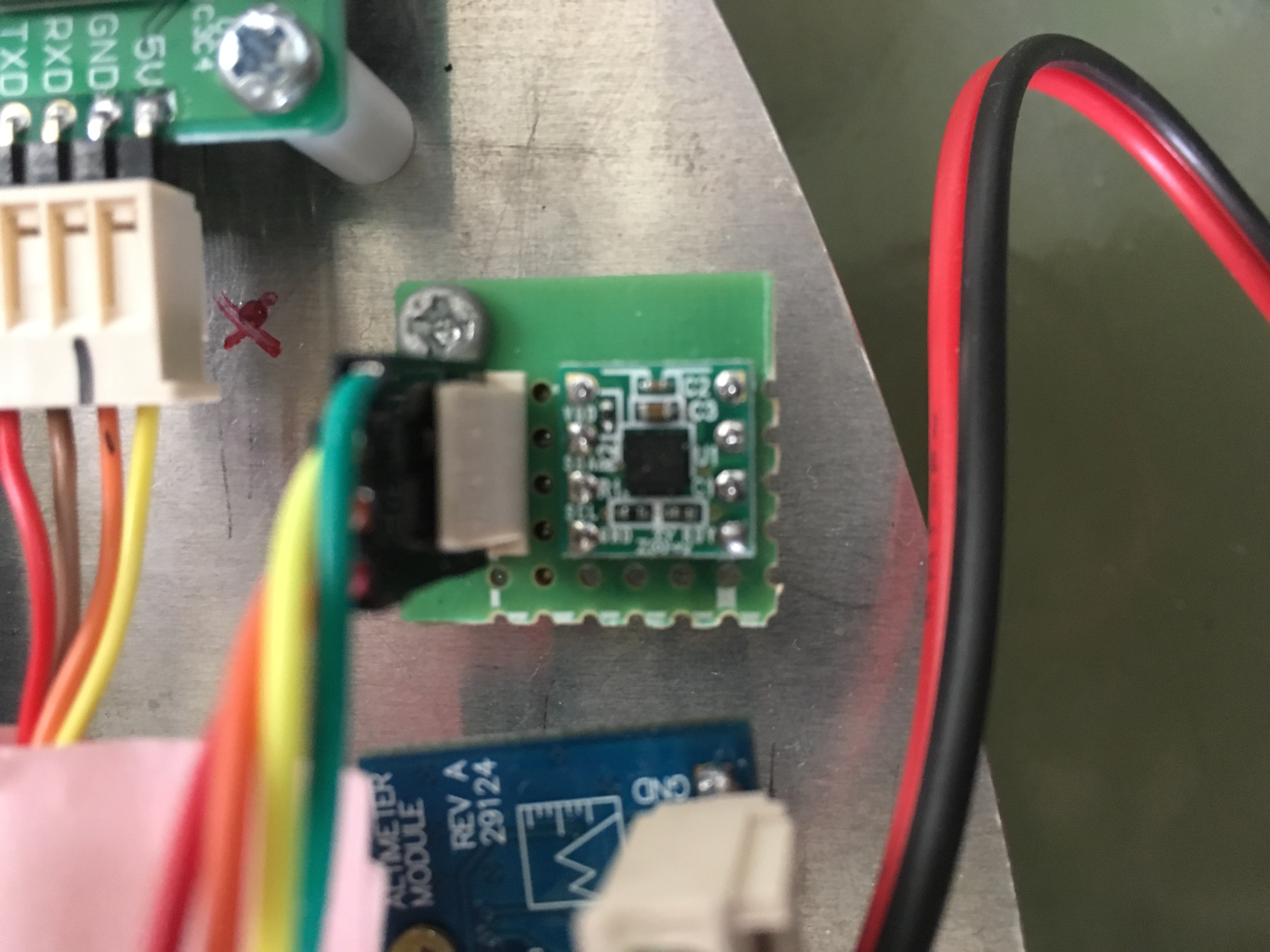
fig12:完成したデジタルコンパス
GPS
校内は広いため超音波センサや高度センサ、エンコーダだけでは十分な位置情報を得ることができない。なので、今回はGPSモジュールを搭載することにした。
現在のGPSは2mの精度となっているが、みちびきに対応されているGPSは2018年に数cmの誤差となる。
MIRSにもここまでの精度のあるGPSを搭載すれば、校内で教員の研究室に正確に案内することができるようになる
なので、今回はみちびきに対応したGPSモジュールを購入した。
しかし、みちびきに対応していて手軽なものではI2CのGPSモジュールはなかったので、このセンサのみURATとなってしまった。
GPSの完成した写真を以下に示す。
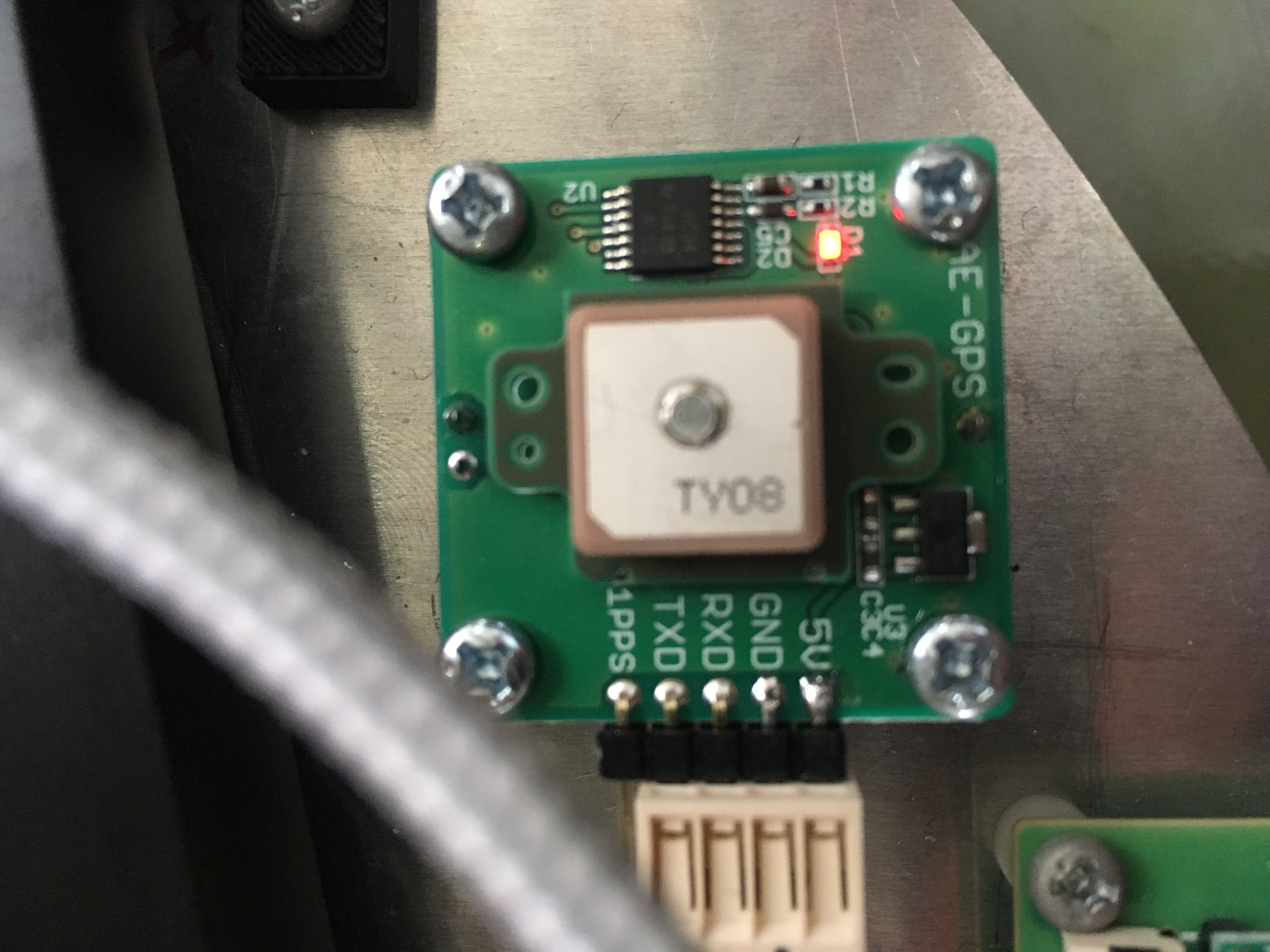
fig13:完成したGPS
高度センサ
今回のプロジェクトでは校内を案内することになっていて、2階や3階などへ行くことがある。なので、高度センサを導入し現在何階にいるのかを把握することができるようにすることにした。
高度を計測するには、相対的な気圧の変化を計測すればいい。そこで、様々な気圧センサを探したところ、多くは気圧の分解能が良くなく高度が約2m単位でしか得ることができなかった。
これでは、場合によっては正しく何階か判断することができないので困る。
なので比較的高価ではあったが、気圧の分解能良く、I2C通信ができ、最小20㎝まで計測できる高度センサを選定した。
高度センサの完成した写真を以下に示す。
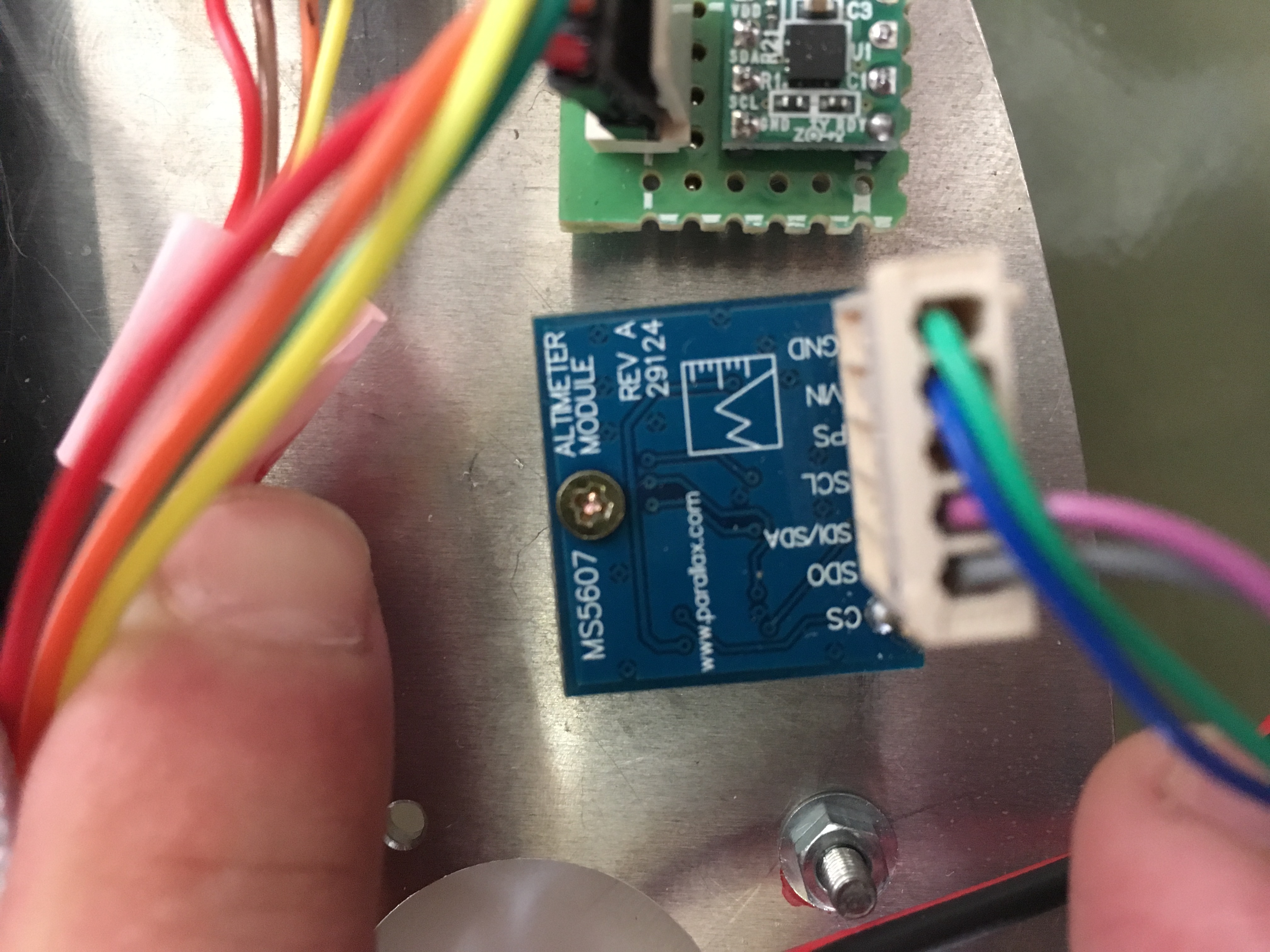
fig14:完成した高度センサ
超音波センサ
今回のプロジェクトでは自律走行をするときに周りの障害物や人などを検知しなければならない。
なので標準機は前方に2つであったが6方向(前・後・右・左・右前・左前)に超音波センサを搭載するとことにした。
様々なセンサを考慮したが、I2C通信であり既に使用していてソフト班にかかる手間も少ないので、標準機に搭載されている超音波センサを購入することとした。
タッチセンサ
今回のプロジェクトでは校内を自律走行することになっているので、超音波センサでは検知できないなかった人や物と衝突することがあるかもしれない。
なので、4方位(右前・左前・右後・左後)にタッチセンサとバンパーをつけ、機体の全周囲を覆うことで衝突を検知し、緊急停止できるようにした。
ジャンク品に、OMRONのリターンばね付きのスイッチがあったのでそれを用いることとした。