2.ルール
3.基本方針
4.戦略概要
5.動作流れ・基本動作仕様
6.作業工程
- Micro Intelligent Robot System(MIRS)
本ドキュメントに含まれる略称について
本ドキュメントでは以下に示す工学用語を()内の略称で示す。-
本ドキュメントは、9/3の一日体験入学に行う、プレ競技会に向けたもので、
標準機を用いてプレ競技用のシステム開発と競技「現場急行」に対する戦略について記述したドキュメントである。
このドキュメントを作成するにあたり、MIRS1604 の班員全員でミーティングを行い、方針を固めた上で作成した。
1.はじめに
-
9/3の一日体験入学で行われる、プレ競技会のルールは以下のリンクを参照する。
プレ競技会ルール
2.ルール
-
- 標準回転よりも速くゴールする。9秒切り
以上が私たちmirs1604のコンセプトである。
3.基本方針
コンセプト4.戦略概要
(自動車レースで、速くコーナリングする方法。コーナーの入り口では外側から入り、頂点で内側をかすめ、再び外側へ抜ける走法。)
(コーナーリングをせめる基本テクニックのひとつで、十分に減速してコーナーに入り(スローイン)、素早く出る(ファストアウト)こと。)
Fig.1に示しているのが目標とする走行の軌道である。Fig.1の①までは直進し、②で減速し左右のモーターの速度変更により、カーブをまわり、③からゴールを目指して直進する。
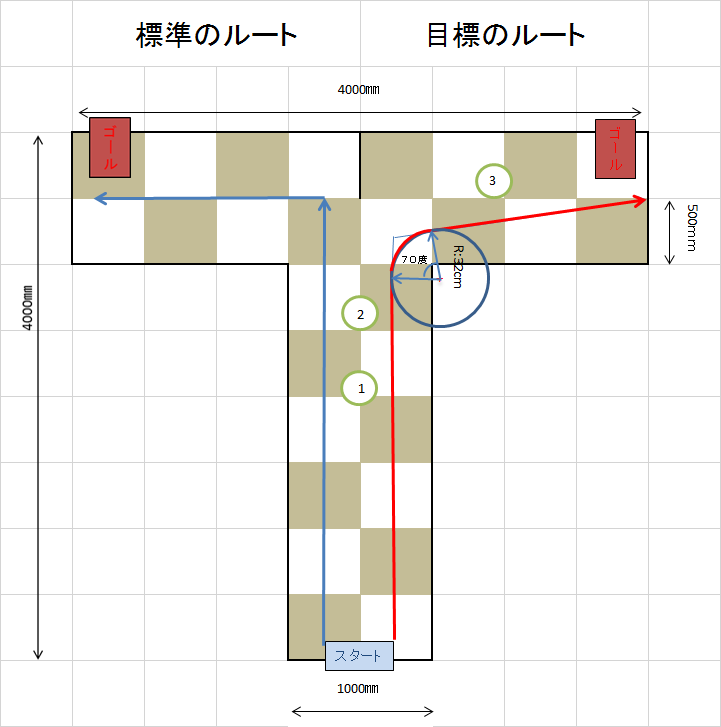
|
| Fig. 1 走行軌道図 |
-
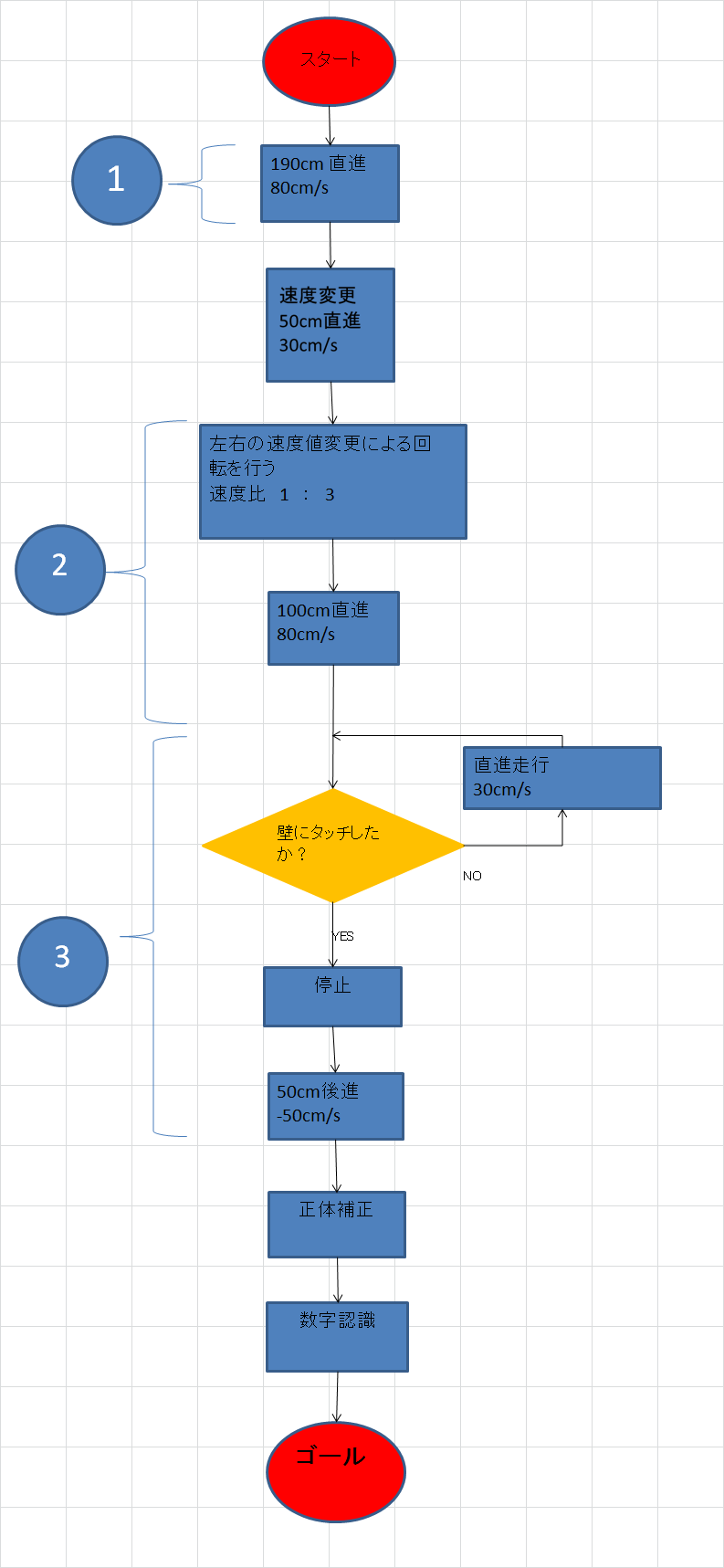
Fig.2 プログラム概要
プログラムの大まかなフローチャートをFig.2に示す。
曲がるまでの最初の直進は、2フェイズに分けられている。
-
- 直進走行を行う。
- 機体がカーブする前に減速をする。(スローイン)
タッチセンサにぶつかってからは、正体補正のときに超音波センサの値が読み取れるよう、後ろへ数十cm動いた後に正体補正をする。
その後OpenCVと超音波センサによる距離測定で画像認識をする。
-
5.動作流れ・基本動作仕様
-
Fig.3にMIRS1604の開発工程を示す。
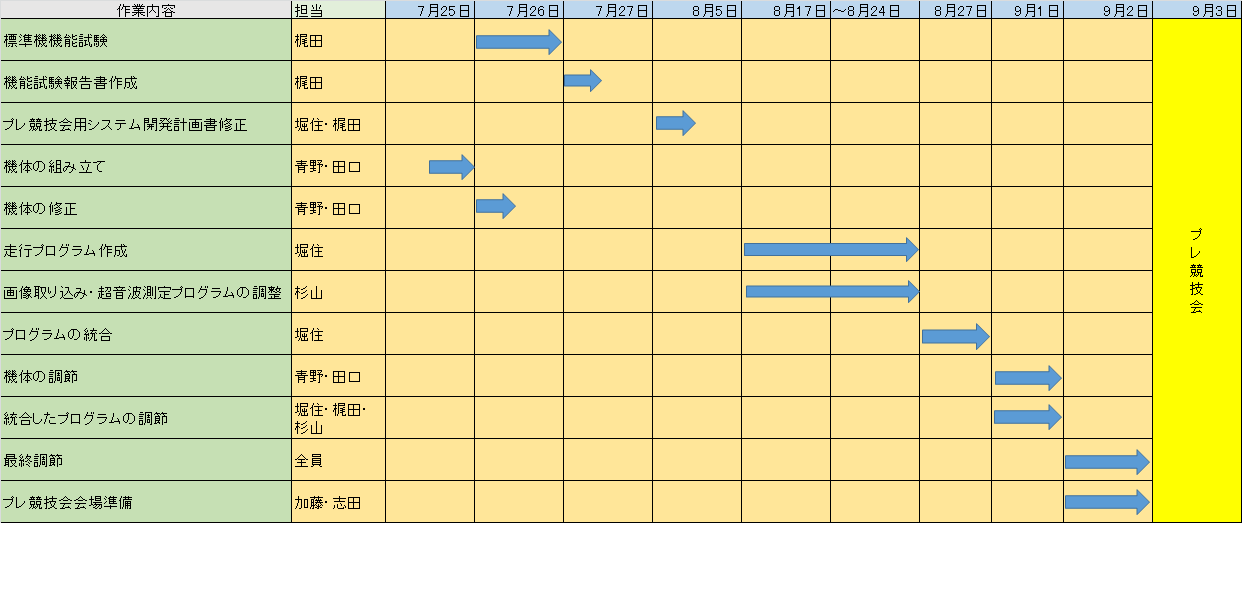
Fig.3 開発工程図
6.作業工程
MIRS DATABASE