・確実性
ゴール時以外の壁への接触は減点対象となる。そこで、直進走行のプログラムの調整を行い壁に当たらないような直進走行を実現する。
また、ゴール時に適切な減速動作を行うことによって、確実かつ安全に停止する。
・短時間でのゴールを目指す。
確実性の向上によりロスタイムを可能な限り減らし、短時間でのゴールを目指す。
・目標
①直進走行(4.5秒) ②回転(0.4秒) ③直進走行を(3秒)とする。
標準機能試験で80cm/sの走行が可能とされた。①直進走行の距離は350cmである。理論上4.375秒での走行が可能な為、加速の時間を加味し①の目標タイムを4.5秒と設定した。
回転走行では5回転するのに6.58秒かかった。競技での回転角度は90°であるため、理論上0.329秒で回転することができる。その為①のように加速を加味し目標値を0.4秒と設定した。
③も①直進走行と同じく80cm/sで計算をし、目標値を3秒と設定した。
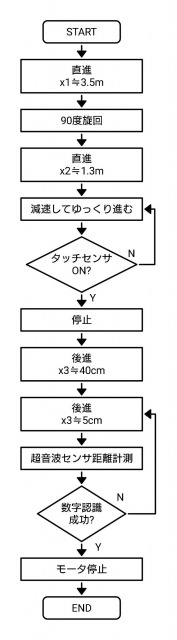
プレ競技会における動作の概要をFig.1に示す。
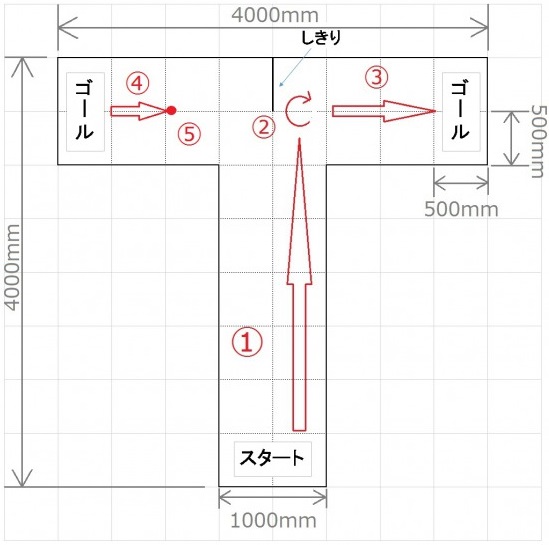
Fig.1:プレ競技会MIRS動作概要
数字認識ボードの位置をFig2に示す。
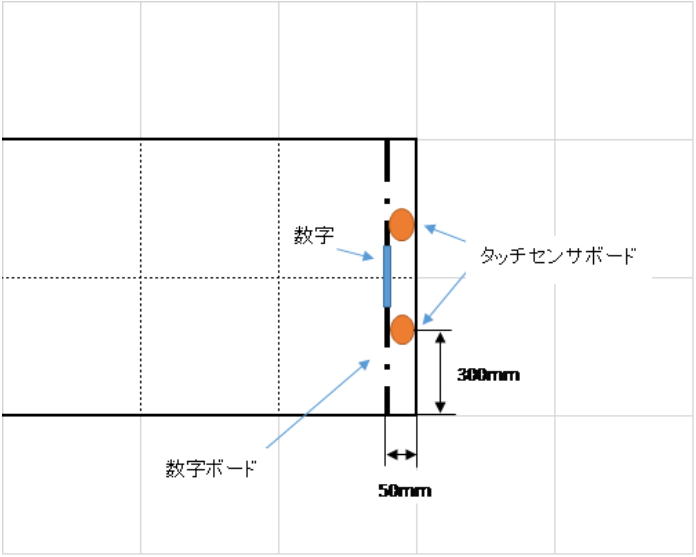
Fig.2:数字認識ボード
なお、Fig.1では右コートに、ゴールまでの動作(①から③まで)を、左コートにゴール後の文字認識動作(④から⑤まで)を示している。
開発日程(予定)を以下に示す。
Table2 開発日程
| 日付 |
作業内容 |
7/19(火)
授業時間内 |
・システム開発
・標準機能試験
|
| 7/21(木)まで |
・システム開発
・システム開発の修正
・標準機能試験
|
8/31(水)まで
夏休み期間中 |
・システム開発の修正
・動作確認
・動作確認後の修正
・システム調整
|
9/2(金)まで
体験入学準備日まで |
・プログラムの最終確認
・最終調整 |
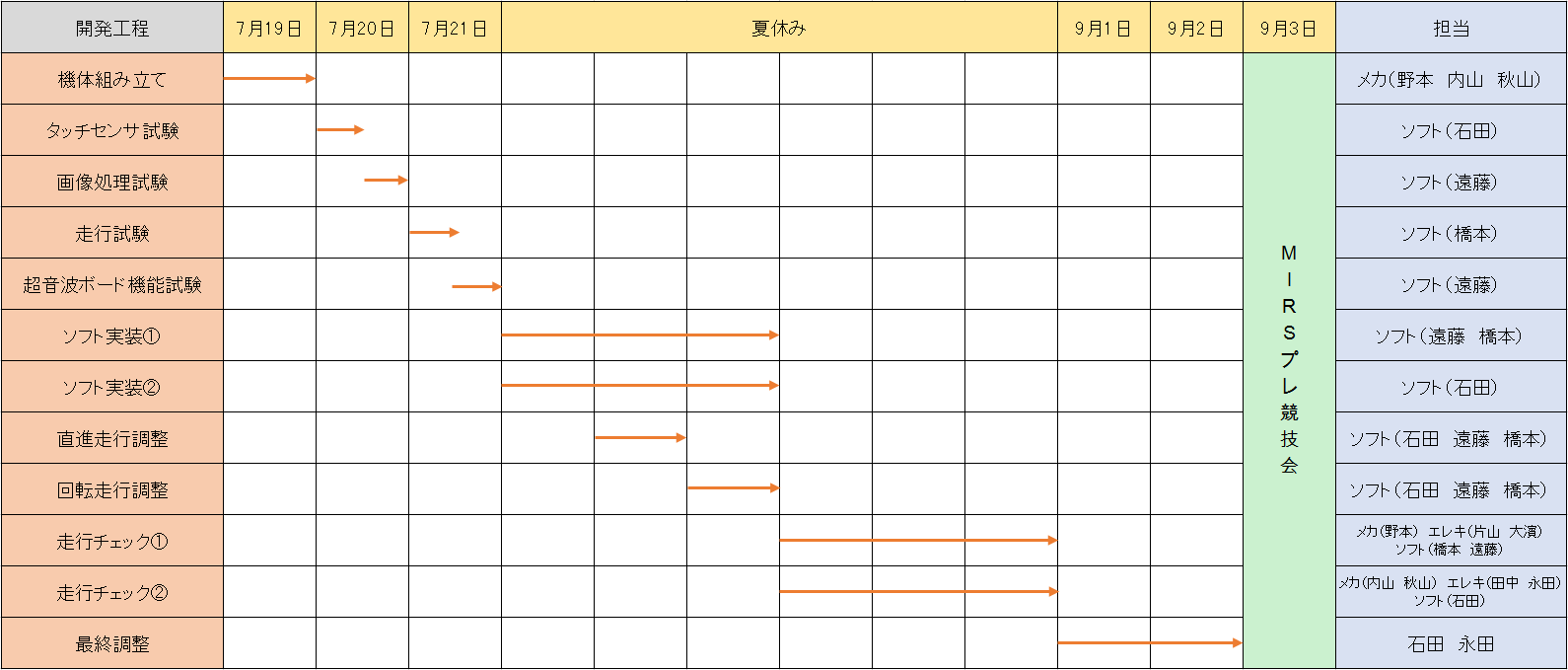
Fig.3:ガントチャート
また各工程の内容の詳細を以下に示す。
機体の組立て:標準機を組み立てる。
タッチセンサ試験:標準機でタッチセンサの機能試験を行う。
画像処理試験:標準機で文字認識を行うための画像処理に関する機能試験を行う。
走行試験:標準機で走行に関する機能試験を行う。
超音波ボード機能試験:標準機で超音波ボードの機能試験を行う。
ソフト実装①:前進、回転を組み合わせた、スタートからゴールまでの一連のプログラムを作成する。
ソフト実装②:前進、後退、画像処理を組み合わせた文字認識を行うプログラムも合わせて作成する。
直進走行調整:30cm/s,50cm/s,80cm/sで直進するよう、パラメータを調整する。
回転走行調整:30cm/s,50cm/sで指定した角度で回転するよう、パラメータを調整する。
走行チェック①:練習用フィールドでソフト①のプログラムで正確にゴールできるよう、パラメータを調整する(走行速度は30cm/s,50cm/sで調整)。合わせて数字認識が正確にできる距離、また数字認識が失敗した場合に再度数字認識をするために後退する距離を調整する。
走行チェック②:練習用フィールドでソフト②のプログラムで正確にゴールできるよう、パラメータを調整する(走行速度は30cm/s,50cm/sで調整)。
最終調整:練習用フィールドで一連の流れをチェックし、不具合があれば調整する。