MIRS1602は一回戦のMIRS1603戦でスタートで遅れてしまい敗退(本チームMIRSのゴールタイムは9.85秒)、三位決定戦では本チームのMIRSが8.05秒で
ゴールしMIRS1604に勝利を収めた。(なお、ゴールの壁に強くぶつかってしまったため、+5秒のペナルティを科せられ結果としては13.05秒となった)
また、二回の試合の両方ともゴール地点の数字認識を行うことができなかった。
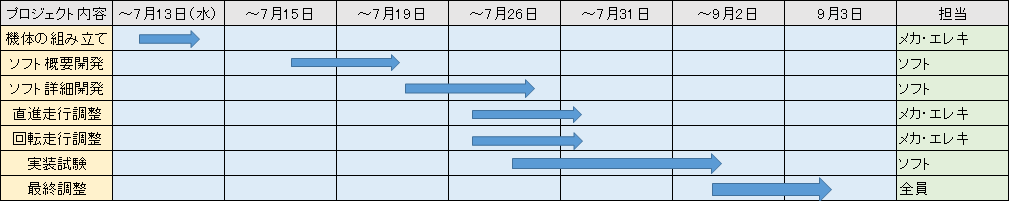
開発プロセスをメカ、エレキ、ソフト班に別れ、必要とあれば上記の日程を参考にし各々分析を行う。
結果・希望に対してできたこと/できなかったこと
メカ
できたこと: 精度の高い加工ができたこと。
できなかったこと: 組み立てたときのことをよく考えなかったため、実際に組み立てたときにモータ制御ボードが干渉してしまったため、保守性が低下してしまったこと。
できなかったこと: 組み立てたときのことをよく考えなかったため、実際に組み立てたときにモータ制御ボードが干渉してしまったため、保守性が低下してしまったこと。
エレキ
できたこと: 部品・機能試験ともに予定よりも遅れたもののすべての部品・機能を合格にすることができたこと。
部品の問題点を発見し、解決することができたこと。
できなかったこと: 部品(ボード、モータ、etc)の事ばかりに気をとられ、メカ・ソフトの人間と連携が取れなかったこと。
部品の問題点を発見し、解決することができたこと。
できなかったこと: 部品(ボード、モータ、etc)の事ばかりに気をとられ、メカ・ソフトの人間と連携が取れなかったこと。
ソフト
できたこと: 戦略どおり一時停止をせずにカーブを曲がるようにできたこと。
走行体が目的どおりゴールできるようにしたこと。
できなかったこと: プログラム上でのタッチセンサの割り込み。
ゲイン調整不足による、安定した直進走行ができなかったこと。
走行体が目的どおりゴールできるようにしたこと。
できなかったこと: プログラム上でのタッチセンサの割り込み。
ゲイン調整不足による、安定した直進走行ができなかったこと。
メカ、エレキ、ソフト間の連携がうまくとれず、夏休み中などの班員が集合すべきときなどに必要な人員が確保できなかった。
加藤誠基
エレキとしての仕事はあまり多くなかったが試験中の断線,短絡等への対処は迅速に行えたと思う。エレキの仕事だけでなくソフトの手伝いも行うことができたのでよかったと思う。
昨年の優勝チームはエレキにかける時間が多かったことなどから,後期はもっとしっかりエレキに力を入れたいと思う。
手始めにバッテリーの端子の交換を実行しようと考えている。
今野瑶心
今回私は、メカ班として旋盤で支柱を作った。2年生ぶりの旋盤では使い方やサイズの測定にとても苦労し思った以上に時間がかかってしまった。またプロジェクトリーダーとしては、どこにLEDを付けたら一番都合が良いのか試行錯誤を繰り返した。しかし、あまり班に貢献することはできなかった。
全体の反省点としては、班員同士で仕事の役割分担をすることがなかったので後期はもっと班員同士で協力していきたい。
伊東大輔
ソフトウェア、機体の調整においてゲイン調整による走行の安定化の重要性を痛感した。設計したカーブの為にも安定した走行を行えるよう調整したい。
ソフトウェア以外にも回路の調整等自分での機体調整を行いたい。
岩田啓吾
メカの仕事はこなせたと思うが、最低限の事しかできておらず、リーダーには迷惑をかけたと思う。夏休み中は行っても何をすれば良いのかわからず、本当に雑用くらいしかできず、夏休み後はソフトの人たちに任せきりだったので、
後期はメカの仕事をしっかりとこなした上で、他の事も手伝えることがあればしっかりと、コミュニケーションを取り、頑張りたい。
臼井達也
カーブ走行時にとまらずに走行するプログラムは作成できた。しかしシステム計画の時点でのサイクロイドの軌道走行はできなかった。また、直進走行の安定性がまだまだ足りていないと感じた。
清水香樹
前期はエレキとしての仕事(モータ制御ボードの作成等)を一生懸命できたのでよかったが、仕事が無かったとはいえ、夏休み中に4度しか学校に来なかったのは今思えばたるんでいたなと思う。後期ではソフト班、メカ班の要望に応えてエレキとしての
仕事に取り組みたい。
鈴木昭義
エレキとしてドータボードの試験を行った。試験において波形を見る際にFPGAボードのピンに不具合があり、正しい信号がドータボードに送られてこなかった。ピン配置を変更することにより正しい波形が出るようになった。また使えないタッチセンサも含まれていたり、対応するポートごとに対応するタッチセンサがあることが分かり試験上で問題になった。
また機体組み立てにおいて上段部分を組み立てた。各ボードを組み立てていく際に仕様書とシャーシの穴の位置が違っておりボードがうまくはまらなかった。
そのためシャーシに穴を開け直し仕様書とは違うがボードがうまくはまるようにした。
プレ協議会においては協議会用のプレゼンテーションを作った。
協議会中はソフト班がプログラミングによりパラメータを決定している時はあまり手伝うことができなかったので申し訳なかった。
鍋島大夢
機体を組み立てるときにシャーシの穴が必要なところにあいていなかったので組み立てるのに苦労した。旋盤の使い方が忘れていたところがあり、旋盤で加工して支柱(小)を作るのに時間がかなりかかってしまった。
スライドを作り発表をしたが発表はPCを見てばかりで上手くできなかった。早く慣れて改善したい。
日原究
メカとしての仕事はできた。しかし内容は少量であり他の手伝いをすべきだったが自分から手伝いにいけなかった。特に夏休み中は一週間以上学校にいったが、何をすればいいのかわからずバッテリーの充電しかできなかった。
後期はメカは今までどおりにやることをこなして、他の部門にはもっと積極的に参加して手伝っていきたい。
また、班員ともっとコミュニケーションをとって何をすればいいのかしっかりと聞いてやっていきたい。
山内菜摘
カーブ走行の実装ができてよかったが,計画通りの走行とは違ったのが惜しい。調整を重ねる中でMIRSが想定外の動きをした原因がわからなかった。パラメータ調整でも初期位置によって走行が変わってしまうことがわかった。
プレ競技会でのMIRSの走行の様子などからうまくいかなかった原因と思われる箇所の修正をしていきたい。
ソフトの方では戦略通りの走行や機能が実装できるよう,班員と協力して作業を進めていきたい。
プレ競技会用プログラム
このプログラムは次の項目を目標として設計したものである。
・スタート時の速度を速くし、リードを奪う。
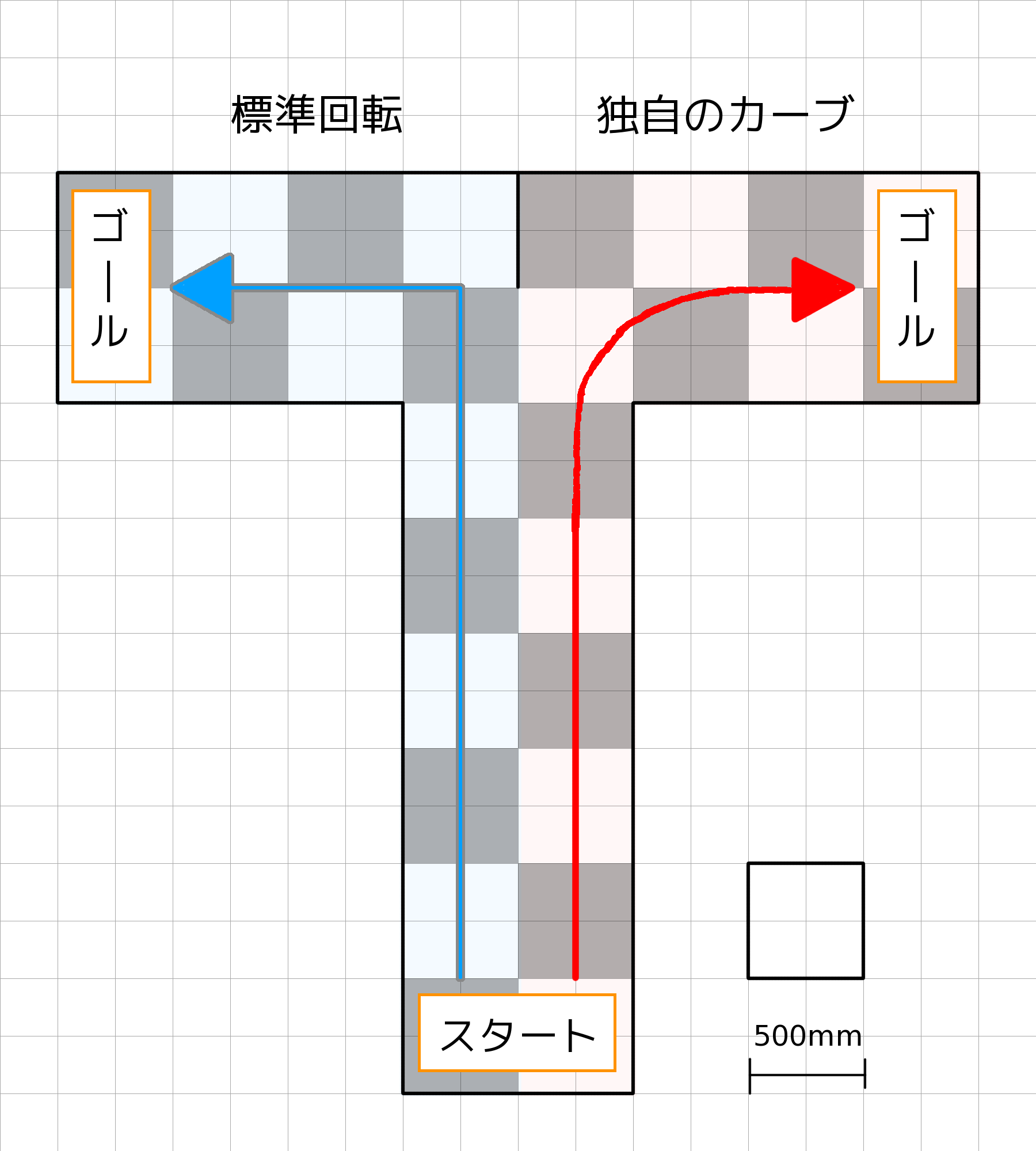
・カーブでのタイムロスをなくすため、カーブを曲がるときはサイクロイドの軌道を描き走行する。
走行中の写真を以下に示す。(この写真はプレ競技会中の走行の様子である)
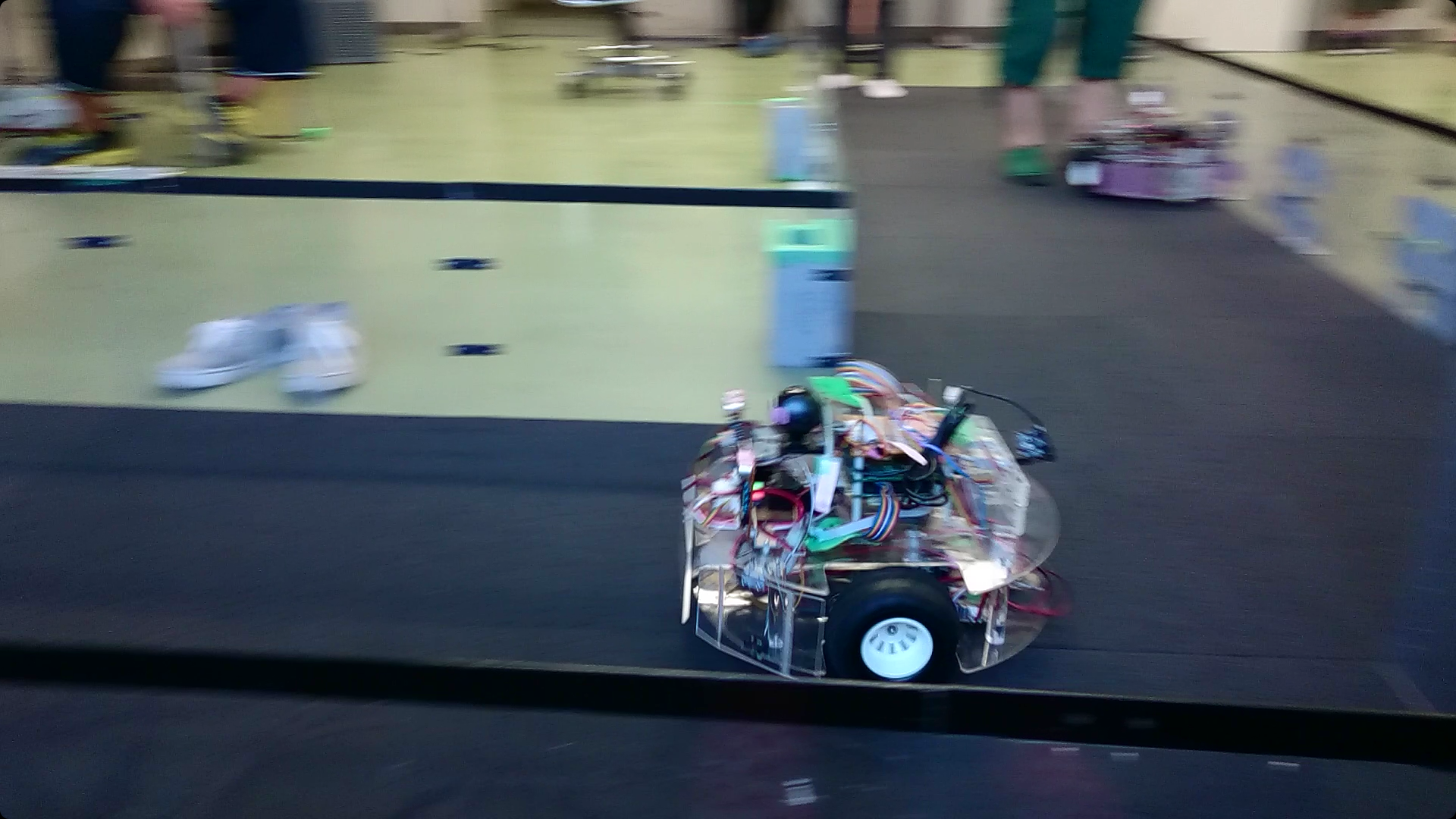
なお、このプログラムによるカーブをfig.2として以下に示す。
また、今回のプログラムの内容をフローチャートとして以下に示す。
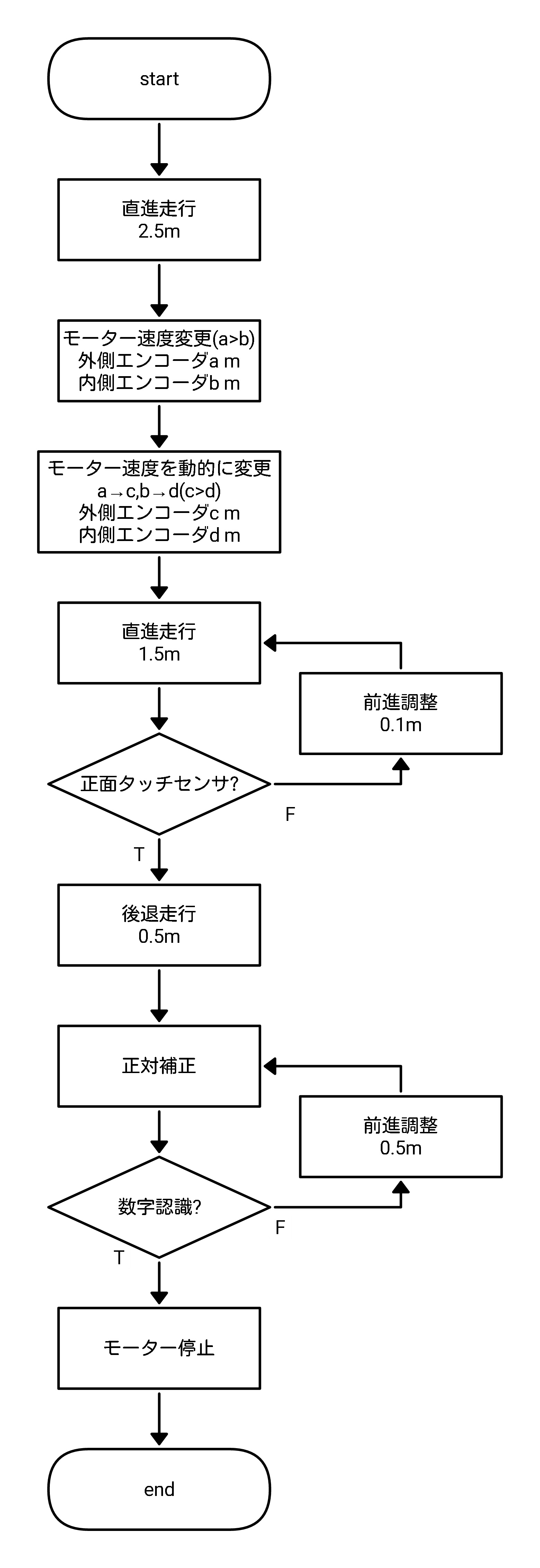
・接触判断にタッチセンサを使わず、距離指定で走行させたため、直進走行がうまくいかないと壁に激突してしまった点。
エレキ
前期では走行体の制御のすべてをプログラムに任せていたため、後期では走行体の問題・疑問解決、また、走行体を理想とする動きに近づける場合は、ボード・配線をプログラムや理想に合わせたものに取り替える事が
できるようにする。
ソフト
プログラムの構成やコメントをもっとわかりやすいようにし、開発の質を向上させる。外乱の影響があっても、安定した動作を実現できるようにする。
メカ
部品・ボードが互いに干渉しないようにシャーシや柱を新調する。独創性のある機体を製作する。