MIRS1602班は
現場急行を5秒で行い、数字認識から怪盗確保までを35秒以内で行うことを目標とする
この目標を実現するためにチームコンセプトは
怪(怪盗機)・即(ただちに)・捕(捕獲)
とする。
<補足>黒雀蜂(クロスズメバチ)とはスズメバチの中でも小型であり、体が黒いハチである。
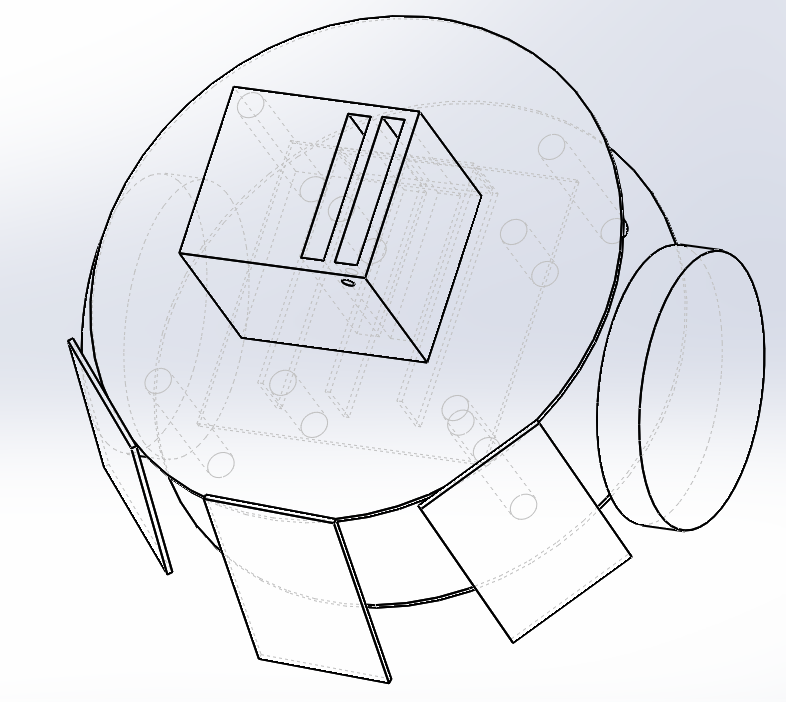
小型化
素早く捕まえる
華やかに
| 名称 | MIRS1602 システム提案書 |
|---|---|
| 番号 | MIRS1602-DSGN-0001 |
最終更新日:2016.10.12
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2016.10.12 | 清水香樹 岩田啓吾 | 大林先生 | 初版 |
| A02 | 2016.10.21 | 臼井達也 | 大林先生 | 指摘箇所の訂正 |
MIRS1602班は
<補足>黒雀蜂(クロスズメバチ)とはスズメバチの中でも小型であり、体が黒いハチである。
| 変更箇所 | 変更内容 | 変更理由 |
|---|---|---|
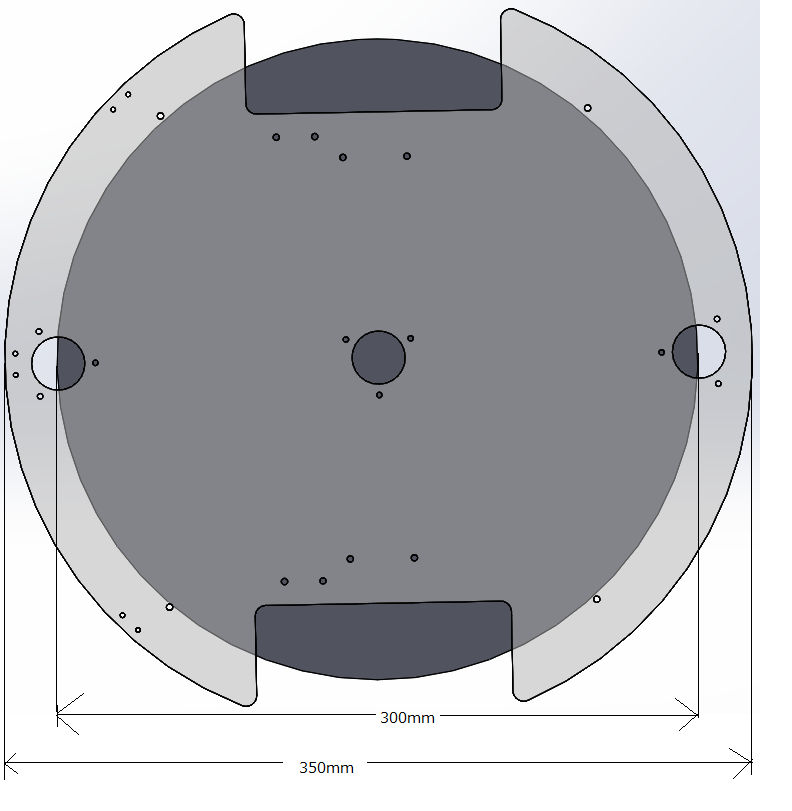
| シャーシ上下 | シャーシ上下大きさ350[mm]を300[mm]に変更 | 機体のサイズを小さくし、機動性の向上を図るため。 |
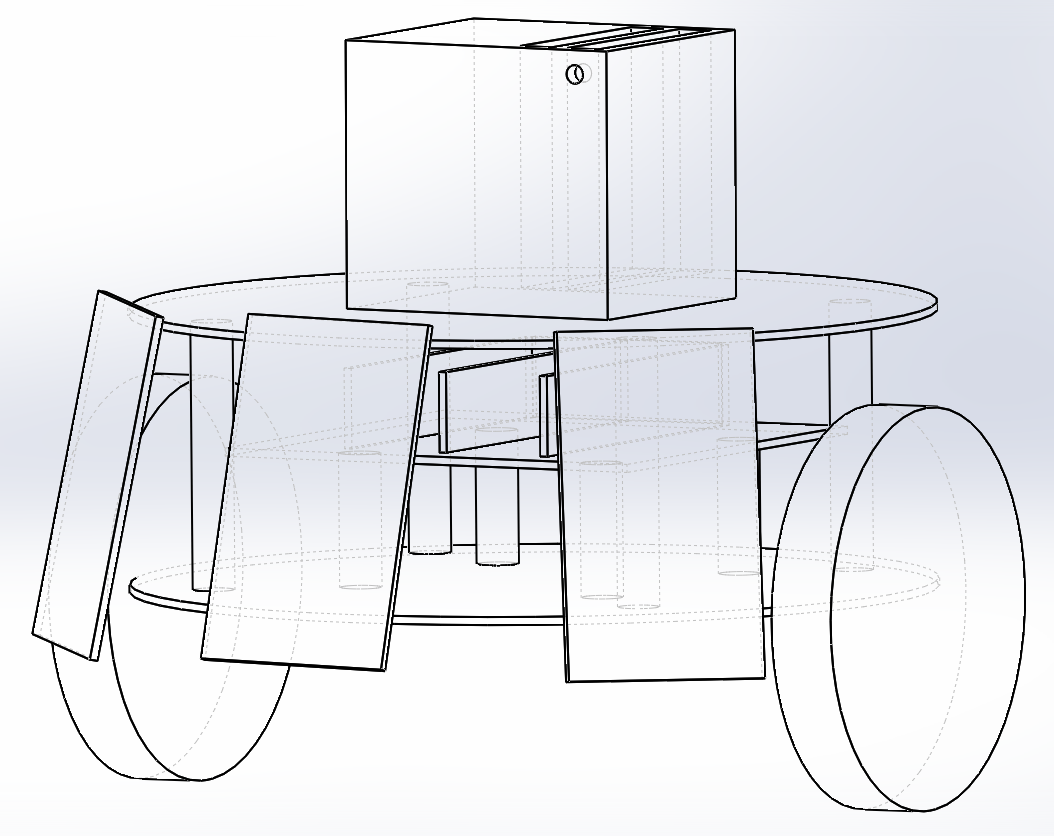
| 左右タイヤ | タイヤを木製に変更する。 | タイヤがゴム製の場合、凹みなどが生じるため、木製に変更することでタイヤの変形を阻害するため。 |
| 外装 | コンセプト「黒雀蜂」に伴った外装にする。 | 見た目からコンセプトを連想させるため。 |
| 電子コンパス | 電子コンパスを新規に用いる。 | 怪盗を追跡して見失ったときに巡回コースに速やかに戻れるようにするため。 |
| 超音波センサ | 機体の前方に二つ、左右に一つずつ設置する。 | 障害物を検知し、衝突を回避するため。 |
| 赤外線センサ | 機体の左右前後方に一つずつ赤外線船センサを設置する。 | 怪盗機を発見させるため。 |
| 変更箇所 | 変更内容 | 変更理由 |
|---|---|---|
| 左右モータ | 高出力のモータ(昨年MIRS1503が使用していたモータ)に変更。 | モータの出力を上げるため。 |
| モータ制御ボード | 新規のモータの特性に合わせた実装にする。 | 高出力のモータの特性に合わせるため。 回路上のVCCおよびGND部分を太くすることで、大きな電流が流れても問題がないように改良する。 |
| 電源ボード | 新規モータ制御ボードに合わせた実装にする。 | 現存の電源ボードでは端子のソケットの方向が新規モータ制御ボードとかみ合わないため。 |
| 信号制御ボード | 新規 | 赤外線センサおよび電子コンパス実装のため。 |
| 超音波センサボード | 不良箇所の修正 | 超音波センサを増設するため。 |
| バッテリー端子 | 現存のコネクタからT型端子に取り替える。 | 現存のコネクタでは接触不良の起きる可能性が高いため。 |
| 追加要因 | 内容 |
|---|---|
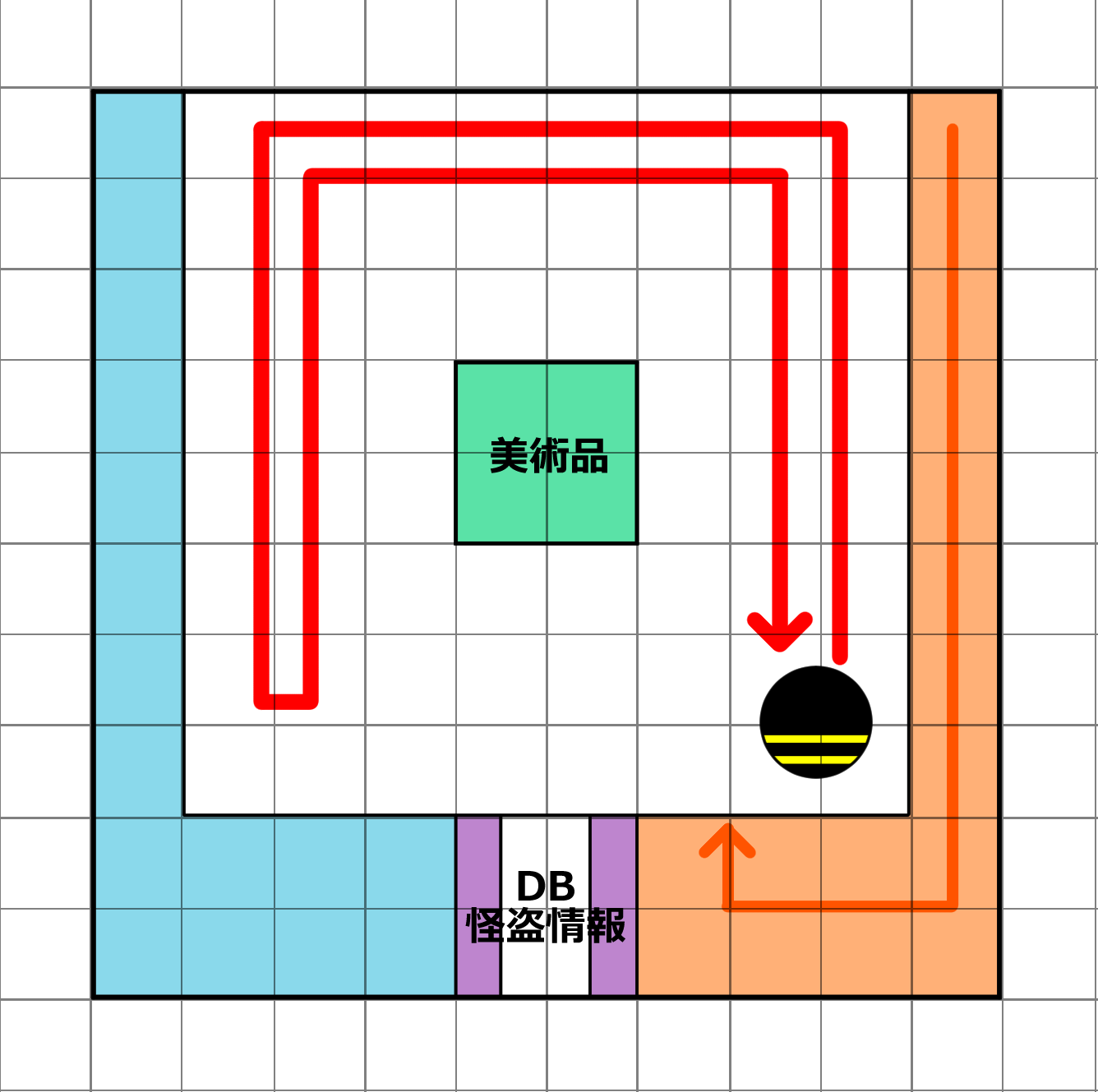
| 巡回に関するプログラム | 現場急行後、ステージの壁沿いに時計回りをし、相手機体の入り口付近まで来たら 内側(美術品周り)を反時計回りに巡回させる。(Fig1参照) |
| 怪盗機発見後のプログラム | 怪盗機発見後、怪盗機の方向へ突進。怪盗機を見失った場合、その場から外側巡回コースに移動。 巡回を開始。 |
| 障害物衝突阻止に関するプログラム | 超音波センサで障害物を検知し、その障害物に衝突しないように行動させる。 |
| 怪盗機検知に関するプログラム | 巡回中、怪盗機を検知(赤外線、カメラ)した場合、巡回と中断し、怪盗機捕獲に移行する。 |
| 購入予定物品名 | 個数 | 用途 | 購入先 |
|---|---|---|---|
| まな板(木製)またはベニヤ板 | 2 | タイヤ製作の際の材料 | ホームセンター |
| T型 コネクタ 2P オス/メス | 6 | 端子の取替えのため | 千石電商 |
| アクリル板 | 1~2 | シャーシ製作のため | 未定 |