はじめに
本ドキュメントは9月3日に行われる1日体験入学でのデモのため、
標準機を用いて競技をクリアするための戦略やプログラム設計、開発工程について記したドキュメントである。
このドキュメントを作成するにあたり、MIRS1601の班員全員でミーティングを行い、方針を固めた上で作成した。
競技概要
競技会の詳細は下記のドキュメントに記載されている。
・参考ドキュメントMIRS2016プレ競技会ルール
基本方針
○コンセプト
・第一に安定性を追求する。その上で速度を出す。
・超信地旋回で正確にカーブを曲がる。
・ゴールの壁にソフトタッチすることで減点を確実にゼロにする。
以上が私たちmirs1601のコンセプトである。
戦略概要
・壁や相手機体にぶつからないように直進制御の精度を上げる。
・機体の直進速度を1000mm/sに近づけて素早くカーブまでたどり着く。
・カーブでは正確に曲がることを考慮し、その場での旋回を採用する。
・ソフト開発に余裕があれば、円弧を描く回転方法を導入する。
・ゴールのタッチセンサーに触れた後、素早く後進し数字認識に移行する。
・直進と90度旋回を同時進行で行い、円弧カーブは直進と旋回が十分に作成できてから手がける。
・円弧カーブの概要と通常の直進と旋回の比較を以下のfig.1に示す。
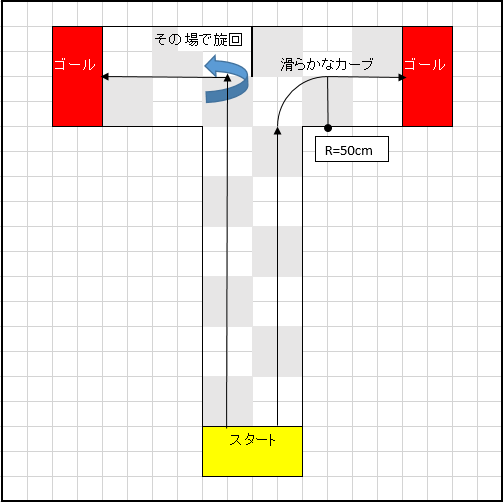
Fig.1 曲がりの変更点
動作の流れ
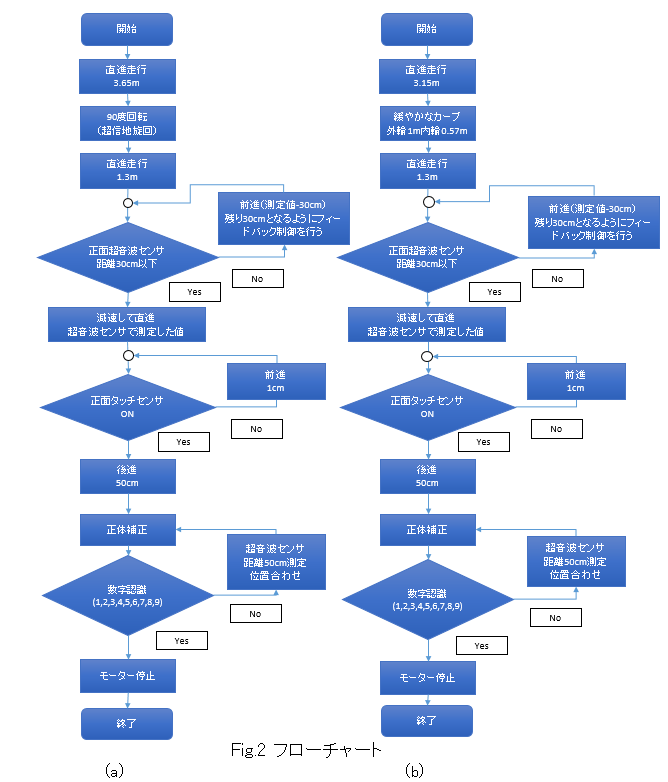
プログラムの大まかなフローチャートをFig.2に示す
(a)は直進と回転のフローチャートである。
(b)は円弧カーブのフローチャートである。
ここで示している長さは、エンコーダが読み取っている距離である。
円弧カーブでの左右モーターの速度変更は、機能試験の際に行い、決定をする。
カーブする際のエンコーダ値の計算は以下の通りである。
(0.5±0.14)*2*π*0.25で導出をした。
機能詳細
標準プログラムを用いて機能を作成していく。
以下に標準プログラムの機能から変更する関数名を記す。
数値認識
関数名 : read_value正体補正
関数名 : direction_correction距離計測
関数名 : measure_distance
引数 : 壁に対する距離
返り値 : 認識した数値
ROI走査法を用いて、DBの数値を認識し、その値を返す関数である。
壁に対する距離は、あらかじめ決定した定数を代入する。
認識する数値は1個、また数字の1を認識することを想定しない。
引数 : 目標距離[cm]
返り値 : 成功判定
機体前方の2個の超音波センサを用いて正体補正を行う関数である。
成功判定は、成功ならば1を返し、失敗ならば-1を返す。
引数 : 無し
返り値 : 壁に対する距離
機体前方の2個の超音波センサを用いて距離測定を行う関数である。
返り値は、左右の超音波センサの取得値の相加平均をとる。
開発工程
ソフトのデバック
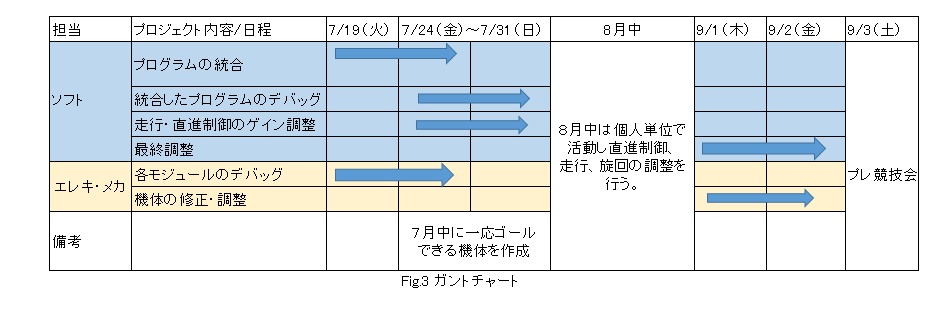
またプロジェクト内容の詳細を以下に示す。
機体の組立て:標準機を組み立てる。
超音波センサ機能試験:標準機で再度超音波センサの機能試験を行う。
ソフト実装①:直進・回転を組み合わせた、スタートからゴールまでの一連のプログラムを作成する。また数字認識を行うプログラムも合わせて作成する。
ソフト実装②:円弧カーブを用いた、スタートからゴールまでの一連のプログラムを設計する。
直進走行調整:30cm/s,50cm/sで直進するよう、パラメータを調整する。(機能試験)
回転走行調整:30cm/s,50cm/sで指定した角度で回転するよう、パラメータを調整する。(機能試験)
ソフト①の走行チェック:練習用フィールドでソフト①のプログラムで正確にゴールできるよう、パラメータを調整する(走行速度は30cm/s,50cm/sで調整)。合わせて数字認識が正確にできる距離、また数字認識が失敗した場合に再度数字認識をするために後退する距離を調整する。
ソフト②の走行チェック:練習用フィールドでソフト②のプログラムで正確にゴールできるよう、パラメータを調整する(走行速度は30cm/s,50cm/sで調整)。
最終調整:練習用フィールドで一連の流れをチェックし、不具合があれば調整する。