はじめに
本ドキュメントは、MIRS1601のモータ制御基板の詳細設計について記したドキュメントである。
変更点
制御モータ数を2個増やし、Arduino Dueにて一枚の基盤にて制御を行う。FETトランジスタをモータドライバに変更することで素子数を減らし基盤の小型化を行う。
機能概要
この基盤はモータードライバ L298を使用し、Arduino Dueから送られる8つのデジタル信号と4つのPWM信号により4個のモータを制御する機能を有する。
仕様詳細
回路図
Arduinoから6.0[V],3.3[V],GNDを各1pinずつ、PWM信号が4pin、デジタル信号が8pin、計15pinをバス回路基板を経由して接続する。
Arduinoから送られる3.3[V]のPWM信号をフォトカプラにより6.0[V]へ昇圧し、そのPWM信号とArduinoからの2本のデジタル信号によってモータの正転、逆転を制御する。この基板の回路図を以下に示す。
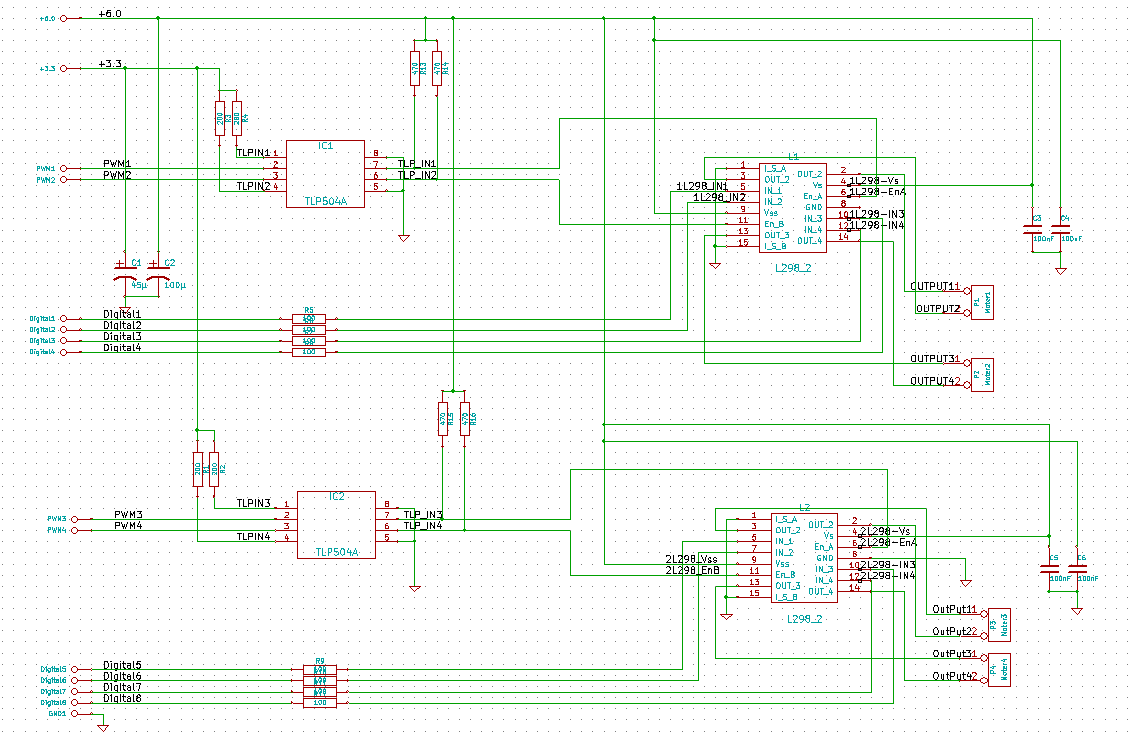
fig.1 回路図
作成方法
基板加工機用mitファイル
基板を加工する際に使用するmitファイルを以下に示す。
モータ制御基板 加工データ
パターン図
パターン図を以下に示す。
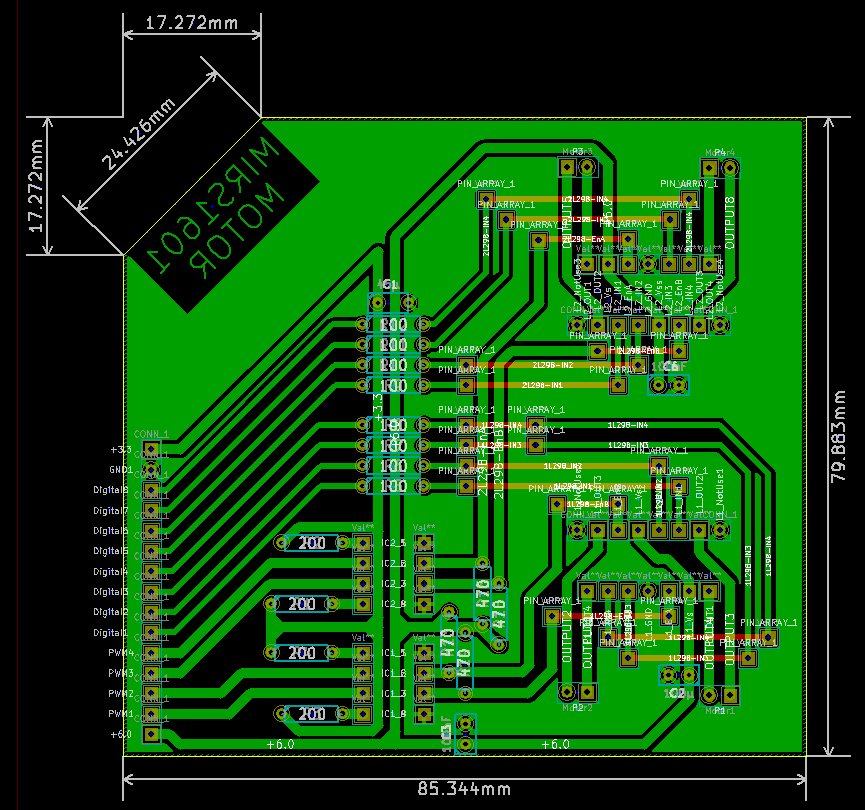
fig.2 パターン図
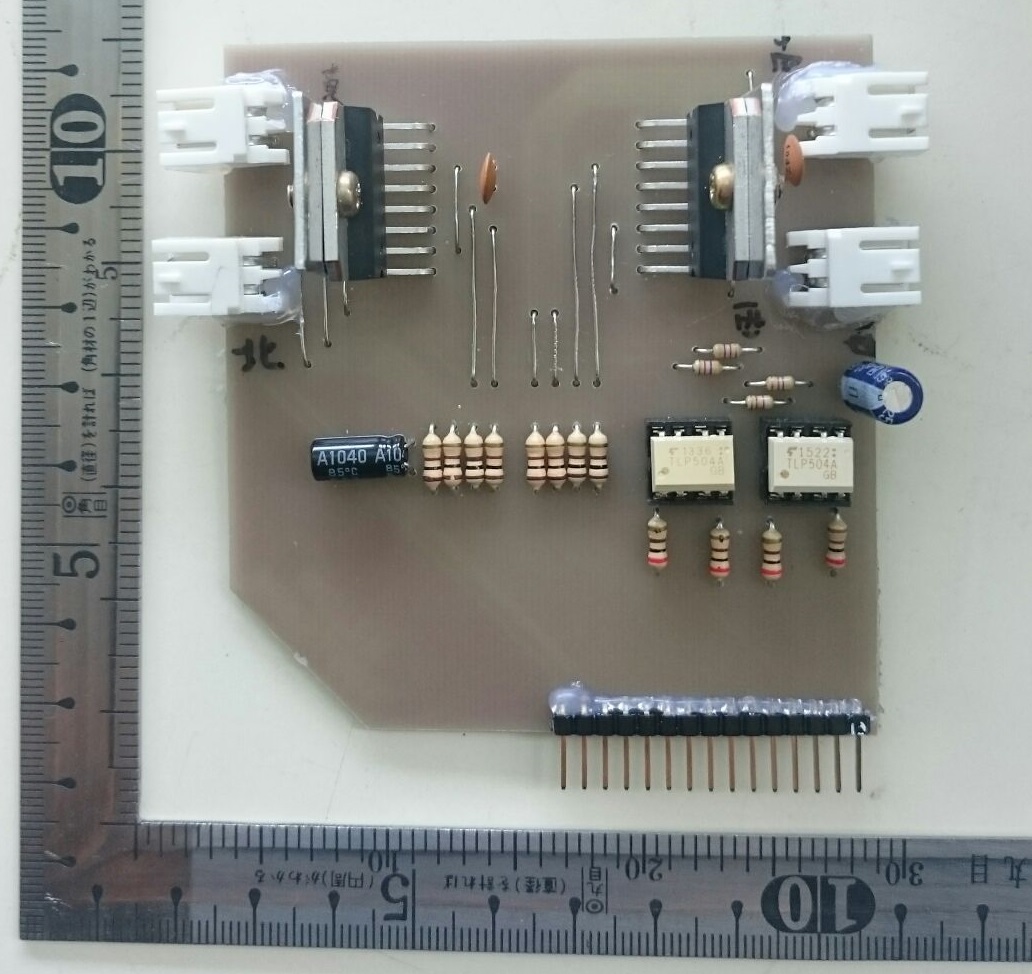
実装図
実装図いかに実装図を示す。
必要部品
必要部品を以下の表に示す。表記は回路図と同じ表記である。
| 素子名 | 表記 | 型名 | 個数 |
|---|---|---|---|
| 抵抗 | R5〜R12 | 100Ω | 8 |
| 抵抗 | R1〜R4 | 200Ω | 4 |
| 抵抗 | R13〜R16 | 470Ω | 4 |
| コンデンサ | C3〜C6 | 100nF | 2 |
| コンデンサ | C1 | 47μF | 1 |
| コンデンサ | C2 | 100μF | 1 |
| フォトカプラ | IC1,IC2 | TLP504A | 2 |
| モータドライバ | L1,L2 | L298 | 2 |