はじめに
本ドキュメントは競技会に向けた、競技攻略のためのシステム提案を行うものである。
チームコンセプト
- テーマ

小型化、高速化を徹底し対戦相手よりも早く、速く怪盗機を確保する。
戦略概要
今回の競技会を攻略するための構想を以下に示す。
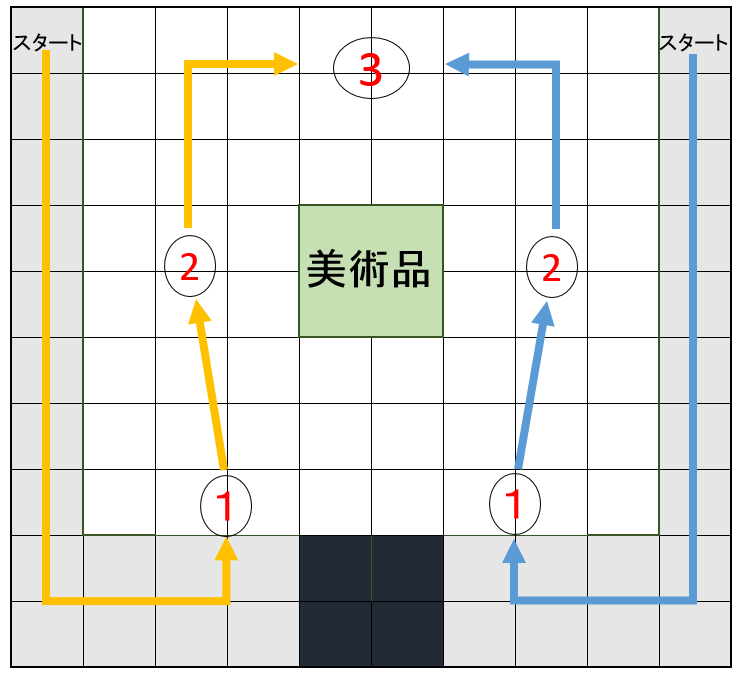
Fig.1:競技フィールド概形
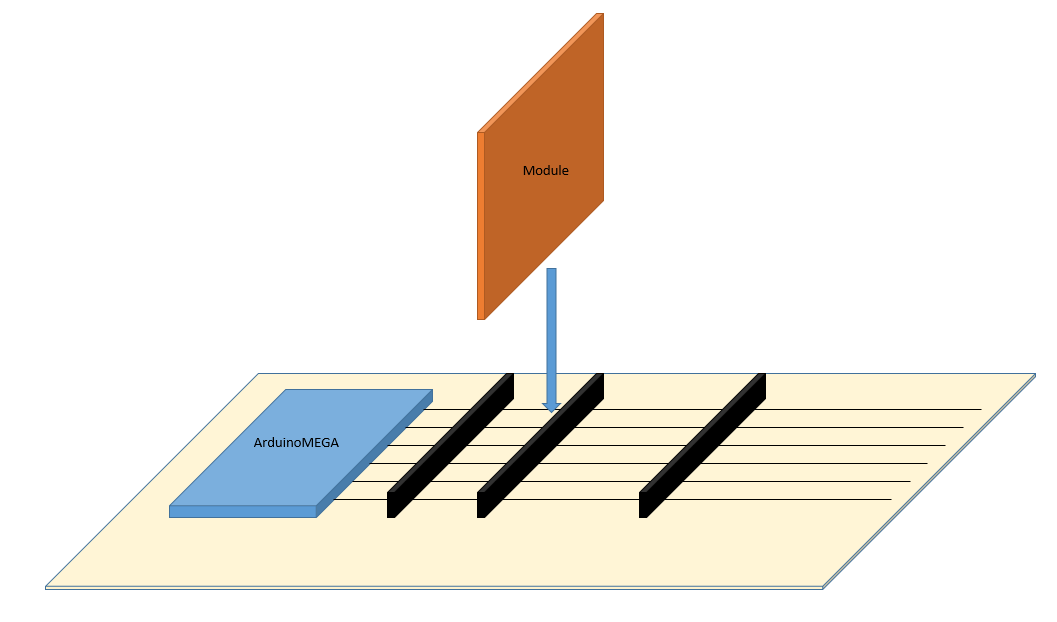
Fig.3:バス配線イメージ図
MIRS1601ドキュメント管理台帳
- ①現場急行 L字型のコーナーを素早く回り、数字認識を行う。
- 直進、回転、またはオムニホイールによる平行移動を駆使して数字ボードまで進む。
- 超音波センサを用いて数字ボートに対して正対補正を行う。
- カメラを用いて数字認識を行う。
- 認識した数字をサーバーに送信し、展示室に入る。
- ②巡回捜索 展示室内を走行して、怪盗機を見つける。
- カメラを用いて画像処理を行い、怪盗機を探し出す。
- 8方向に付ける赤外線センサを用いて、怪盗機を追い詰める。
- カメラに怪盗機が写らない場合は、展示室内を壁伝いに移動。その後移動した位置で再度捜索する。
- 怪盗機を見つけた場合、確保プログラムに移行する。
- ③確保 怪盗機に突撃し確保する。
- 怪盗を認識した後に高速で突撃、確保する。
- 赤外センサーを8方向につけ、全方位に対して怪盗機を捜索する
- 認識した方向に対して、その場回転をせずに直進することでタイムロスを減らす。
- 突撃するときに、カメラで画像処理を並行して行い、怪盗機の赤色のターゲットに追従する。
- 突撃中に怪盗機を見失った場合、巡回捜索プログラムに移行する。
Fig.1:競技フィールド概形
システム概要
システム概要を以下に示す。- 縦横無尽の移動方式
オムニホイールを4輪取り付けることにより、その場回転や方向転換に要する時間をなくす。 例えば、怪盗機がmirs1601の後方にいたとしても、旋回せずに追跡できるようにする。 立方体に近い機体を作成し、その4面にオムニホイールを一つずつ付ける。
- 斬新奇抜な機体小型化
機体を小型化をすることで、より機動性を高める。 機体が小さくなるとカーブ、停止時の慣性が小さくなり小回りが利くようになる。 機体外形を立方体にすることで、機体内部に無駄なく基盤や配線を収納する。 外形は標準機の直径350[mm]の円柱型から、1辺が200[mm]の立方体型にする。 (7.機体概形 fig.3参照)
- 八面六臂の八方位センサ
赤外線センサを機体の8方位に搭載することで全方位を素早く捜索する。 怪盗機がMIRS1601のどの方向にいるかを短時間で読み取ることで、より高度な追跡を可能とする。 怪盗機を捜索するときは、赤外線センサを重点的に用いる。
- 開発の効率化
ArduinoMEGAを搭載することで、ソフト面での開発をより効率化する。 機体に搭載するセンサをArduinoMEGAを用いることで簡単に処理することができるようになる。 以下に全体の通信の概略図を示す。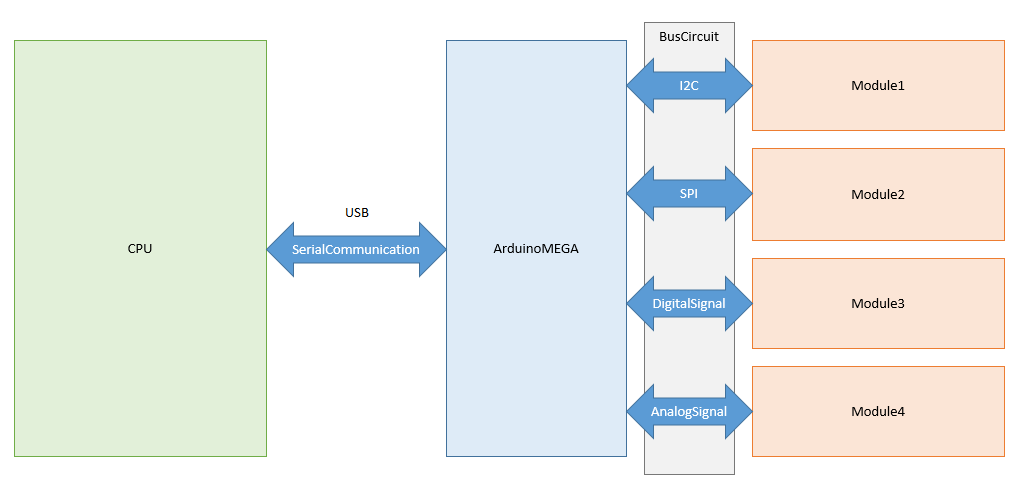
Fig.2全体の通信の概略図
改良、追加する要素
5.1 メカ
メカの変更点詳細を、下のtable1に示す
table1:メカの変更点
| 変更点 | 目的・理由 | 考えられる問題点 |
|---|---|---|
| 外形を直径30センチの円形から一辺が20センチの正方形へ | 壁や美術品への衝突の可能性を減らし、コース破壊による減点を阻止する。 | 当たり判定が少なくなり、怪盗機確保に支障をきたす恐れがある。 |
| 4輪化 | 移動性を向上し、怪盗機の捕獲タイムを短くするため。 | 消費電力の増加。 |
| エンコーダとの接続をギアに変更 | ロータリーエンコーダによる距離測定において測定精度を向上し、安定した走行を行うため。 | モーターの回転方向とエンコーダーの回転方向が標準機に比べ逆になってしまう。 |
| オムニホイールの使用 | 標準機のタイヤでは実現できない、斜め移動を可能とすることで旋回する手間を減らし、いち早く怪盗機を発見するため。 | 技術的難易度の急上昇。 |
| カバーの追加 | 配線だらけの内部を包み隠すことで、見た目を優美にする。 | 整備性の低下、CPU等の廃熱に影響する恐れ。 |
5.2 エレキ
エレキの変更点詳細を、下のtable2に示す
table2:エレキの変更点
| 変更点 | 目的・理由 | 考えられる問題点 |
|---|---|---|
| ArduinoMEGAの採用 | ArduinoMEGAを使用することで、インターネット上にあるライブラリを活用し、センサーより受け取った信号をより簡単に処理するため。 | 高価なため、手元にあるものが破損・紛失した場合交換しにくい。 |
| 超音波センサの変更・増設 | 標準機の超音波センサより高機能な超音波センサを使用し、精度を向上させるため。
また、4個に増設して4方向の障害物を常に検知し、壁に当たらない走行を実現するため。 |
|
| カメラの増設 | 3方向にカメラを設置し、視野を広くして怪盗機を捕捉するため。 | |
| モーター制御ボードの製作 | オムニホイールを4つ用いて、四輪駆動するため、モータ制御回路が4セット必要となる。
これをフルブリッジ回路が2つ内蔵されているモータードライバIC「L298N」を使用し、小型化するため。 |
発熱量が多いため、冷却する必要がある。 |
| 赤外線センサの導入 | 怪盗に赤外線発信機が搭載されるので、それを検知するため。 | アナログ信号を処理できるICまたは回路が必要。 |
| ドータボードをバス配線に変更 | CPUと各種センサの間にArduinoMEGAを接続し、ArduinoMEGAと各種センサとの通信をバス配線にする。
このとき、モジュール基板で使わないピンは電気的に絶縁させ、使用ピンは他のモジュール基板と重複しないようにする。 これによって、機能の拡張性や保守性を向上させるため。イメージ図をFig.2に示す。 |
基板作成や半田付けの作業が増える。また、使用するピンを重複しないように管理する必要がある。 |
| 電源端子の変更 | 元の電源端子であるB型コネクタをT型コネクタに変更し、抜けにくくするため。 | 特になし。 |
| テープLED・RGBLEDの実装 | 装飾を付けることで見た目を煌びやかにするため。また、観客を魅せるため。 | 電力が不足する恐れがある。 |
| タッチセンサ取り付け廃止 | 超音波センサで壁を検知するため使わなくなった。また、オムニホイールを4面に取り付けるため、タッチセンサを取り付けるスペースがないため。 | 特になし。 |
Fig.3:バス配線イメージ図
5.3 ソフト
ソフトの変更点詳細を、下のtable3に示す
table3:ソフトの変更点
| 変更点 | 目的・理由 | 考えられる問題点 |
|---|---|---|
| オムニホイールでの走行プログラムの作成。 | オムニホイールで走行できるようにするため。 | 開発項目が多いため、開発に時間がかかる。 |
| 巡回動作プログラムの作成。 | 怪盗を捜索するため。 | |
| OpenCVによる画像認識プログラムの作成。 | カメラを用いて画像を取り込むため。 | |
| 画像処理プログラムの作成。 | 怪盗(赤い風船)を識別するため。 | |
| 突撃プログラムの作成 | 怪盗を確保するため。 | |
| 超音波センサモジュール内のプログラムの変更。 | 超音波センサ変更に伴うプログラム内の干渉を調節し正体補正の精度を向上させるため。 | |
| 急行プログラムの作成 | 競技目標の現場急行を実現するため。 | |
| LED点灯プログラムの作成。 | 観客を魅せるため。 |
購入予定物品
購入予定物品を以下のtable4に示す
table4:購入予定物品
| 物品 | 必要個数 | 購入数 | 参考価格(円/個) | 小計 | 購入先 | 備考 |
|---|---|---|---|---|---|---|
| ArduinoMEGA | 1 | 1 | 3,000 | 3,000 | switchSience | |
| モータドライバ「L298N」 | 2 | 4 | 300 | 1,200 | 秋月電子通商 | |
| 赤外線センサ「GP1UXC41QS」 | 8 | 10 | 50 | 500 | ||
| ADコンバータ「MCP3208」 | 1 | 2 | 320 | 640 | 赤外線センサのアナログ値を変換し、SPI通信でArduinoMEGAへ送信するため購入。 | |
| テープLED | 未定 | (1) | 500 | 500 | 余剰予算で購入数確定。 | |
| RGBLED | 未定 | (1) | 550 | 550 | 同上。10個入りの価格。 | |
| 1x40Pピン | 未定 | (1) | 50 | 50 | モジュール数によって購入数確定。 | |
| 1x20Pピンソケット | 未定 | (1) | 60 | 60 | ||
| T型コネクター(雄) | 2 | 4 | 53 | 212 | せんごくネット通販 | |
| T型コネクター(雌) | 6 | 8 | 53 | 424 | クラフトワイヤー丸2mm(1.5m巻) | 2 | 2 | 500 | 1000 | モノタロウ | オムニホイール | ウレタンパイプ250mm | 1 | 1 | 572 | 572 | ナットM2.6(13個入り) | 15 | 323 | 4,845 | アクリル板5mm(500mm×500mm) | 1 | 1 | 5,090 | 5,090 | 合計金額(円) | 14,121 |
機体概形
下図に、機体イメージ図を示す。
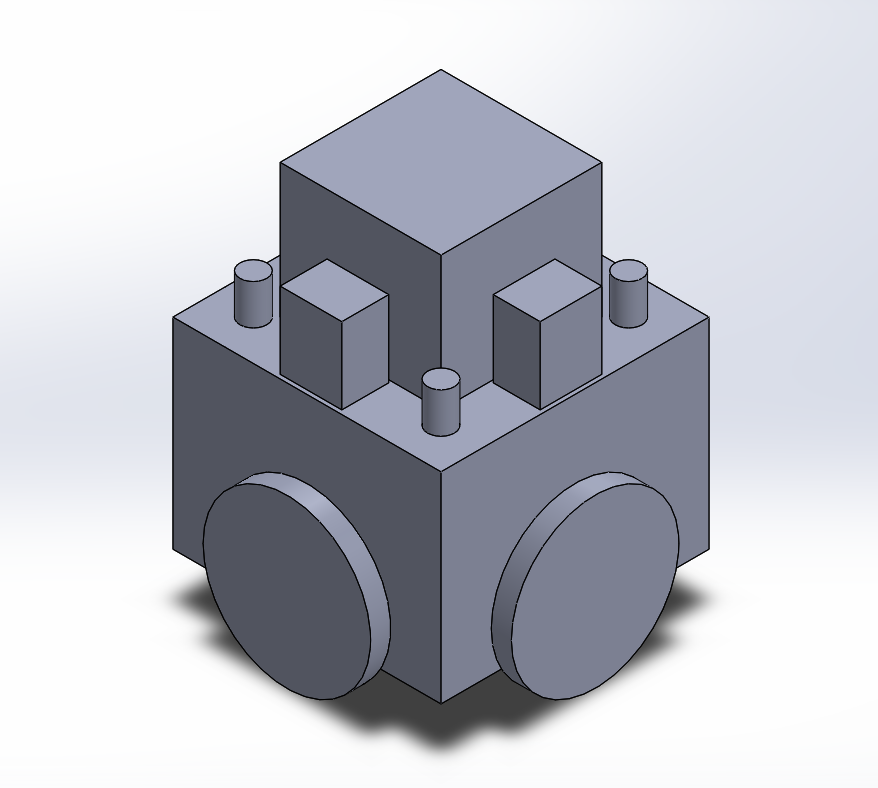
Fig.4:外観図
Fig.4:外観図
MIRS1601ドキュメント管理台帳