はじめに
本ドキュメントは5月1日に行われたMIRS1402の解体に関する報告書である。
参加メンバー
参加メンバーと担当教員を表1に示す。
| 実施日 | 参加者 |
|---|---|
| 2015.5.1 | MIRS1502 (加藤正純,金指真之介,奥一貴,富田健斗,近藤 有 大川賢一郎,飯田峻也,平田和奏,北原一総) |
解体について
解体は取り外しがしやすい上部から始め、以下の順序で解体を行った。また、下記Fig.1に図から見たときの手引きを示す。
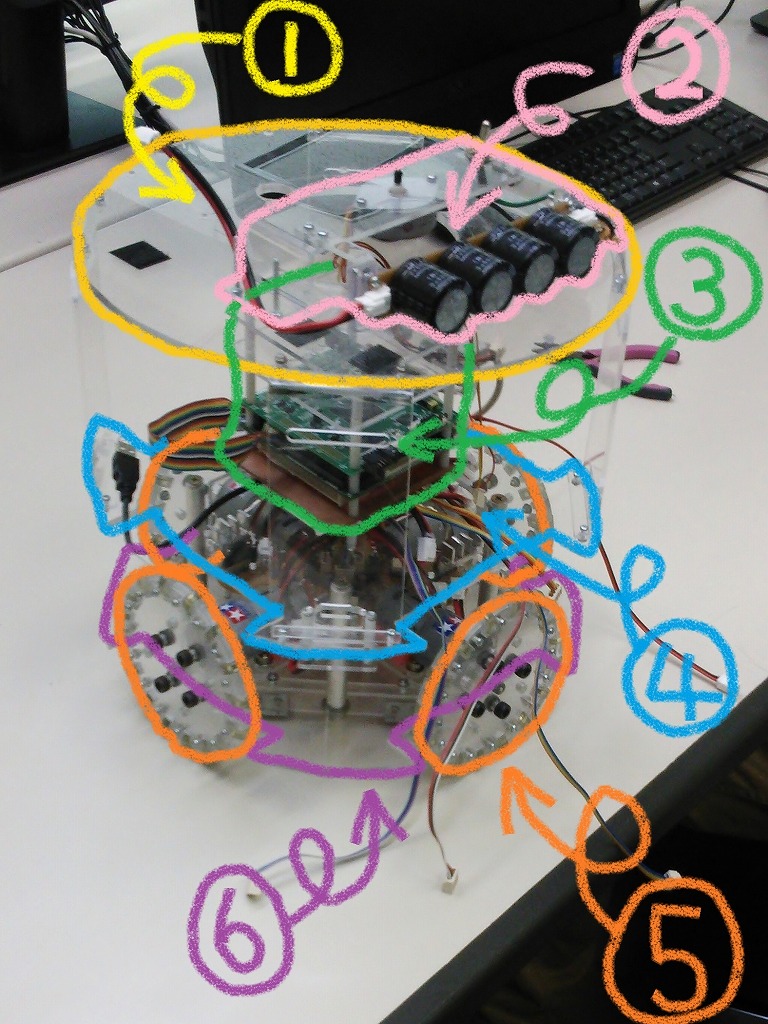 Fig.1 全体図 |
3.1 解体について
3.1.1目的
前年度のMIRS1402が作った機体の内容(回路基板、部品組み立てetc)を把握し、またこの解体を通して得た知識(素子の使い方、回路etc)を今回のMIRS1502で応用し、よりよい機体を作成する。またこの解体と並行して行うことは、MIRS1402の書いたドキュメントを見てMIRS1402がどのような作成過程を経て機体を完成させたのか学ぶ。
3.1.2 解体前
まず最初に解体前の全体図をFig.2〜Fig.5に示す。
解体前の機体は主にアクリル板で構成されており、重心は他の機体よりもやや高めにあり縦長の作りである。
またタイヤがオムニホイールであるという所も1つの特徴である。
オムニホイールを使用するメリットとして、詳しいことは3.5 オムニホイールにて説明するがタイヤに比べて前後左右の移動がスムーズにでき、MIRS1402のチームコンセプトである「全方位移動」を可能としている。
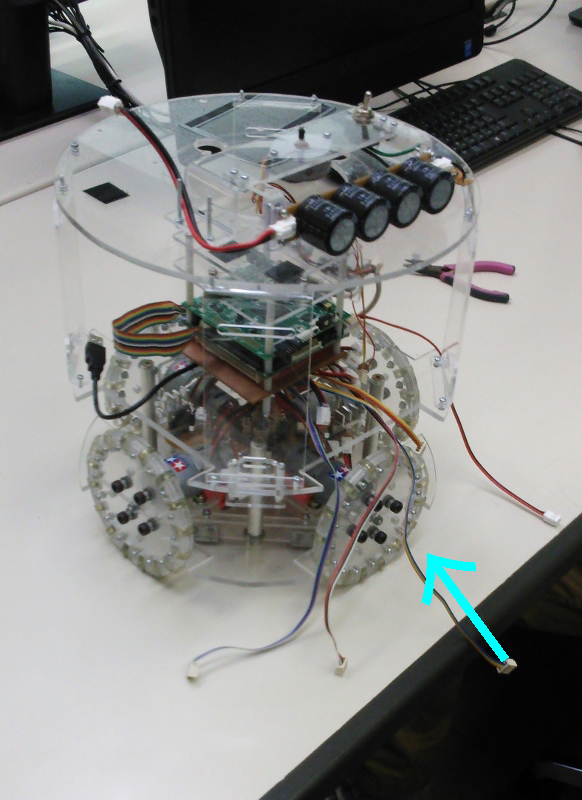
Fig.2 全体図
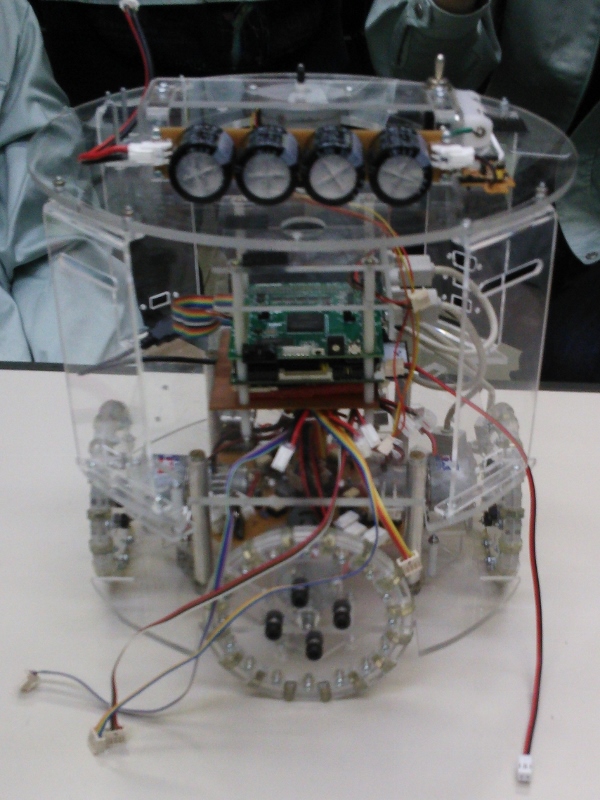 Fig.3 正面図 |
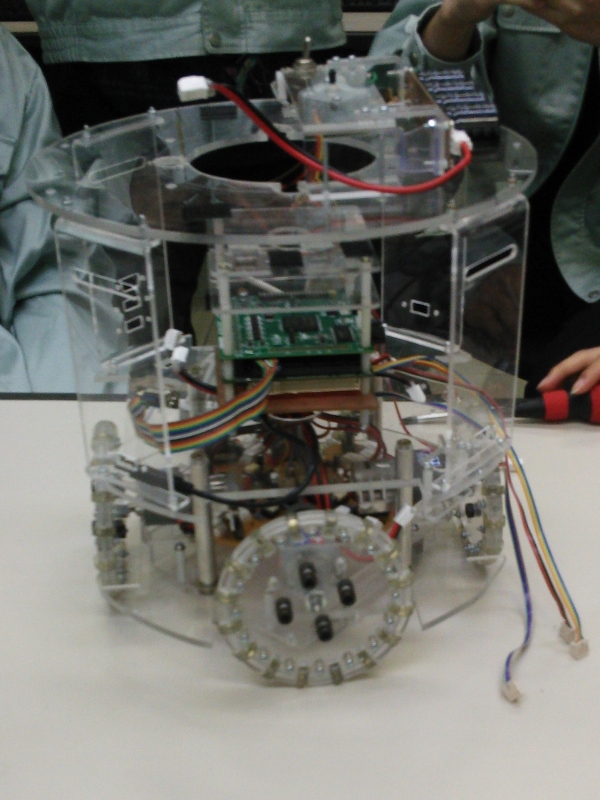 Fig.4 側面図 |
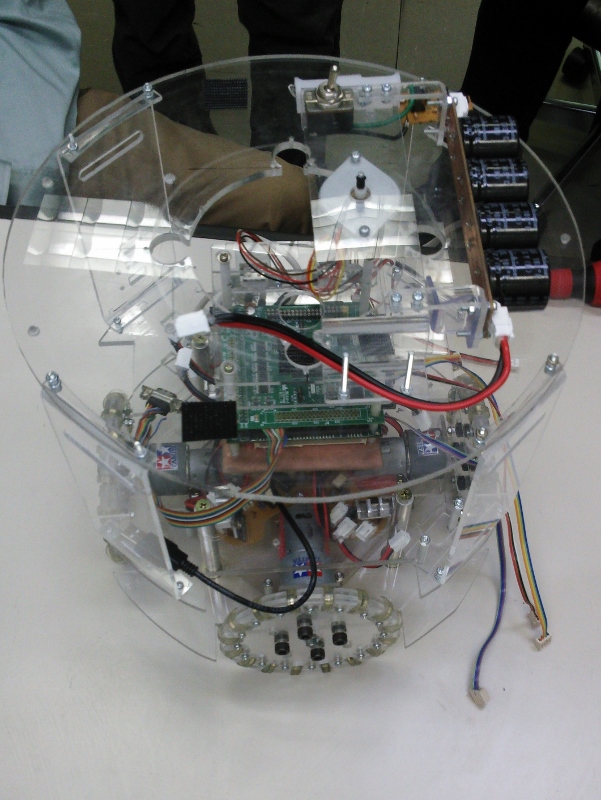 Fig.5 上面図 |
3.2 上板シャーシの取り外し
3.2.1 上板シャーシの取り外し
始めに上板シャーシを取り外した。上板シャーシはねじで4本の支柱と垂直に取り付けられていた。
これの取り付け方として、両端にそれぞれ2本ずつのねじで固定されていた。
これはパイルバンカーを固定するためのものであり、怪盗機に取り付けられた(高い位置にある)風船を割るためにある。
Fig.6に上板シャーシの全体図を示す。
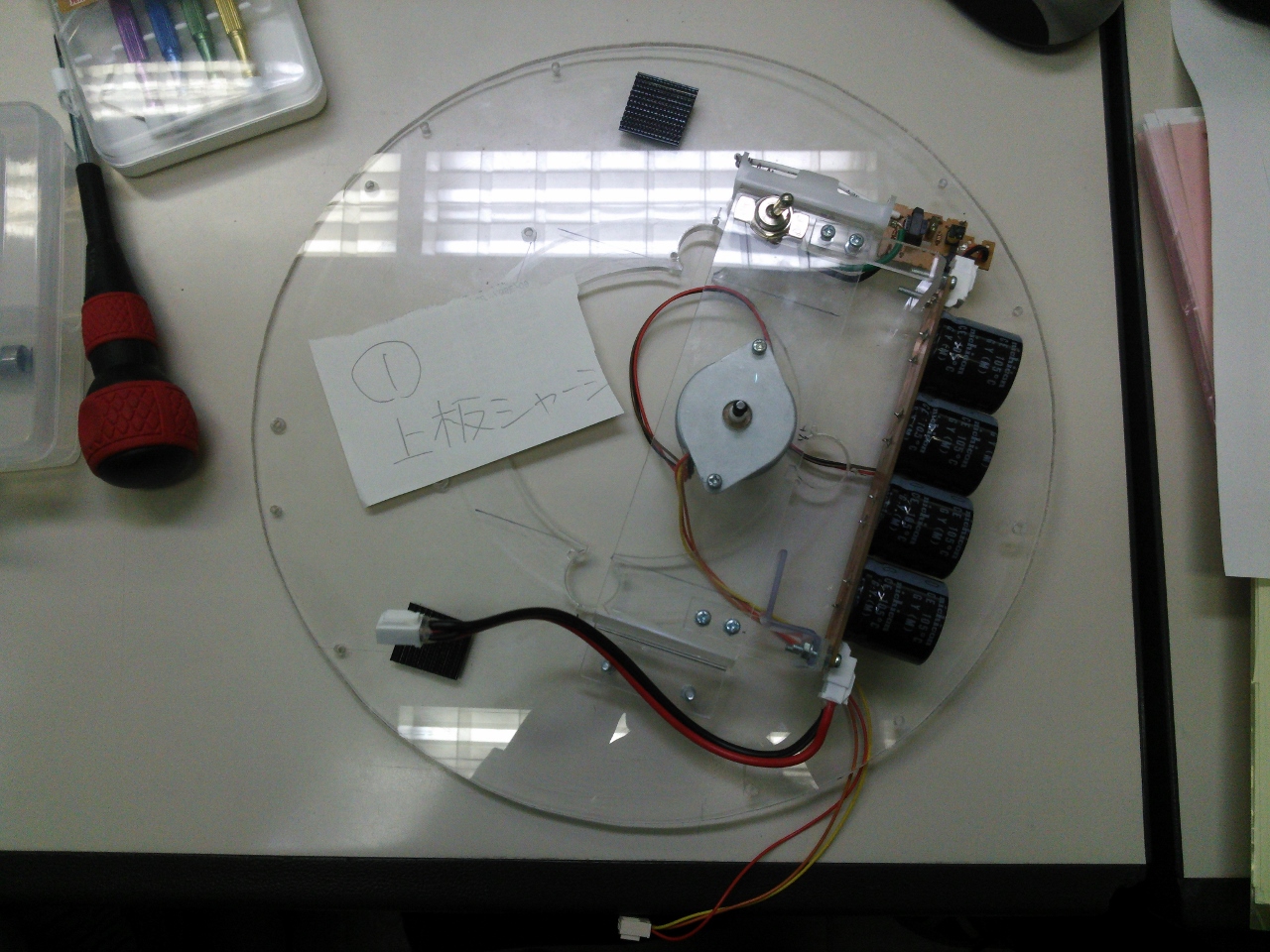
Fig.6 上板シャーシ全体図
3.2.2 支柱の取り外し
上板シャーシ上部を固定していたアクリル製の支柱を取り外した。支柱は4本で構成されていて、ねじで各2箇所、合計で16箇所固定されていた。
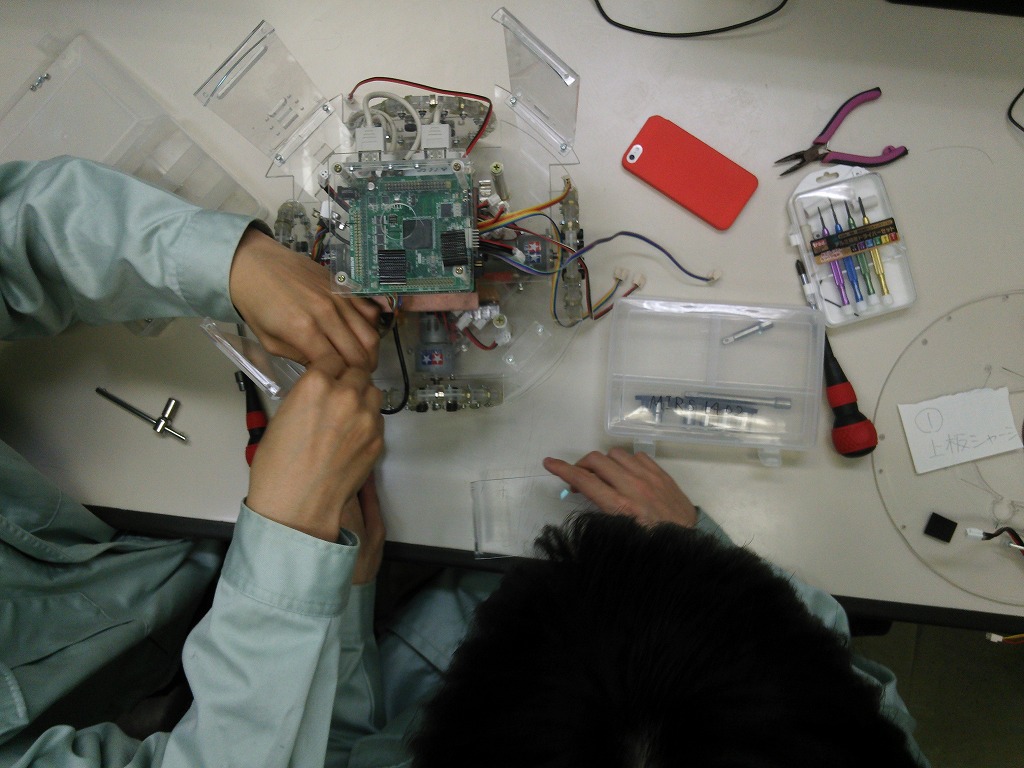 Fig.7 支柱解体風景 |
 Fig.8 支柱 |
3.2.3 パイルバンカーの取り外し
上板シャーシ上部に取り付けられていたパイルバンカーを取り外した。パイルバンカーは4つの電解コンデンサとスイッチ・電源ケーブル(ステッピングモータ)で構成されていた。
また、本体は取り外され、プロジェクトブースに保管されていた。
パイルバンカーの構造としては、中央に鉄心が入っていて、その周りがコイルが囲い、ばねが鉄心を固定する構造となっていた。
鉄心の先端には針がついていて、パイルバンカーを射出すると風船が割れるようになっている。
コイルに電流を流すとパイルバンカーが射出され、電流を止めるとばねにより戻るこうぞうとなっている。
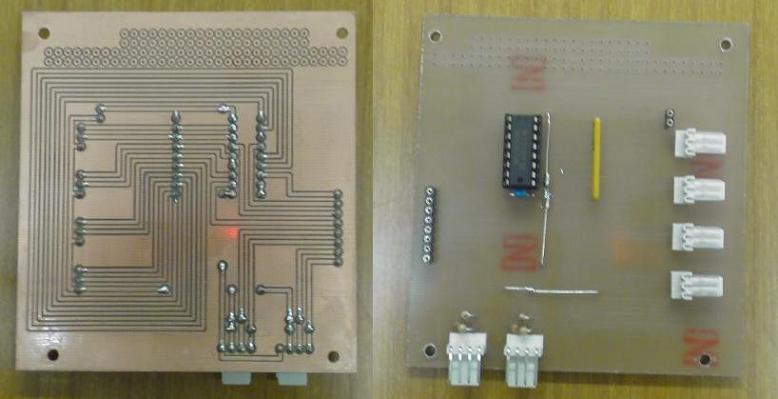
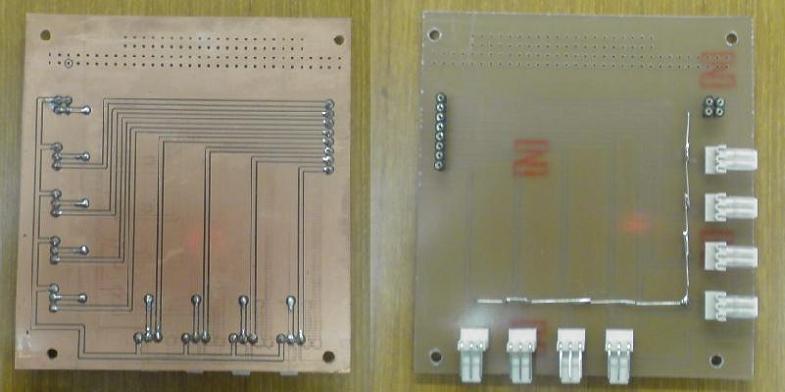
Fig.9はパイルバンカー部分の全体図である。
図の(1) の部分はパイルバンカーの駆動のための高電圧を作り出す昇圧基板である。回路はインスタントカメラのフラッシュ回路を使用している。取り出した図をFig.10に示す。
(2)の部分はコンデンサが4つ、並列に並んでいる。1つのコンデンサが耐圧450V、容量360uFなので、全体で耐圧450V、容量1440uFのキャパシタを構成している。
この2つの回路を組み合わせ、昇圧回路で発生させた高電圧を大容量のコンデンサに蓄えている。
それにより、パイルバンカーに高電圧をかけることができ、高速で射出することを実現している。
(3)はステッピングモータが上向きで固定されている。mirs1402の先輩方に訊ねたところ、この上にカメラをつけ、全方位を確認する装置を制作したが、実現ができなかったためモータだけが設置されている、とのこと。
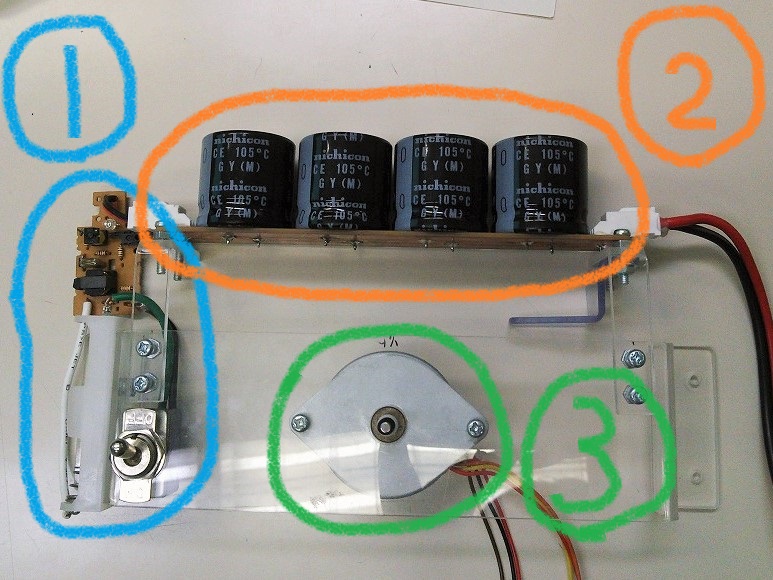 Fig.9 パイルバンカー全体図 |
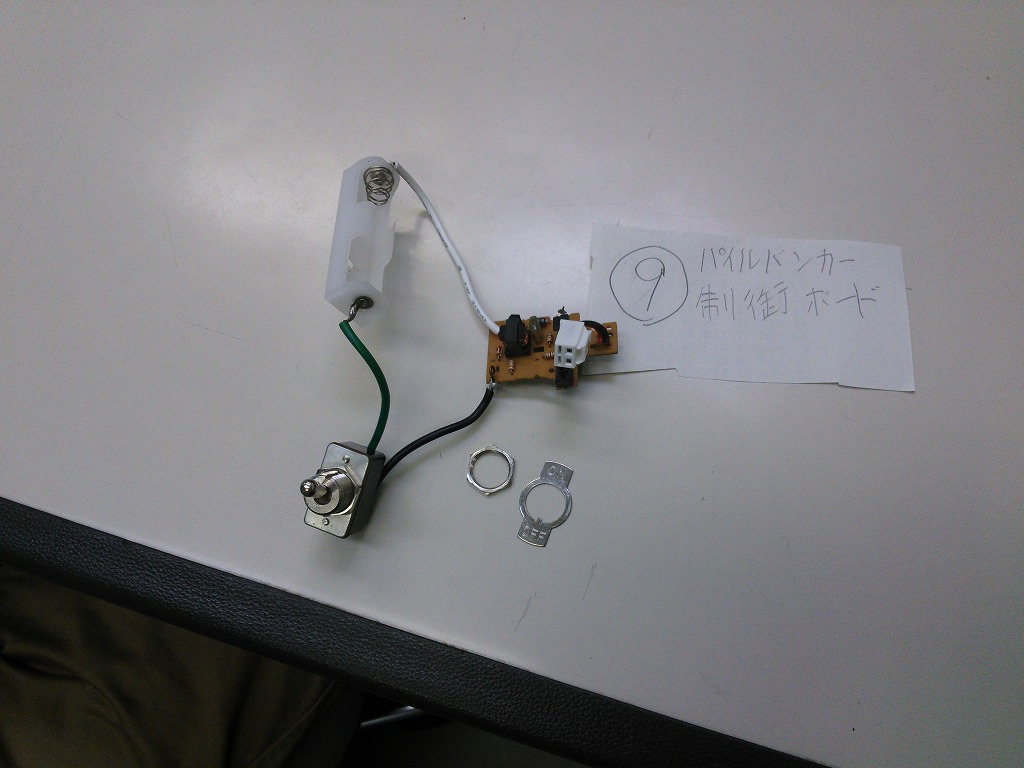 Fig.10 パイルバンカー用昇圧回路 |
3.3 FPGA・CPUボード取り外し
3.3.1 内部回路の取り外し
作業を効率よく行うために、始めに内部回路全体を取り外した。内部回路は上からアクリル板2枚・FPGAボード・CPUボード・方位センサ制御ボードの順に構成されていた(Fig.11参照)。
基板等はすべてPC104の規格と同じ固定穴を開けることにより、各々が重ねることが出来るこうにしている。これにより、省スペースで管理が楽な構造になっている。
また、USB端子を使用する際にFPGAボードに傷をつけないため、アクリル板を使用しFPGAボードを保護している(Fig.12参照)。
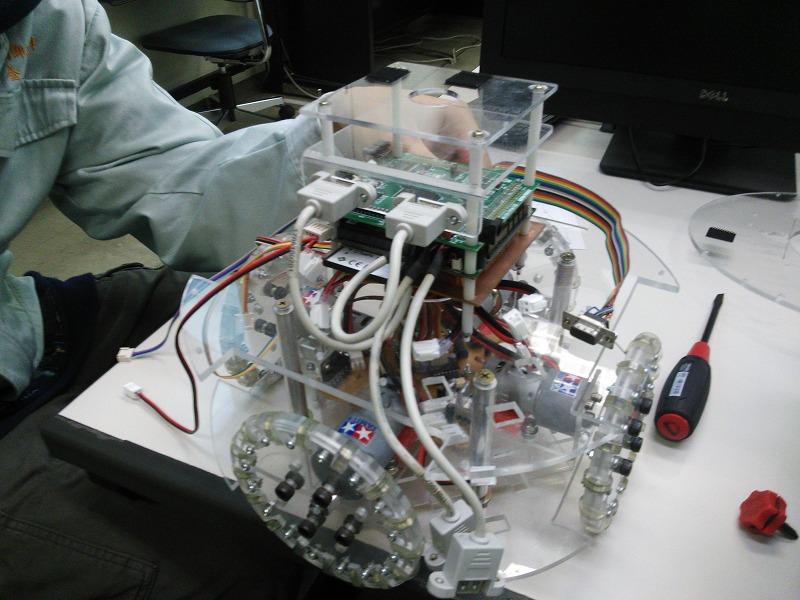 Fig.11 基板取付外観 |
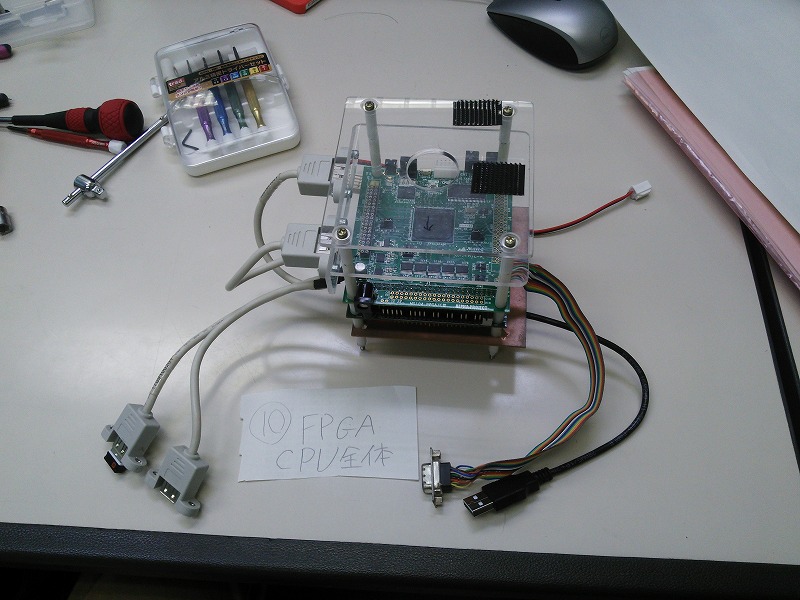 Fig.12 FPGA・CPUボード全体図 |
3.3.2 内部回路解体
内部回路のボードを下から順番に解体した。
それぞれのボードはスペーサーとねじで固定されていた(Fig.13からFig.16を参照)。
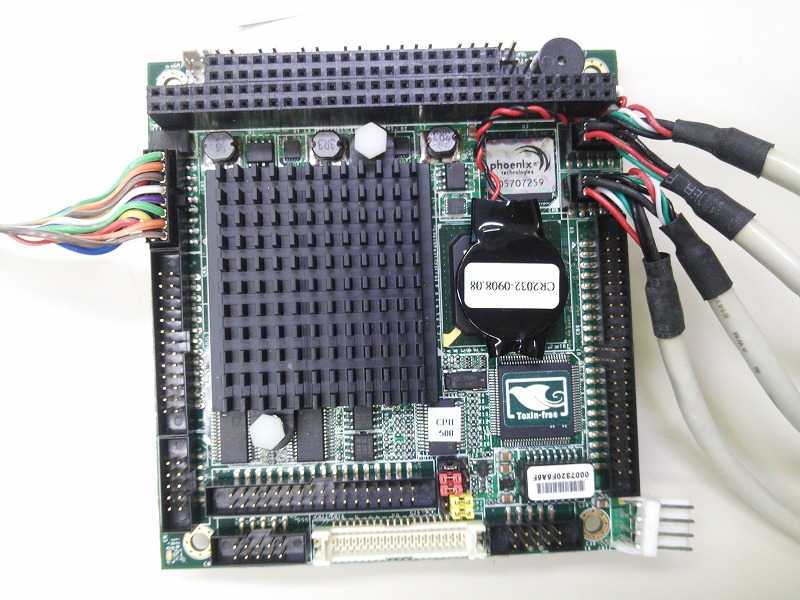 Fig.13 CPUボード |
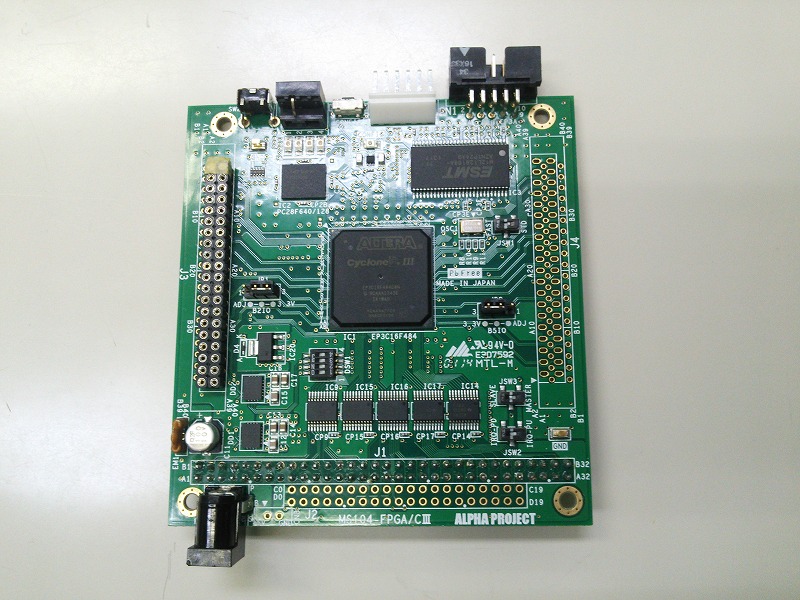 Fig.14 FPGAボード |
MIRS1402 方位センサ詳細設計書  Fig.15 方位センサ制御ボード |
 Fig.16 天板・USB端子固定板 |
3.4 中段シャーシの取り外し
3.4.1 中段シャーシの取り外し
中段シャーシはアルミの支柱4本で固定されていた。
取り外した中段シャーシ(Fig17,18)を見ると、オムニホイールとの接触を避けるための切り込みが入っていた。また、ケーブルを通すために中央に大きな穴が開いていた。
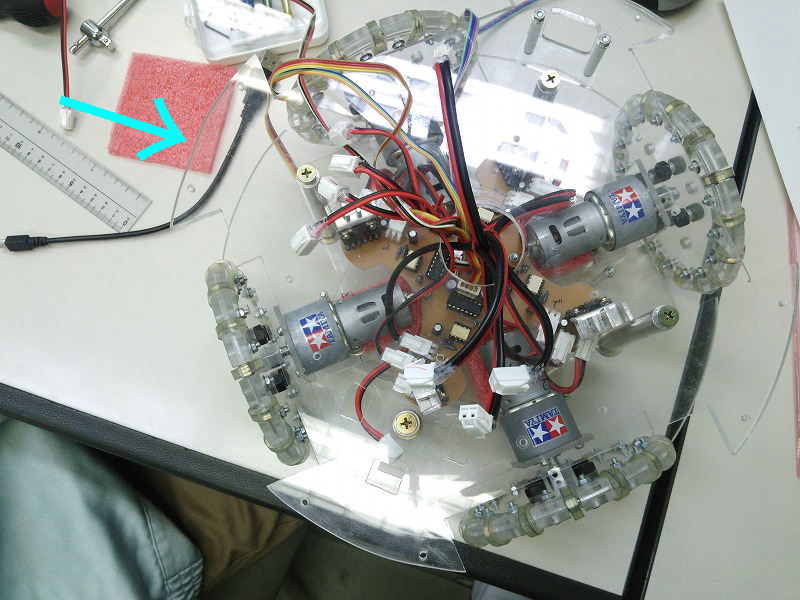 Fig.17 中段シャーシ外観図 |
 Fig.18 中段シャーシ |
3.4.2アルミ支柱の取り外し
ナットで下段シャーシに垂直に計4本取り付けられていた。
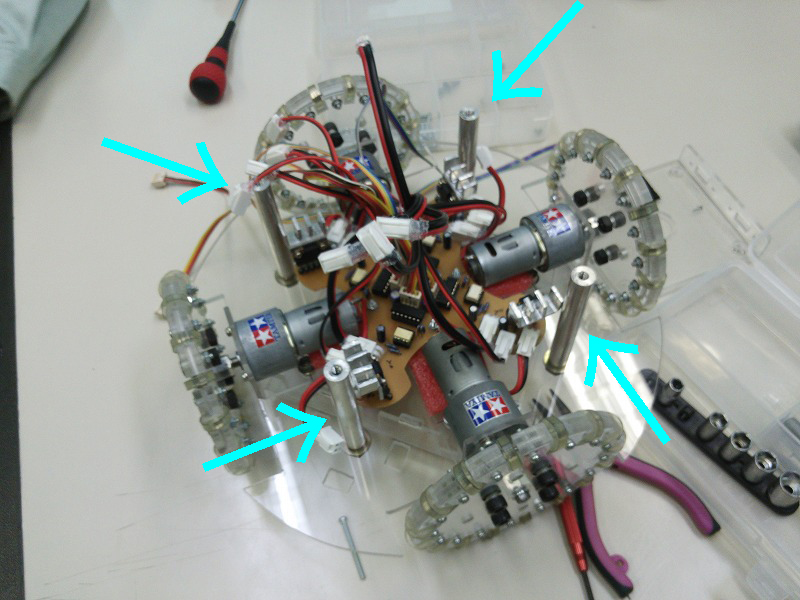 Fig.19 支柱取り外し前外観図 |
 Fig.20 支柱 |
3.5 オムニホイール
オムニホイールの取り外し
このオムニホイールはMIRS1402によって自作されたものであった。(Fig.21)
タイヤの代わりにオムニホイールを用いたのはチームコンセプト"全方位移動"を実現するため
[※1]である。
自作した理由としては、市販のオムニホイールよりも安価であることがあげられる。またスムーズに移動できることと、重心の安定のためにオムニホイールが4つ取り付けられていた。
また、オムニホイールの直径を大きくすることにより、高速に移動できるようになっている。
[※1]「MIRS1402 メカニクス詳細設計書」(2015/05/20)
http://www2.denshi.numazu-ct.ac.jp/mirsdoc2/mirs1402/mech/num0001a/MECH-0001.html
MIRS1402 オムニホイール詳細設計書

Fig.21 オムニホイール
3.6 モータ・下段シャーシ
3.6.1 バッテリーボックスの取り外し
下段シャーシに4本のねじで取り付けられていた。バッテリーボックスは蝶番とバッテリボックスと下段シャーシのはめあいで固定されていた。
この固定方法のため、バッテリーの取り外しが簡単になり整備しやすい作りになっていた。

Fig.22 バッテリーボックス
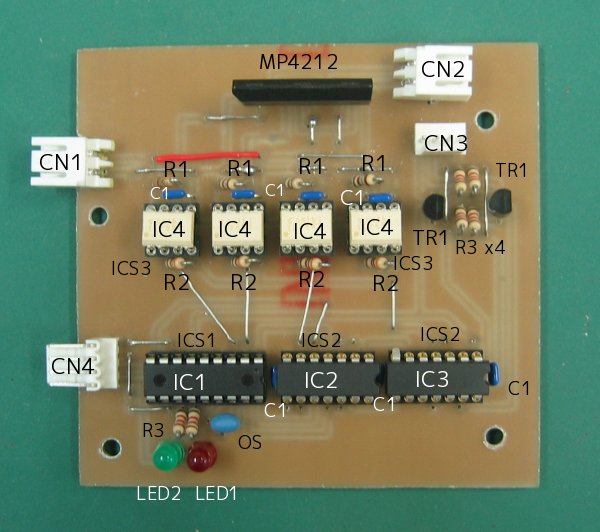
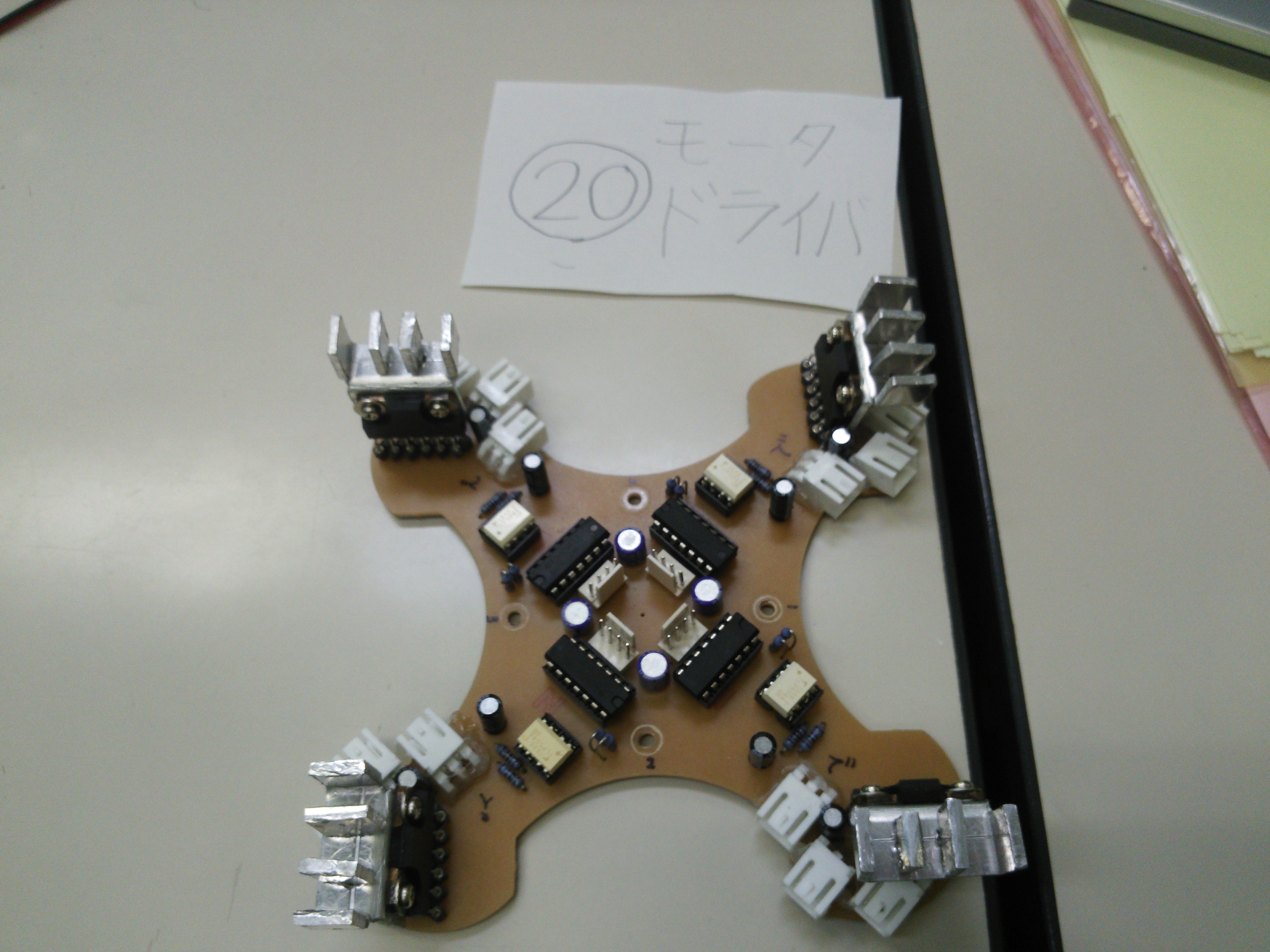
3.6.2 モータドライバの取り外し
4本のねじで下段シャーシに取り付けられていた。モータドライバは自作されており、モータドライバ4個分の機能が1つにまとめら
れていた(Fig.24参照)。
モータードライバーがこの形状になった理由は、それぞれのモーターを置く場所を確保するためである。
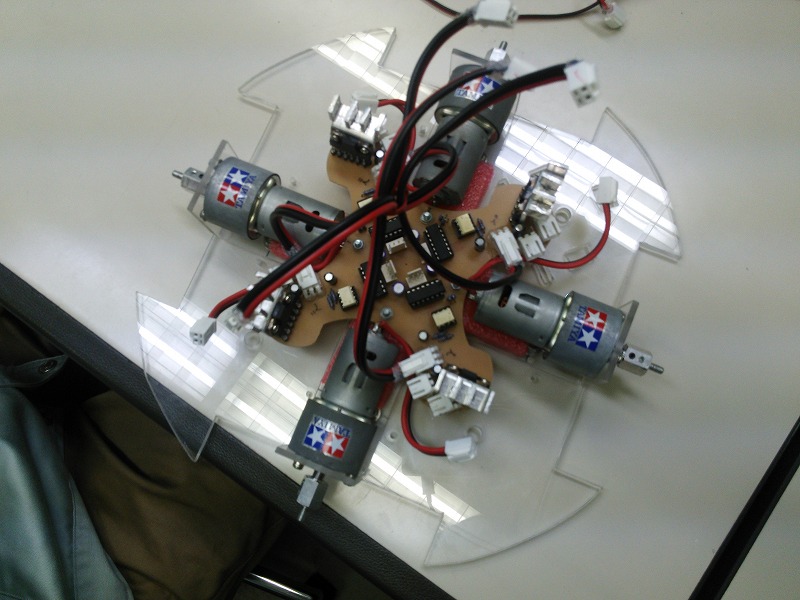 Fig.23 下段シャーシ外観図 |
 Fig.24 モータドライバ |
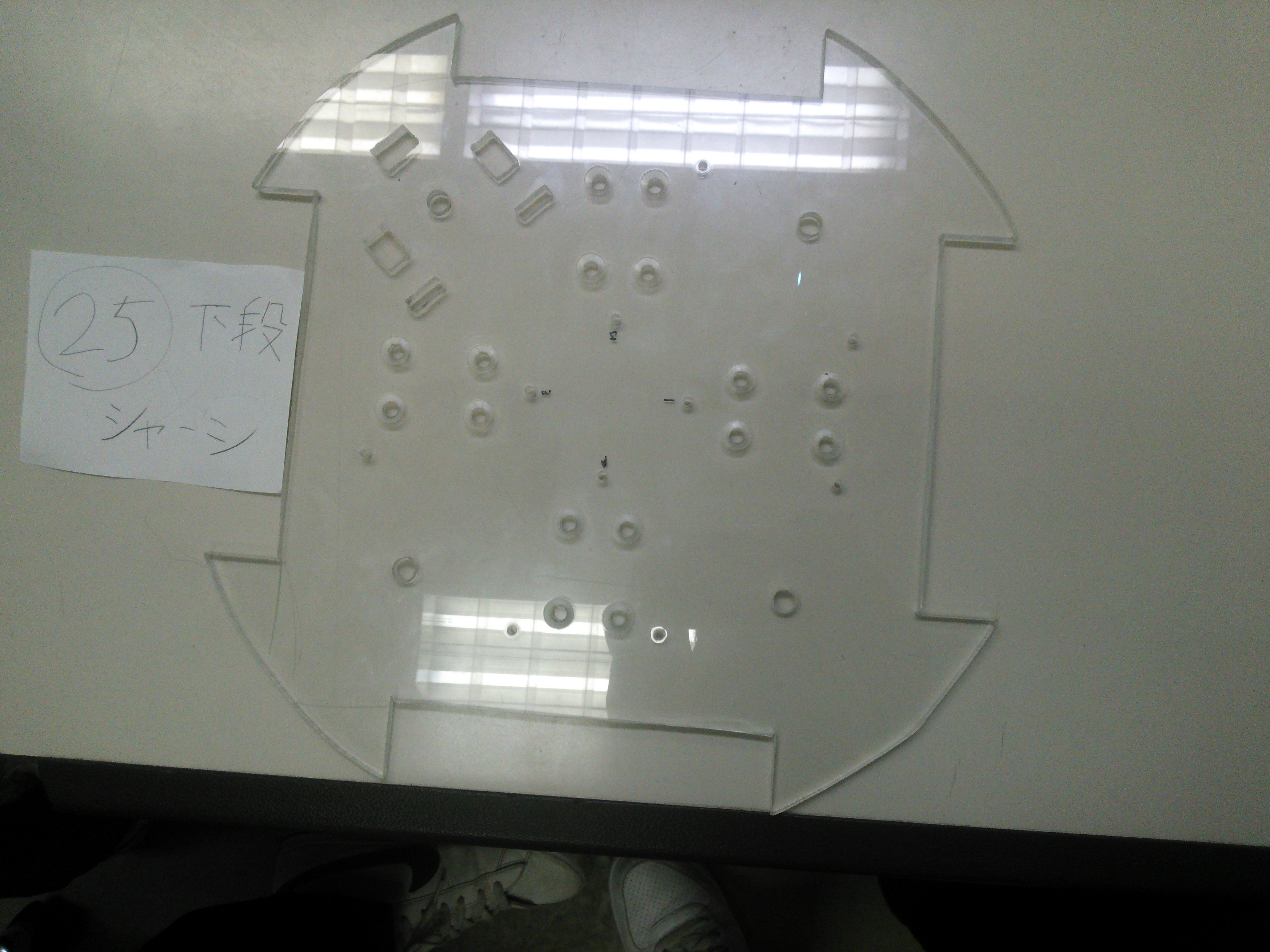
3.6.3 モータの取り外し
4つのモータはそれぞれがモータマウント、モータヘッドのセットで下段シャーシにそれぞれ4本のねじで取り付けられていた(Fig.25参照)。
先ず最初に、このセットを下段シャーシから取り外し、次にモータ(Fig.27参照)からモータヘッド(モーターが取れないための部品、Fig.28)を、そしてモータマウント(下段シャーシに支える部品Fig.29)を取り外した。
そしてすべて取り外した後の下段シャーシがFig.30である。
 Fig.25 下段シャーシ取付・外観図 |
 Fig.26 モータドライバ |
 Fig.27 モータ |
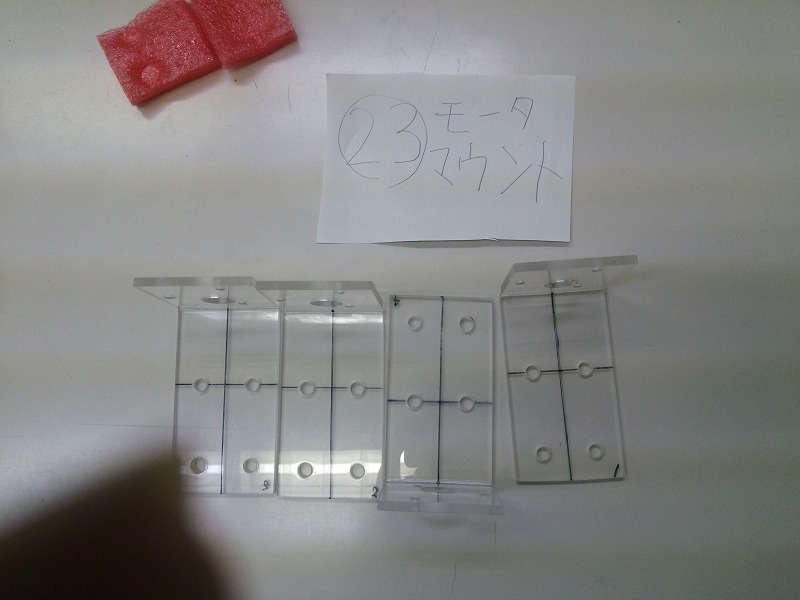 Fig.28 モータマウント |
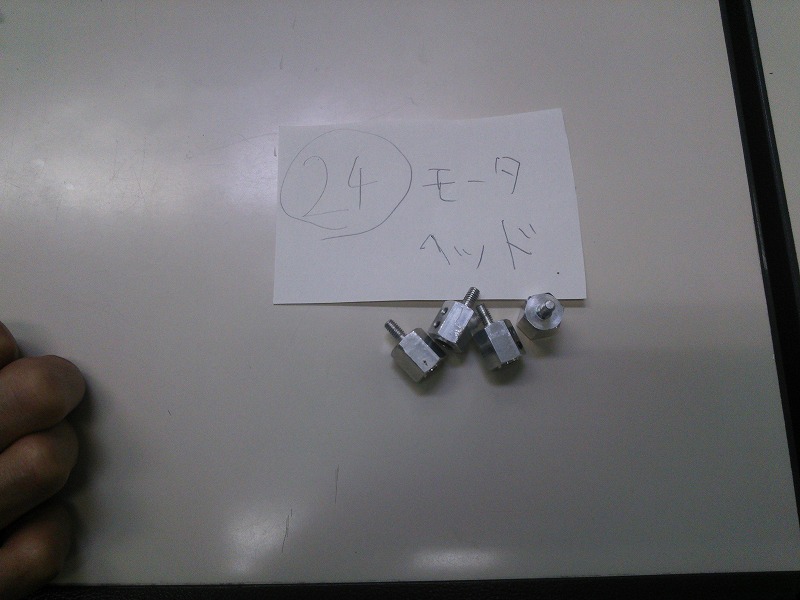 Fig.29 モータヘッド |
 Fig.30 下段シャーシ |
3.7 解体後
Fig.31〜Fig.34に、解体終了後のMIRS1402のパーツを示す。
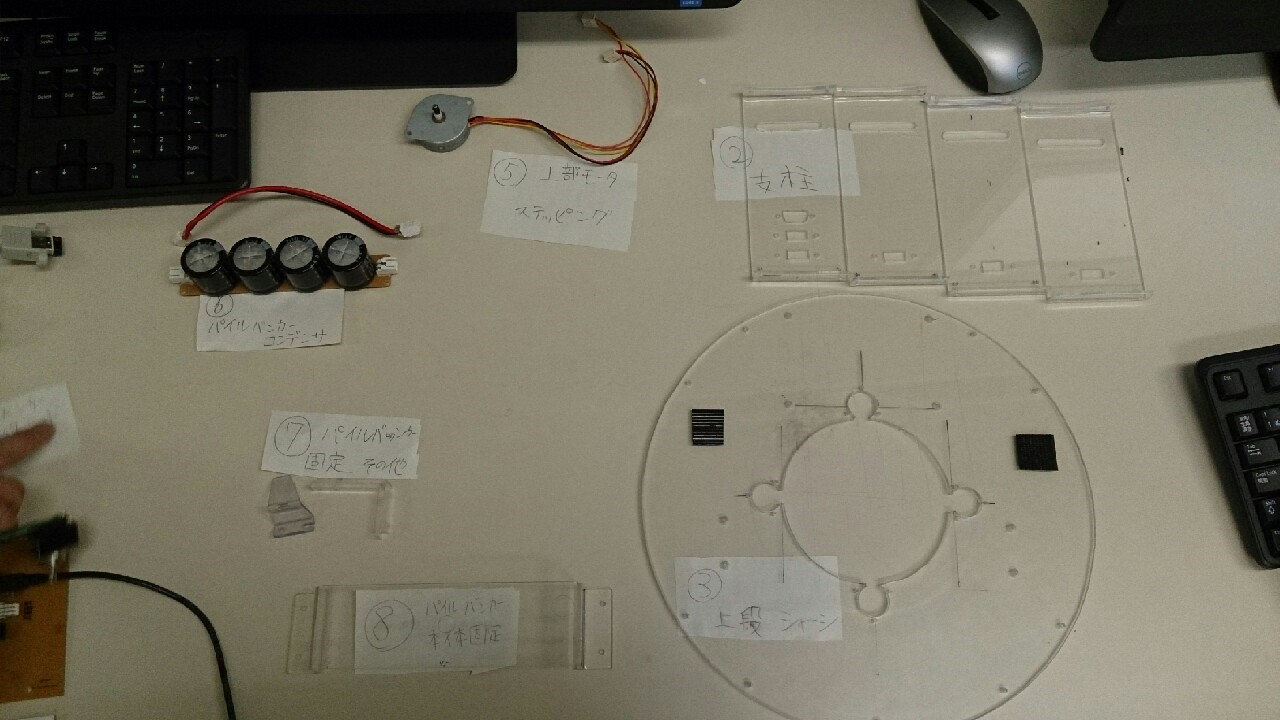 Fig.31 全体パーツ1 |
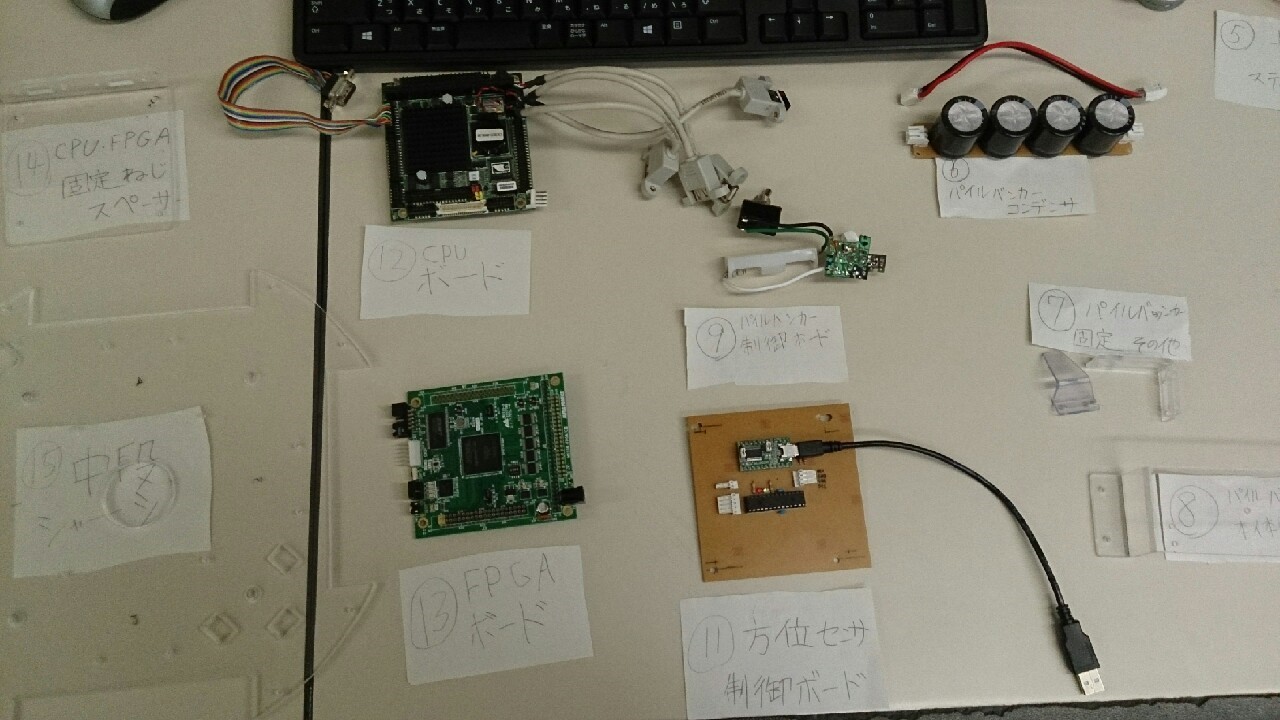 Fig.32 全体パーツ2 |
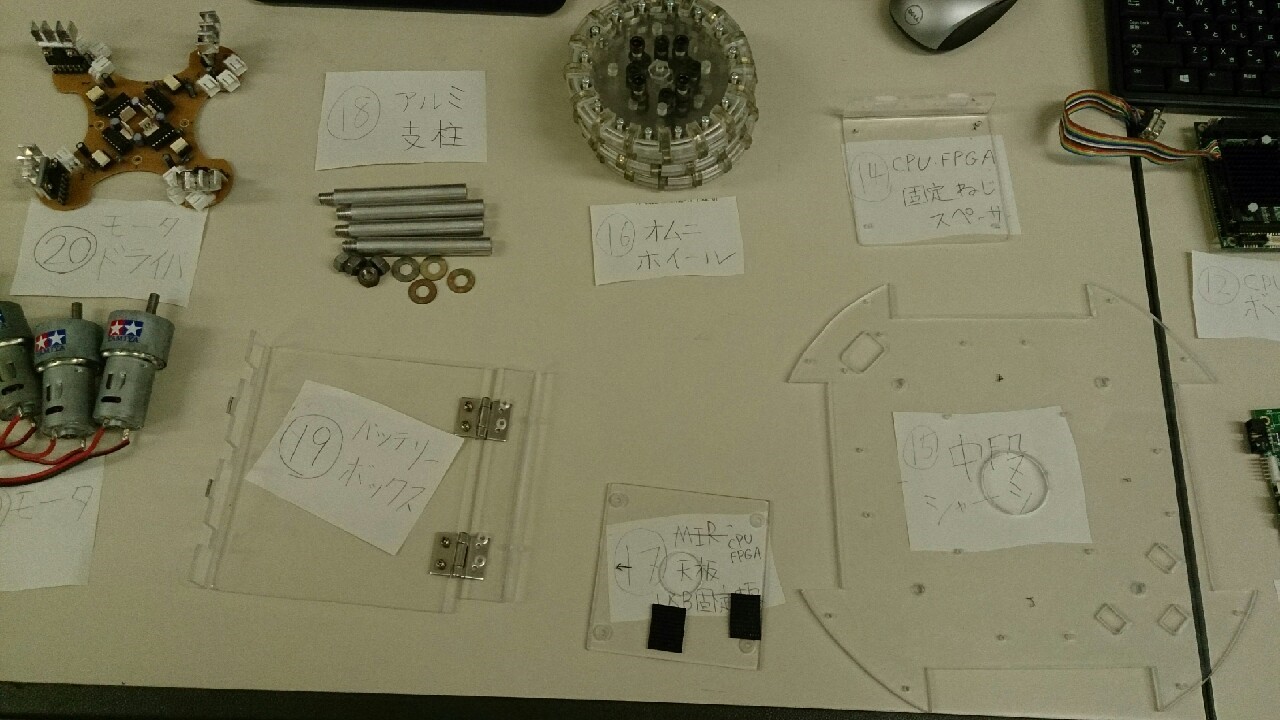 Fig.33 全体パーツ3 |
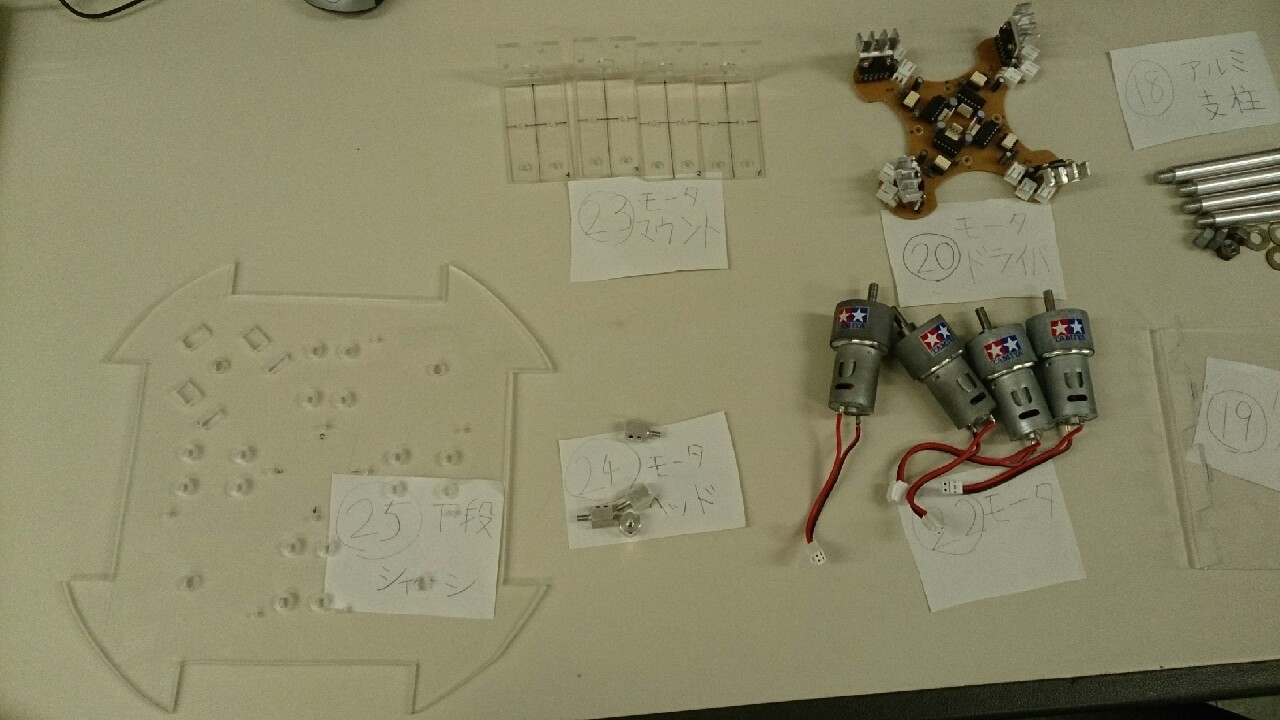 Fig.34 全体パーツ4 |
改善・改良点
MIRS1402は、チームコンセプトである「全方位移動」を実現するために様々な工夫を施した。
Table.2に、コンセプト実現のための変更点を載せる。
| 素子・部品名 | 変更点 | 目的 |
|---|---|---|
| 重心 | 機体内の低い位置にある | 転びにくくするため |
| 速度を上げるため | ||
| 上段シャーシ | 新規に取り付けられている | パイルバンカーを用いて怪盗機の風船を割るため |
| パイルバンカー | 新規取り付けられている | |
| FPGAボード | アクリル板が上の段に設置されていた | USB端子を使うとき、FPGAボードに傷をつけないようにするため |
| 中段シャーシ | 切込みが加わっている | オムニホイールとの接触を回避するため |
| オムニホイール | 自作されていた | 安く済ませるため |
| タイヤの代わりに搭載されていた | 機動力を上げるため | |
| バッテリーボックス | 下段シャーシと蝶番で固定されていた | バッテリー交換をスムーズに行うため |
| モータードライバー | Xの字になっている | モーター設置のエリアを確保するため |
| モーター固定具 | スポンジを挟む | 衝撃を和らげるため |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}