はじめに
本ドキュメントは、体験入学に向けて、標準機を使用したプレ競技会に関する開発計画書である。
競技会内容
今回走行するコースを以下に示す。
スタート地点から2台の機体が直進し(①)、その後与えられた方向へ曲がり、ゴールまでのタイムを競う(②)。
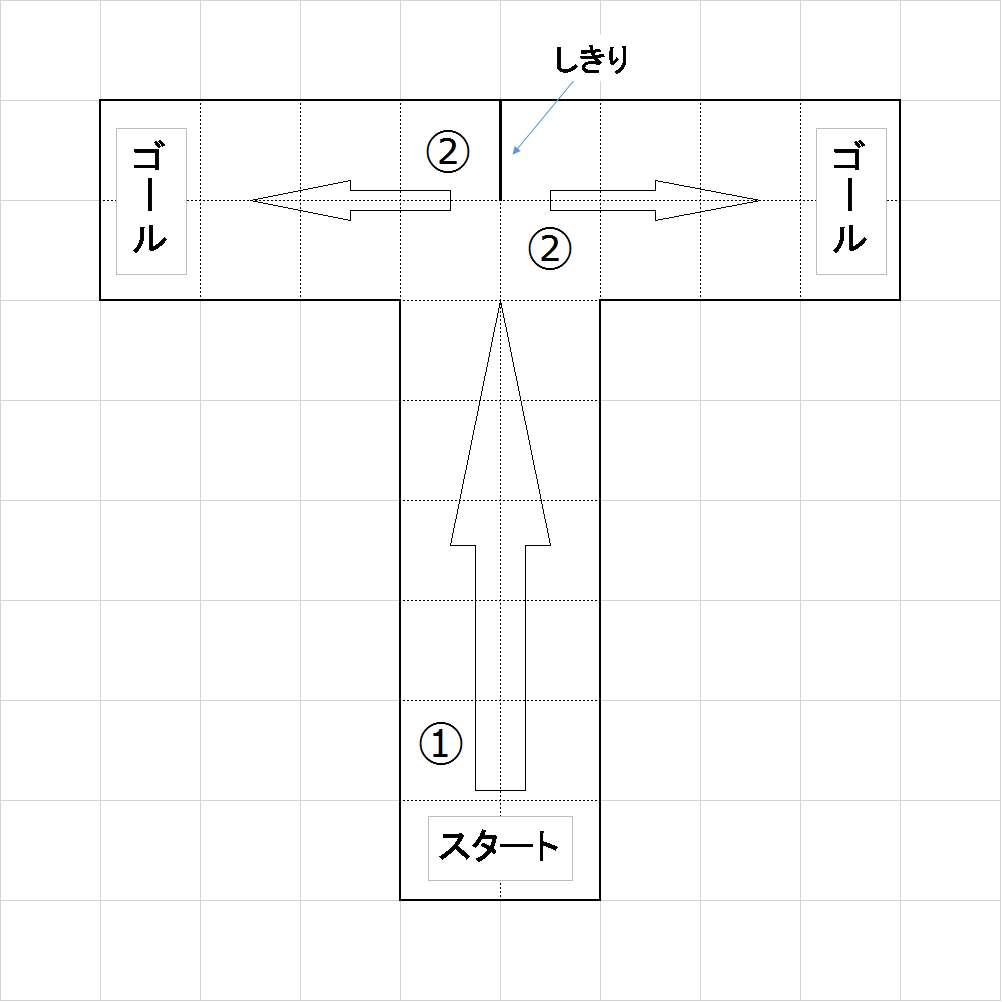
Fig.1:競技会フィールド図
ルール
プレ競技会のルールは以下のリンクを参照する。
MIRS2015プレ競技会 ルール
戦略
プレ競技会では順位に応じてチームメンバーの学業点に加味され、技術点としての加点には、ゴールする(+10%)
壁、対戦相手と無接触でゴールする(+5%)、ゴールにある数字を認識する(+5%)とあるので
MIRS1502では確実に加点項目を全て回収し、それに害さない速度を与えて高順位を目標とする。
リスクを最小限に抑え、プログラムの実装、デモ走行、デバッグという過程を迅速に繰り返すことによって
不要な要素を最小限に抑えつつ素早く改良を続け、確実にゴールをすることを戦略とする。
開発方針
ソースのバージョン管理は、これからの共同開発を考慮してGit(分散型バージョン管理システム)を採用する。
また、Bitbucket(コードホスティングサービス)を採用してメンバー間でソースを共有し、開発効率の向上を
プレ競技会までの開発で体感する。GitとBitbucketについてはメンバーでの勉強会を予定している。
ただし、プレ競技会までの完璧な導入は不可能であるので、これから先の導入のための試用期間として考える。
プログラム概要
プログラムの流れを以下に示す。
-
右or左のコースの情報を標準入力する。
→左折or右折するポイントまで3m直進走行をする。
→壁との距離を0.4mの間隔になるまでゆっくり直進する。
→標準入力に応じて左or右に90°回転走行をする。
→タッチセンサがオンになるまで直進走行をする。
→数字認識がクリアできるまで後進走行をする。
シーケンス番号と、シーケンス内容を以下に示す。
| シーケンス番号 | シーケンス内容 |
|---|---|
| 1 | スタート。3m直進する。 |
| 2 | 前方の壁までの距離を計測 |
| 3 | 壁までの距離が0.4mになるよう直進。 移動距離 = 測定値 - (0.4) [m] |
| 4 | 回転(90度。向きはコースによる。) |
| 5 | 前方に直進。タッチセンサが反応したところで停止(ゴール)。 |
| 6 | 後退(距離は未定、数字認識の精度を見ながら検討する)。 |
| 7 | 正対補正する。 |
| 8 | ROI走査により、画像認識する。 |
| 9 | 画像認識したら時計回りに360度回転して、成功を視覚的に見せる。 画像認識に失敗した場合は、少し後退し、再び画像認識を行う。 |
下記にプログラムのフローチャートを示す。
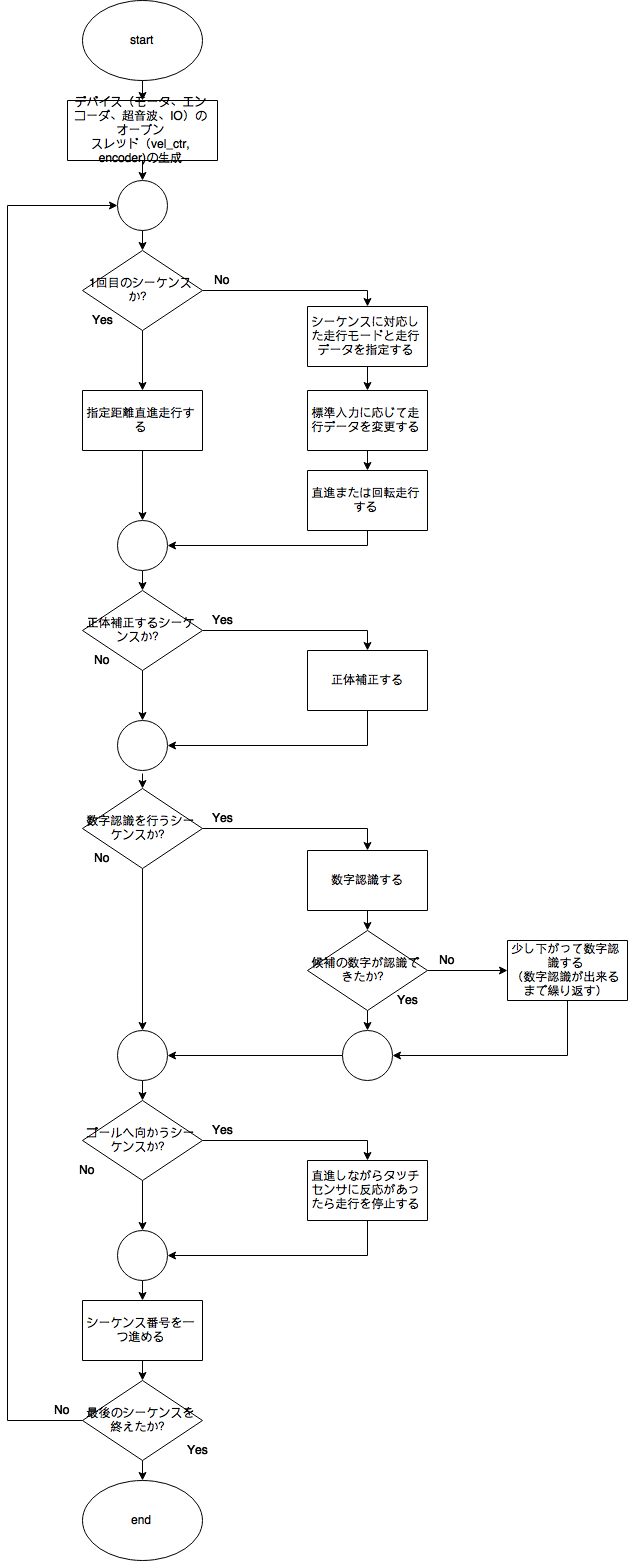
Fig.2:プログラムのフローチャート
作業日程
| 日付 | 午前 | 午後 | 目標 |
|---|---|---|---|
| 7月24日 (金) | (授業) | 標準機能試験 | 標準機能試験の全ての項目を完了し、パラメータ調整も完了させる。 |
| (前期末試験) | |||
| 8月5日 (水) | (前期末試験) | プログラム実装 | ゴールするまでの一連のプログラムを完成させる。 |
| 8月6日 (木) | (終業式) | デモ走行 | 競技会と同じ状況下で8割程度の走行ができることを確認する。 |
| 8月7日 (金) | デモ走行 | パラメータ調整 | パラメータを調整し、速度を上げた走行ができることを確認する。 |
| 8月8日 (土) | 最終調整 | プレ競技会 | 競技会で2位以上を目指す。 |
下記にシステム開発のガントチャートを示す。
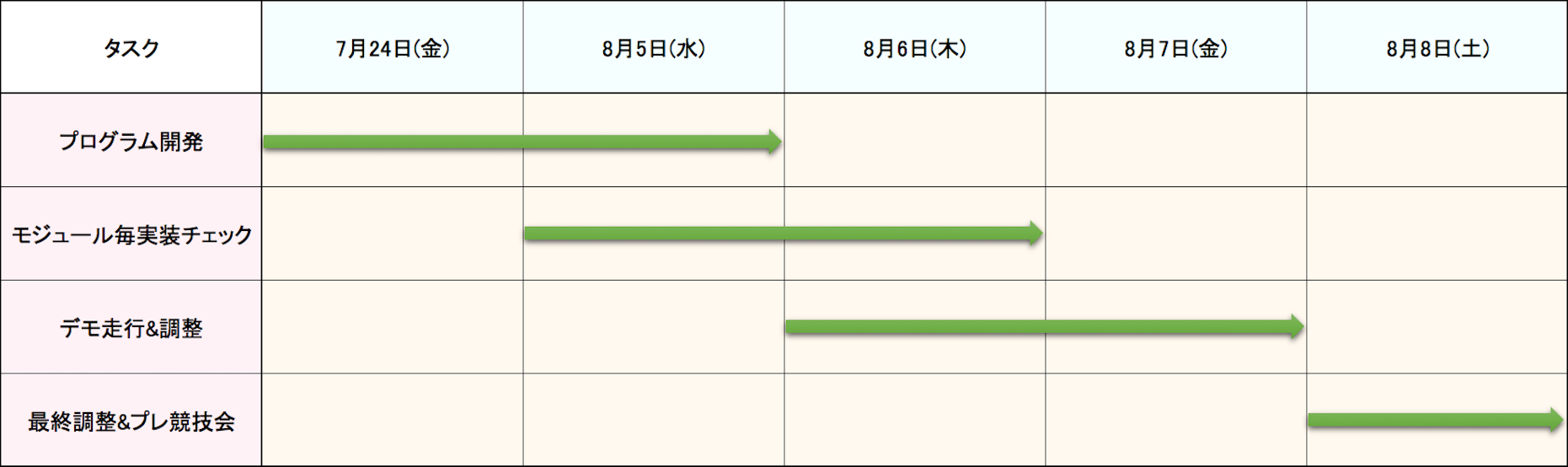
Fig.3:ガントチャート