本ドキュメントについて
本ドキュメントは,MIRS1502のオリジナルのシステムについての提案書である。2015年 MIRS競技会の競技ルールについては、MIRS2015 MIRS競技会 競技規定を参照のこと。
チームコンセプト
「MINIRS~ミニルス~」ロボットを小型化し、オムニホイールと組み合わせることで、細く素早い動きを実現。
競技場内を”すばしっこい”動きで、怪盗をどのチームよりも早く捕まえる。
- L字走行 小型低重心によって安定した高速移動が可能!
- 文字盤認識 webカメラを使用して高速かつ確実な認識を行う!
- 怪盗探索 webカメラと8つの赤外線センサが怪盗を見逃さない!
- 怪盗確保 オムニホイールによる小回りの移動で怪盗を翻弄し確保!
システム概要
今回の競技会で、MIRS1502ではもちろん優勝することを目標とする。そのためには、より高速で確実な動きをする必要がある。
今回の競技では、大きく、
1.現場急行(L字走行)
2.DB(ダイレクションボード)の認識
3.怪盗の追跡と確保
の3つの課題に分けることができる。この3つの課題をクリアするためにシステムを決定した。
3.1 現場急行(L字走行)
今回の競技会では、怪盗が侵入している部屋まで5m×1mの廊下が2本、L字型に構成されている。
そのため、この廊下をより高速に駆け抜ける必要がある。
MIRS1502では、この問題に対し、
- 低重心・小型化で高速に移動できるようにする
- オムニホイールを使用し、コーナーを高速に駆け抜ける
- 超音波センサを使用して位置を確認しながら移動する
3.2 DB(ダイレクションボード)の認識
廊下を渡りきると、廊下の壁に怪盗情報が残されている。これを認識すると加点されるため、認識を行うこととする。
認識には、webカメラを使用して行う。プログラムは、デフォルトの数字認識プログラムを使用する。これは、8月に行われたプレ競技会において、数字認識に成功しているため、流用したほうがよいと考えたからである。
3.3 怪盗の追跡と確保
怪盗が侵入した部屋は、中央に美術品のある4m×4mの大きさの部屋である。この部屋の中に潜んでいる怪盗を発見し、確保しなければならない。
怪盗は
これを達成するに必要な鍵を以下の2つに設定する。
- 上下段シャーシの改良
- 8方位センサを用いたオムニホイールの走行制御の確立
これらの2つの鍵を手に入れた時、MIRS1502は間違いなく優勝できるロボットになる!
上下段シャーシの改良及び設計は小型化をする上でとても重要だと考える。
また、設計の段階で実装するセンサや基盤の大きさを正確に把握する必要がある。
オムニホイールの走行のための制御自体はとても難しいものではない。
しかし、MIRS1502では、怪盗を見つけるために以下の外観図のように8方位に赤外線センサを搭載する。
これにより、怪盗がMIRSの周りのどこにいても見つけることができる。
怪盗を見つけた後、8方位についた赤外線センサが受診する信号の強さにより、怪盗がいる方向を確認し、回転をせずに怪盗まで一直線に追う。
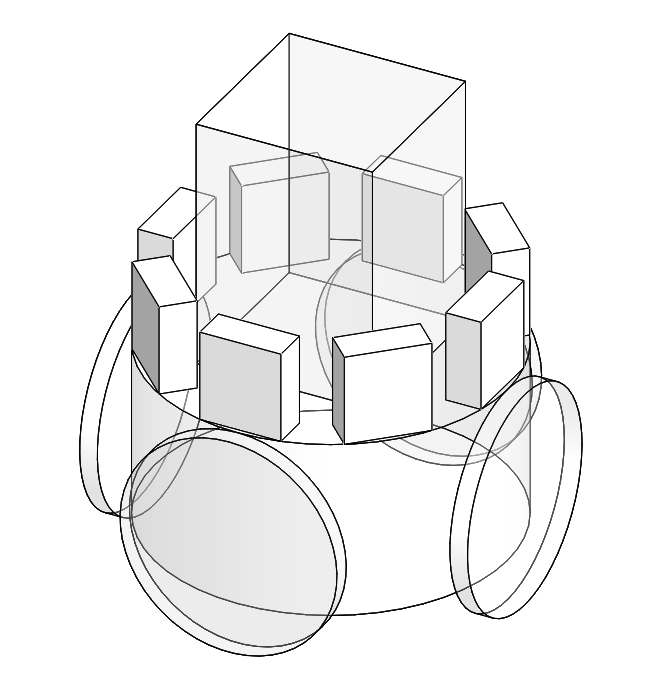
外観図
また、赤外線センサだけでなく、超音波センサも8方位に搭載する。
これは、壁に当たらないように走行するためである。
以上より、MIRS1502では多くのセンサからの信号を処理する必要がある。
そこで、Arduinoを導入し、Arduinoでセンサからの信号の処理を行う。
これらの動きを実現するために、4章での現在の問題点も踏まえて、改良すべき点を5章にリストアップする。
現在のMIRS1502の問題点
メカ
問題点 考えられる原因 ボードタワーとシャーシの穴にズレが生じた。 設計時の寸法ミス。 基板(CPU・ドータボード・FPGA)が取り外ししにくい。 標準機の仕様のため。 電池が固定されていないので、動いてしまう。 固定するつっかえなどがない。 エレキ
問題点 考えられる原因 ちょっとした振動で電源が切れてしまうことがある。 コネクタの接触不良。 重たい処理をさせるとシステムダウンすることがある。 CPUに大きな負荷がかかると電流が不足する。 不具合にはならなかったが、グラウンドにノイズが入ることがある。 グラウンドが共通になっている。 ソフト
問題点 考えられる原因 直進が完全に真っ直ぐではない。
発進時にふらつくことがある。ゲイン調整が不十分。 人が書いたプログラムを勝手に上書きしてしまう事態が起こった。 プログラムの管理が雑。
改良予定一覧
メカ
改良案 期待する効果 小型化(省スペース) 主に、上下段シャーシが関係する。
無駄のない構造にすることにより、見た目を美しくする。
小さいので、壁に当たることによるタッチセンサの補修を少なくする。タワー構造化及び引き出しの追加 小型化に繋がる
また、CPUやドーターボード、FPGAの設置を引き出し型にすることにより、取り出しの簡単化及びメンテナンスのし易さを求める。オムニホイールの導入 回転にかかる時間を省略でき、素早く怪盗を追うことができる。 超音波・赤外線センサマウントの作成 超音波センサと赤外線センサをそれぞれ8つ搭載予定である。そこで、超音波センサ1つと赤外線センサ1つを1セットとし、2つが一緒に入るマウントを作成する。これにより、省スペースにも繋がる。 エレキ
改良案 期待する効果 赤外線センサの導入 今大会より、怪盗に赤外線発信器が搭載されるので、それを感知する。 超音波センサの増設 標準機では超音波センサが2つ搭載されていたが、これを8つに増設し、8方位の障害物を常に感知し壁に当たらない走行を実現する。 モータ制御ボードの設計 オムニホイールを4つ用いて、四輪駆動するため、モータ制御回路が4セット必要となる。
これを1つのボード上へ乗せることにより、省スペースの期待ができる。Arduinoの採用 MIRS1502は多くのセンサを用いる。よって、受け取った信号の処理がミソだと考える。
したがって、センサより受け取った信号の処理を簡単に行えるArduinoを採用する。コネクタの再作成 電源ボード付近のコネクタの接触不良により、電源が切れてしまうという事態が稀にあった。
接触不良のコネクタを見つけるとともに、再発防止のためによし一層丁寧に作り変える。ソフト
改良案 期待する効果 Arduinoによる赤外線・超音波・タッチセンサの処理の一括処理 Arduinoはセンサ系の処理を一括にできるため、プログラム開発の効率化を狙う。 超音波センサを用いた障害物回避プログラムの作成 タッチセンサによる補正の時間を省き、怪盗を見失わぬようにする。 webカメラを用いて怪盗を追跡するプログラムの作成 怪盗を見失わないようにプログラムを作成し、素早く怪盗を捕獲したい。 オムニホイール用の走行プログラムの作成 オムニホイールを使用できるようにする。
回転走行を行う必要がないので、怪盗を追跡する時間を短縮できる。購入予定品一覧
物品名 個数 値段の見積り URL 備考 赤外線センサ 10 200円 http://akizukidenshi.com/catalog/g/gI-04211/ 超音波センサ 4 1600円 http://akizukidenshi.com/catalog/g/gM-08762/ Arduino Mega2560 Rev3 1 5,800円 http://akizukidenshi.com/catalog/g/gM-07381/ アクリル板(3mm) 1 3,900円 http://www.acryl.jp/material/boad.html 1,100(mm) x 1,300(mm) 合計 14,600円