| 名称 |
MIRS1501 システム基本設計書 |
| 番号 |
MIRS1501-DSGN-0002 |
最終更新日:2015.11.09
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2015.11.09 |
鈴木莉子 |
|
初版 |
| A02 |
2015.11.12 |
鈴木莉子 |
|
各項目のタイトル、開発概要にその方法を追加した |
| A03 |
2015.11.13 |
鈴木莉子 |
牛丸先生、大林先生 |
動作シナリオ、文章、予定表の修正 |
目次
- はじめに
- 動作シナリオ
- 機能・性能
- システム構成
- 開発スケジュール
- 購入物品
本ドキュメントは、MIRS1501の第一段階の開発における基本設計書である。
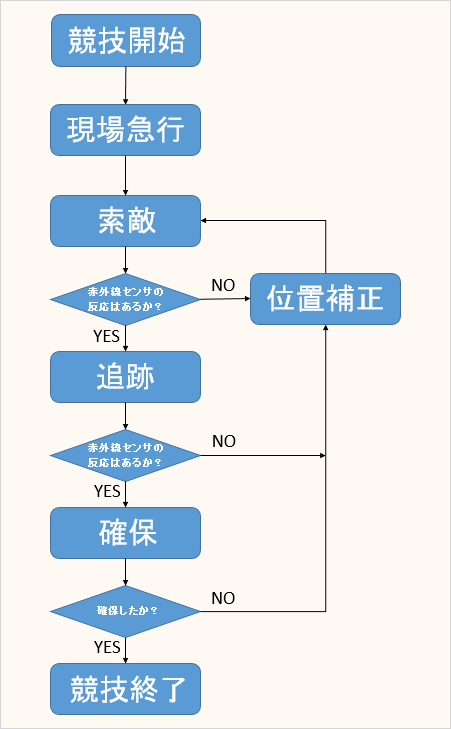
MIRS1501の動作シナリオを以下に示す。
図1 動作シナリオ
- 競技レベル・・・「全クリ」 全ての課題をクリアする。
- 基本機能・・・
- 安定走行のためのシャーシ改良
- YUGOカーブを用いた現場急行
- 数字ボードに衝突後、少し後退して数字認識
- サーバとの通信
- 美術品周りの周回による怪盗の捜索
- 赤外線センサによる怪盗の追跡・確保
- 拡張機能・・・
- 走りながらの数字認識
- カメラでの色認識による怪盗の追跡・確保
- 自己位置認識の導入
- 高い位置に前、左、右の3方向にカメラを設置
- 音声機能の追加
- 性能・・・90cm/sで走行する。
但し、基本機能は第一段階の開発で、拡張機能は第二、第三段階の開発で搭載する。
4. システム構成
- メカニクス構成
- 開発概要
| 開発概要 | 目的・理由 | 方法 |
| 重心を低くする |
機体を安定させるため。 |
バッテリーをシャーシ下段の後方に設置する。(モータボードと下段シャーシの間にスペーサを用いて空間を設け、そこにバッテリーを配置する。) |
| 重心を機体の中央にする |
直進性を良くするため。 |
部品を左右対称にバランスよく配置する。 |
| 部品配置をシンプルにする |
整備性向上のため。 |
基板を手の届く位置に配置する。 |
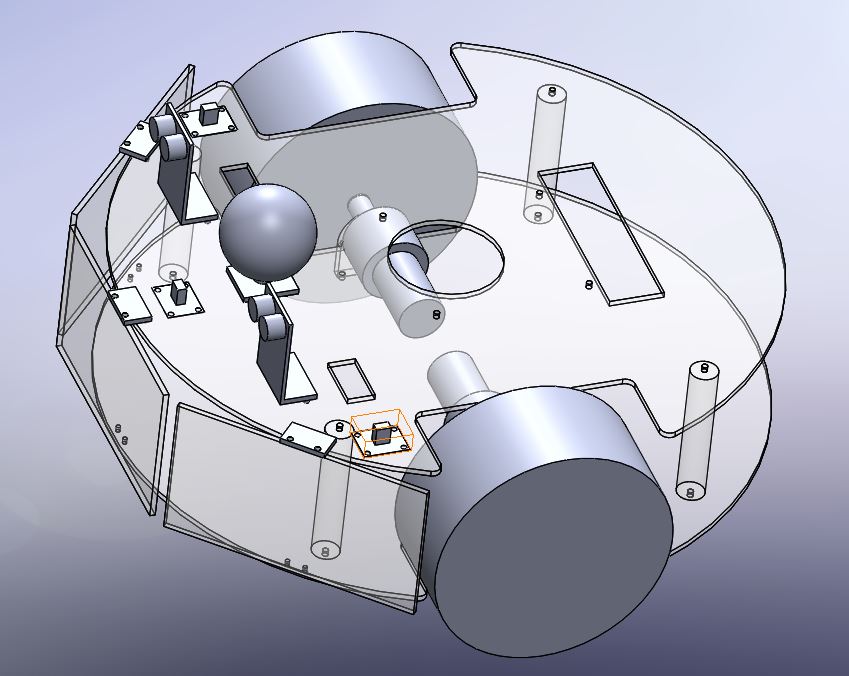
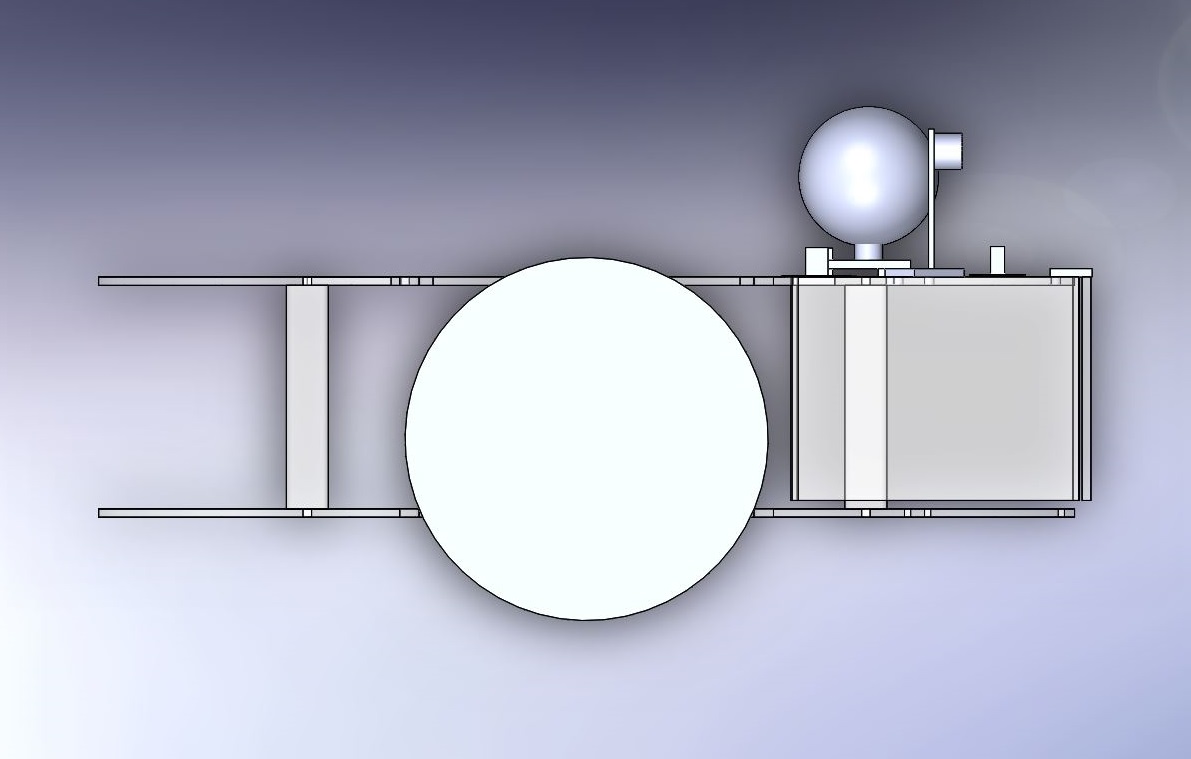
- 機体外形
機体外形を以下に示す。
図2 機体外形
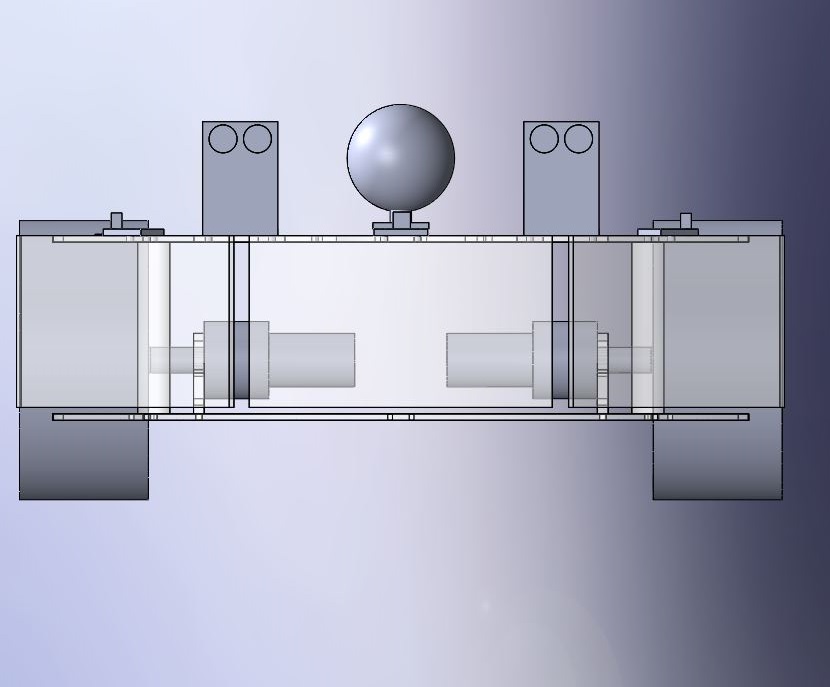
図3 正面図
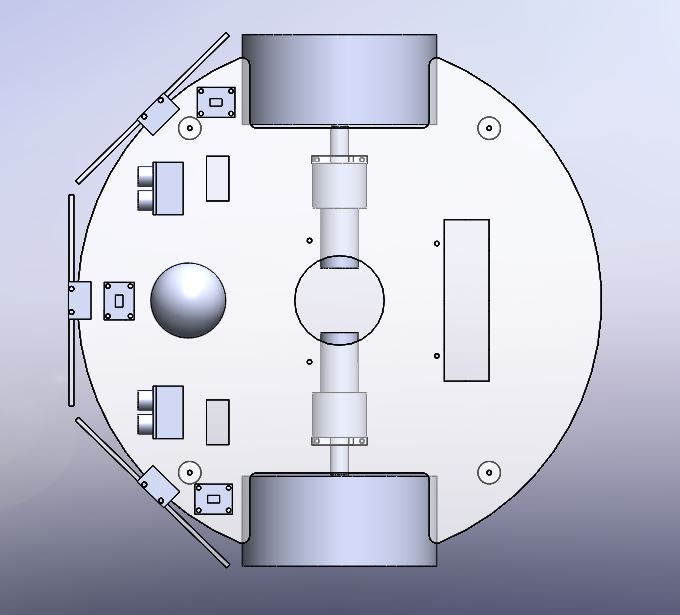
図4 上面図
図5 側面図
- 主要部品一覧
| 部品 | 個数 | 備考 |
| シャーシ上段 |
1 |
|
| シャーシ下段 |
1 |
|
| 支柱 |
4 |
|
| モータ |
2 |
|
| エンコーダ |
2 |
|
| タイヤ |
2 |
|
| バンパ |
3 |
|
| キャスタ |
3 |
|
| モータマウント |
2 |
|
| Webカメラ |
1 |
数字認識用 |
- エレクトロニクス構成
- 開発概要
| 開発概要 | 目的・理由 | 方法 |
| ドータボードの改良 |
11PINを圧着用PINヘッダに変更するため。 |
圧着用PINヘッダを取り付ける。 |
| 11PINケーブルの改良 |
壊れにくいケーブルにするため。 |
圧着用PINヘッダを使用する。 |
| CPUボードにつける変換基板の作成 |
11PINを圧着用PINヘッダに変更するため。 |
ドータボードからの出力をCPUボードに対応したPIN配置で出力する。 |
| 電源ケーブルの改良(分岐用基板の作成) |
壊れにくいケーブルにするため。 |
電源ケーブルからの出力を基板を介して2ヵ所に出力する。 |
| 赤外線センサの作成 |
怪盗の追跡を行うときに利用するため。 |
3PINソケットを取り付ける。 |
| 赤-Ar基板の作成 |
赤外線センサの出力をArduinoに送るため。 |
3PINソケットとArduinoに設置するためのジャンパを取り付ける。 |
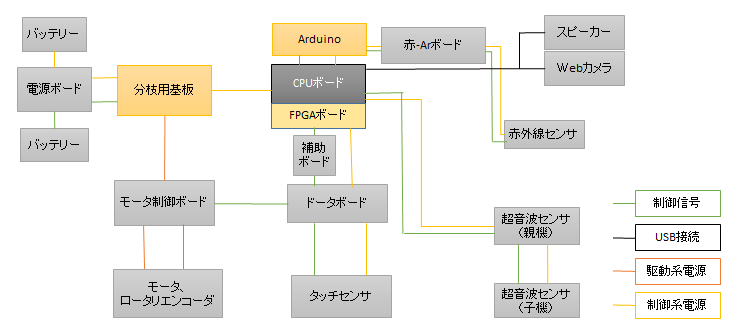
- 構成図
構成図を以下に示す。
図6 エレクトロニクス構成図
- 使用ボード一覧
| ボード | 内容 | 変更点 | 担当者 |
| 電源ボード |
- |
変更点なし |
|
| CPUボード |
- |
変更点なし |
|
| FPGAボード |
- |
変更点なし |
|
| ドータボード |
- |
11PINの2箇所を2×8の圧着用PINヘッダに変更する |
遠藤 |
| モータ制御ボード |
- |
変更点なし |
|
| 超音波センサボード |
- |
変更点なし |
|
| 補助ボード |
PINヘッダの変更に伴いCPUボードにつける変換基板 |
新規作成 |
吉岡 |
| 分岐用基板 |
電源ボードからの出力をCPUボードとモータ制御ボードに分岐する基板 |
新規作成 |
遠藤、山本、吉岡 |
| Arduino MEGA |
- |
昨年度ものを使用する |
|
| 赤-Arボード |
赤外線センサの出力をArudinoに渡す基板 |
新規作成 |
遠藤、山本、吉岡 |
- ソフトウェア概要
- 機能概要
- 現場急行を行う
直進走行とYUGOカーブを用いて、数字ボードがあるところまで走行する。
このとき、走行中に数字認識も行う。
- サーバとの通信
機体に搭載した無線LANを用いて通信を行う。
送信するデータは、現場急行中に認識した数字である。
詳しい内容は、情報が公開され次第決定する。
- 画像処理を行う
数字認識と色認識の2種類の画像処理を行う。数字認識は現場急行時、色認識は怪盗を探すときに行う。
色認識では赤を認識するようにする。
- 赤外線センサで怪盗を認識する
怪盗から発せられている赤外線を赤外線センサを用いて認識する。
赤外線センサのデータ処理は、Arduinoを用いる。
- 怪盗を確保する
赤外線センサからの情報を元に怪盗を追跡し、確保する。
怪盗を見失った場合は自己位置の補正を行い、再び怪盗を探し始める。
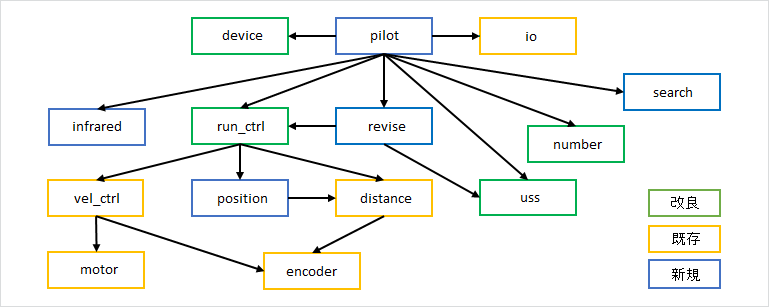
- モジュール構成
モジュール構成図を以下に示す。
図7 モジュール構成図
- モジュール一覧
モジュール一覧表を以下に示す。
| モジュール名 |
機能 |
開発要素 |
| motor |
モータを動かす。 |
既存のものを使用する。 |
| encoder |
エンコーダ値を管理する。 |
既存のものを使用する。 |
| vel_ctrl |
モータの速度制御を行う。 |
既存のものを使用する。 |
| distance |
走行距離を管理する。 |
既存のものを使用する。 |
| io |
ON/OFF IOデバイスのデータを読む。 |
既存のものを使用する。 |
| run_ctrl |
直進・回転・YUGOカーブを行う。 |
精度を向上させる。 |
| uss |
超音波計測を行う。 |
精度を向上させる。 |
| number |
数字認識を行う。 |
走りながら認識できるようにする。 |
| device |
デバイスファイルを Open/Close する。 |
カメラとスピーカーとArduinoを追加する。 |
| infrared |
赤外線センサからのデータを読み込む。 |
新規に作成する。 |
| position |
位置情報を管理する。 |
新規に作成する。 |
| revise |
位置補正をを行う。 |
新規に作成する。 |
| search |
赤色認識を行う。 |
新規に作成する。 |
| pilot |
MIRSの動作全体を制御する。 |
新規に作成する。 |
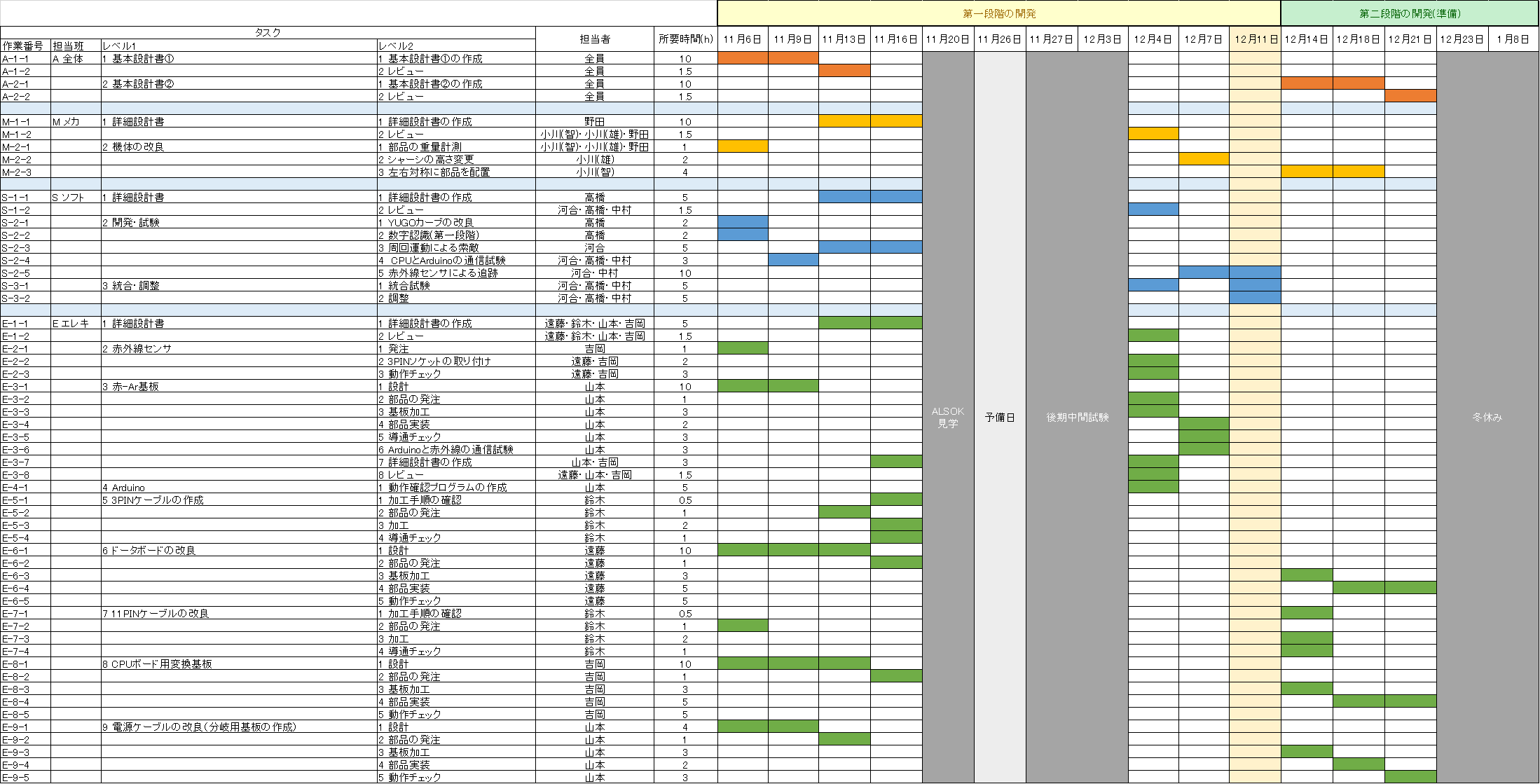
MIRS1501の第一段階の開発スケジュールを以下に示す。
図8 開発スケジュール
MIRS1501ドキュメント管理台帳