安定走行のためのシャーシ改良
現場急行では、狭い道幅での安定した走行が求められる。
機体の重心を低くかつ中心にして機械的なズレを減らし、直進、回転を安定して行うよう設計する。
具体的には、基板などはできるだけシャーシの下段に、そして前後・左右対称になるよう設置する。
但し標準機のシャーシをそのまま使用し、必要に応じて新たに穴を開ける。
YUGOカーブを使った現場急行
YUGOカーブとは、直進・円運動・直進をスムーズに行い、停止することなく現場急行をする走行方法である。
これはプレ競技会で発案・実装し、その機能を存分に発揮することができた。
しかし、ある程度走行速度を上げると不安定になるなど、まだまだ改良が必要である。
そこで、競技会ではさらに精度・速度を良くし、速く確実に現場急行を行うようにする。
図1に現場急行時の軌跡を示す。
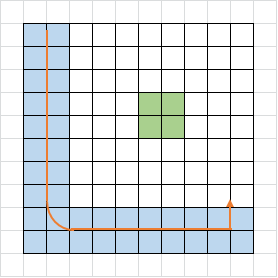
図1 現場急行時の軌跡
参考ドキュメント
標準機デモ用システム開発計画書
走行動作中の数字認識
プレ競技会では、1回戦、決勝戦ともに数字認識を成功させた。
今回の競技会では、数字認識は現場急行タイムと怪盗機確保タイムの両方に関わるとても重要な課題となっている。
まずは競技会のフィールドでプレ競技会と同様の方法(数字ボードにぶつかり、数cm後退して数字を認識する方法)で確実に数字認識を成功させる。
そして次に、極力時間をかけずに数字認識を行うために走りながらの数字認識に挑戦する。
具体的には、数字ボードの数十cm手前から走行と画像処理を並行して行い、数字ボードにぶつかる前に数字認識を完了させる。
但し、走りながらの数字認識は処理が重くなってしまう。
これが走行タイムにどのように影響するか検討し、競技会で採用するかどうか決定する。
赤外線センサとカメラによる発見・追跡
MIRS1501では、WEBカメラと赤外線センサを併用するハイブリッド方式で怪盗機を認識、追跡する。
具体的には、カメラで遠くにいる怪盗機を発見し、赤外線センサで近くにいる怪盗機を追跡する。
カメラは前と左右の計3つ、赤外線センサはセンサの指向性によりMIRSの正面から左右に45度ずつ計8つ取り付ける。
カメラ、赤外線センサの配置を図2に示す。
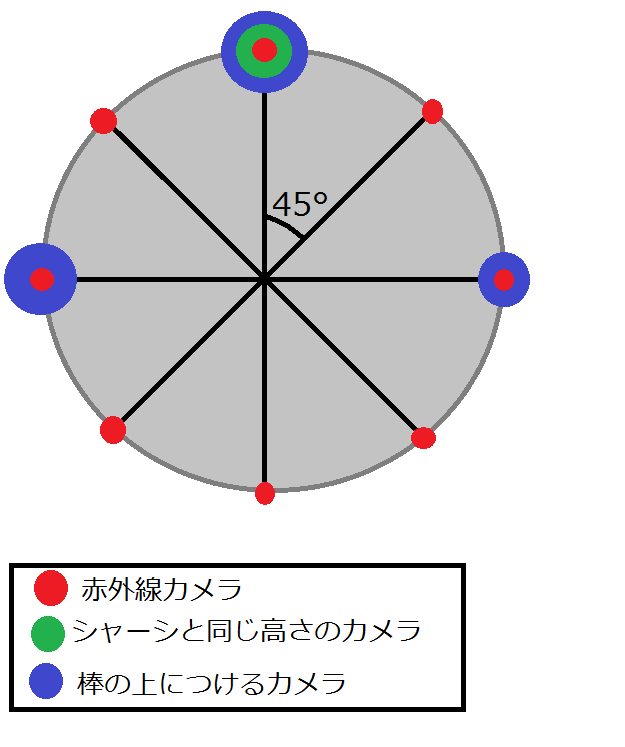
図2 カメラとセンサの配置図
但し、展示室の中央には美術品が設置されている。美術品の裏に怪盗機が逃げてしまったら上記の方法では認識できない。
そのため、機体の中央に高い棒を設置し、その先端にWEBカメラを3つ設置する案も検討する。
そうすることでカメラの認識できる範囲が広くなり、また美術品の裏にいる怪盗機も認識できるようになる。
高い位置に設置したカメラと赤外線センサによる視野範囲を図3に示す。
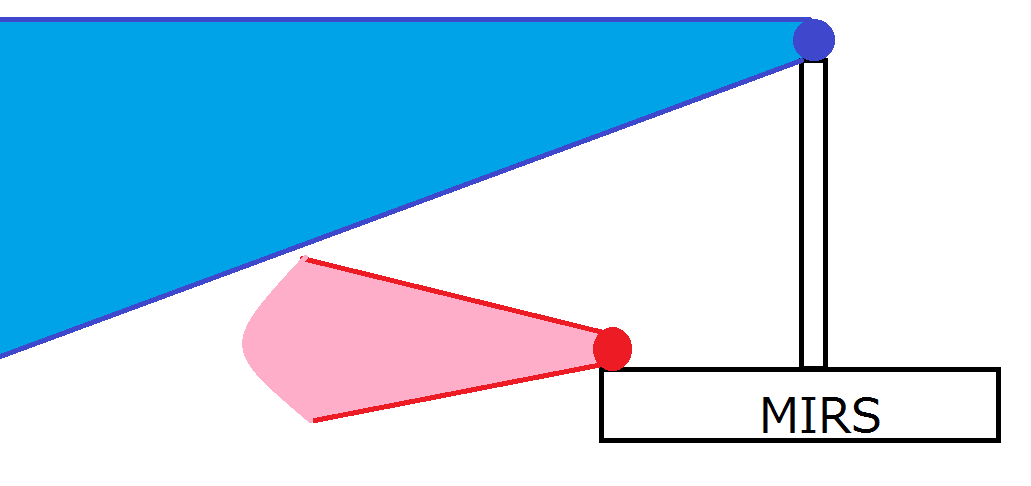
図3 カメラとセンサの視覚範囲
エンコーダと超音波センサによる自己位置補正
自己位置補正は、カメラによる怪盗機の捜索の際、展示室の角に移動するために使用する。
エンコーダの値から現在フィールドのどのあたりにいるか把握し、超音波センサによって位置を補正する。
体当たりによる確保
怪盗機の確保は、シンプルに体当たりで行う。
怪盗機の確保には、怪盗機の走行速度を上回る必要がある。
そのため、走行速度を重視しつつ、かつ2体が接触しても安全な走行を目指す。
機体状況を知らせる音声機能
MIRS1501は、効果音や音声をだすことで"観客を魅せる"パフォーマンスを行う。
また機体の状況に合わせた音声を出すようにすることで、機体の状況を傍から確認することができる。