はじめに
本ドキュメントは、MIRS1403の画像処理モジュールの詳細設計書である。
尚、本ドキュメントにおける設計計画は実質的に廃止した。詳細については、以下を参照。
MIRS1403 ソフトウェア開発報告書
モジュール概略
本モジュールは、画像撮影によりDBの数値認識及び怪盗機の位置認識を行う機能を持つ。
以下に、DBの数値認識及び怪盗機の位置認識についてのフローチャートを示す。
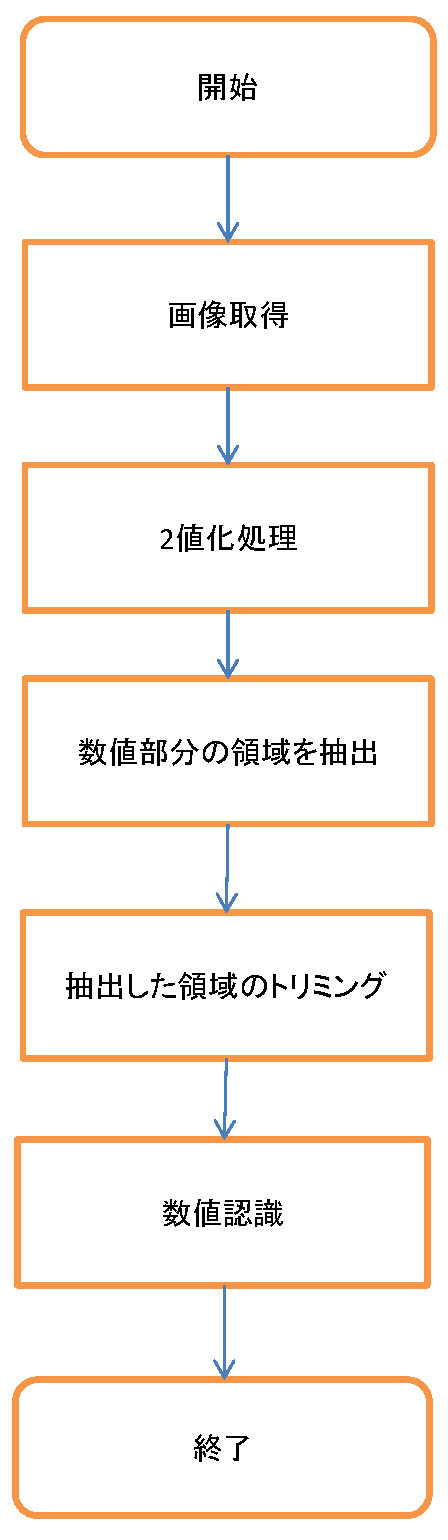
| 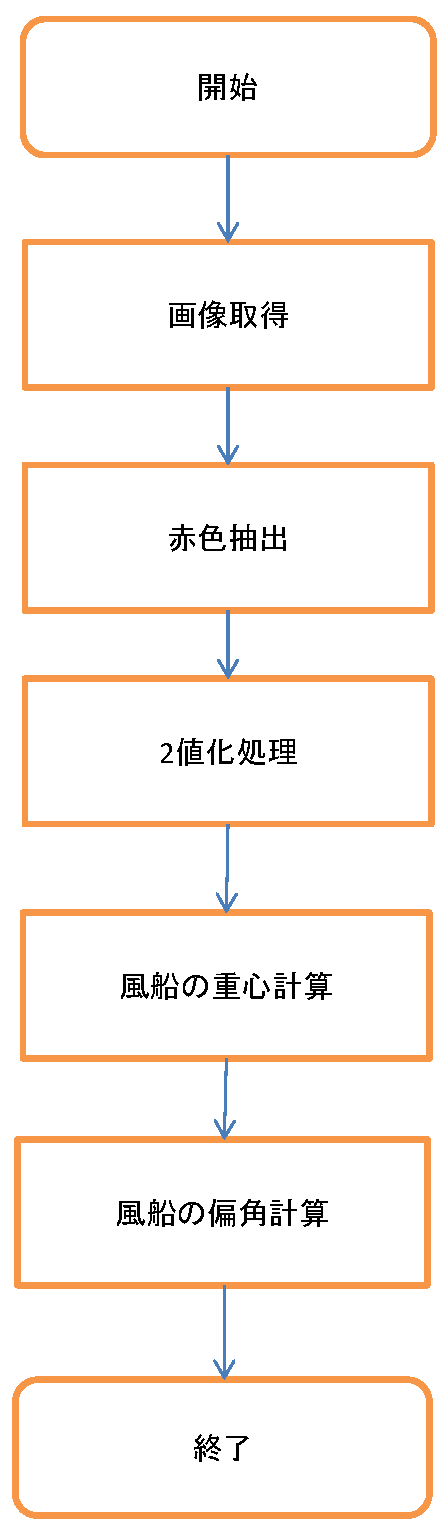
|
モジュール仕様
構造体・列挙体
列挙体:Camera_port_number
構造体:DB_value
構造体:DB_setup
構造体:Thief_data
構造体:HSV_setup
定数
カメラ関連の定数 修飾子 名称 概要 修飾子・戻値の詳細 const int camera_view_angle カメラの視野角 [rad] const int camera_height_pixel カメラの縦ピクセル数 怪盗関連の定数 修飾子 名称 概要 修飾子・戻値の詳細 const double ballon_radius 風船の半径 [m] (風船は円形だと仮定する。) 関数・関数型マクロ
数値認識関連の関数 修飾子・戻値 名称・引数 概要 修飾子・戻値の詳細 引数の詳細 備考 DB_value get_DB_value(USS_value uss_value) DBの数値を取得 数値認識成功時:DBの値を返す。
数値認識失敗時:-1を返す。DBとの距離 MG3S 標準プログラム 関数レファレンスの関数 number_detect(int dist) を参考にして実装する。 怪盗探索関連の関数 修飾子・戻値 名称・引数 概要 修飾子・戻値の詳細 引数の詳細 備考 Thief_data search_thief(Camera_port_number camera_port_number, HSV_setup hsv_setup) 怪盗の捜索 怪盗探索成功時:距離及び偏角を返す。
怪盗探索失敗時:NANを返す。camera_port_number:カメラのポート番号
hsv_setup:HSVの範囲MG3S 標準プログラム 関数レファレンスの関数 number_detect(int dist) を参考にして実装する。
| 名称 | 概要 | 備考 |
|---|---|---|
| Camera_port_number | カメラポート番号列挙体 | |
| メンバ名 | 概要 | 備考 |
| camera_port_forward | 前方カメラのポート番号 | |
| camera_port_backward | 後方カメラのポート番号 |
| 修飾子 | 名称 | 概要 | 備考 |
|---|---|---|---|
| typedef struct {...} | DB_value | DB値構造体 | |
| 型 | メンバ名 | 概要 | 備考 |
| int | .db_value | DBの数値 |
| 修飾子 | 名称 | 概要 | 備考 |
|---|---|---|---|
| typedef struct {...} | DB_setup | DBデータ構造体 | |
| 型 | メンバ名 | 概要 | 備考 |
| const int | .width.min | DB横幅の下限値 | |
| const int | .width.max | DB横幅の上限値 | |
| const int | .height.min | DB縦幅の下限値 | |
| const int | .height.max | DB縦幅の上限値 |
| 修飾子 | 名称 | 概要 | 備考 |
|---|---|---|---|
| typedef struct {...} | Thief_data | 怪盗情報構造体 | |
| 型 | メンバ名 | 概要 | 備考 |
| double | .thief_theta | 機体と怪盗の重心との偏角 |
| 修飾子 | 名称 | 概要 | 備考 |
|---|---|---|---|
| typedef struct {...} | HSV_setup | HSVデータ構造体 | |
| 型 | メンバ名 | 概要 | 備考 |
| const double | .h.min | Hの下限値 | |
| const double | .h.max | Hの上限値 | |
| const double | .s.min | Sの下限値 | |
| const double | .s.max | Sの上限値 | |
| const double | .v.min | Vの下限値 | |
| const double | .v.max | Vの上限値 |
試験仕様
試験用プログラム
デバッグ処理
試験用プログラムの詳細を以下に示す。
| ファイル名 | 試験内容 | 合格基準 | 不合格時の対処法 | 備考 |
|---|---|---|---|---|
| test_get_DB_value | DBの数値認識が可能かを確認する。 適当な距離をおいたDBに対して数値認識を行う。その結果により合否を決定する。 | 数値認識に成功したら合格とする。 | プログラムの修正を行い、再度試験を行う。 上記の方法で改善が見られないようならば、その時に対処法を考える。 | |
| test_search_thief | 怪盗探索が可能かを確認する。 適当な距離をおいた赤い風船に対して怪盗探索を行う。その結果により合否を決定する。 | 怪盗探索に成功したら合格とする。 | HSVパラメータの調整を行い、再度試験を行う。 上記の方法で改善が見られないようならば、その時に対処法を考える。 |
コーディング及び全モジュールについてのドキュメントの承認を得た後、必要と思われるデバッグ処理の詳細を追記する。
プログラム
プログラムについては、以下を参照。
MIRS1403 ソフトウェア開発報告書