はじめに
本ドキュメントはシステム全体の構成、機能・性能、開発要素・要件を明確にし、開発分担とスケジュールを明確にすることを目的とする。
システム概要
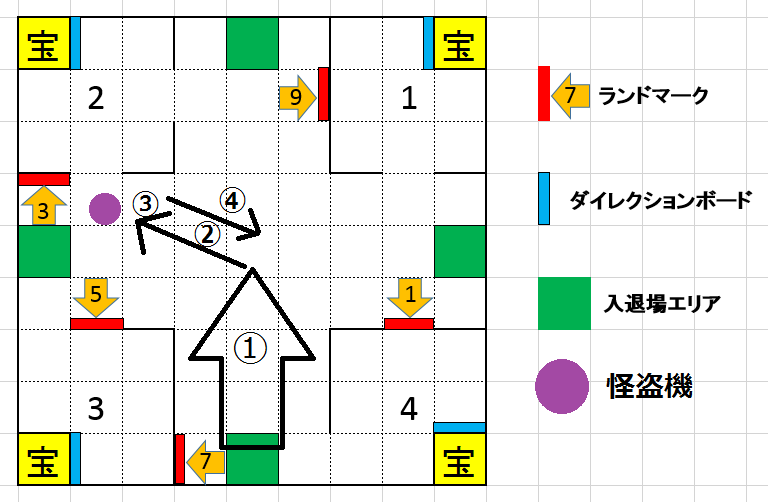
動作シナリオ
1)競技場中央部への移動
競技場中央部へ移動する。
怪盗機が出る迄カメラを旋回させ、待機。
2)怪盗機の追跡
怪盗機を一秒間隔程度の画像処理で追跡。
3)怪盗機への攻撃
パイルバンカーを、風船が割れるまで、画像処理を行いながら繰り返し打ち込む。
4)攻撃終了後
競技場中央部へ戻る。
機能、性能
競技レベル
競技開始2分以内で怪盗機を捕縛する。
機体性能を示す。
・走行性能
オムニホイールにより全方向への移動が可能
・自己位置認識機能
超音波センサーにより分解能0.3cmでの周囲の壁との距離を認識
電子コンパスにより1degree単位での方位を取得可
内蔵したマップを参照
これらにより、自己位置認識を行う。
・カメラ・パイルバンカーユニットの回転機能
カメラ・パイルバンカーユニットを回転させることによって方位を変えずに怪盗機の追跡、攻撃が可能
・追尾機能
画像処理により怪盗機を追尾する
・パイルバンカー機構
パイルバンカーにより遠距離の怪盗機へ攻撃可能
システム構成
5.1 ハードウェア
構成概要
構成概要を以下の表に示す。概観図
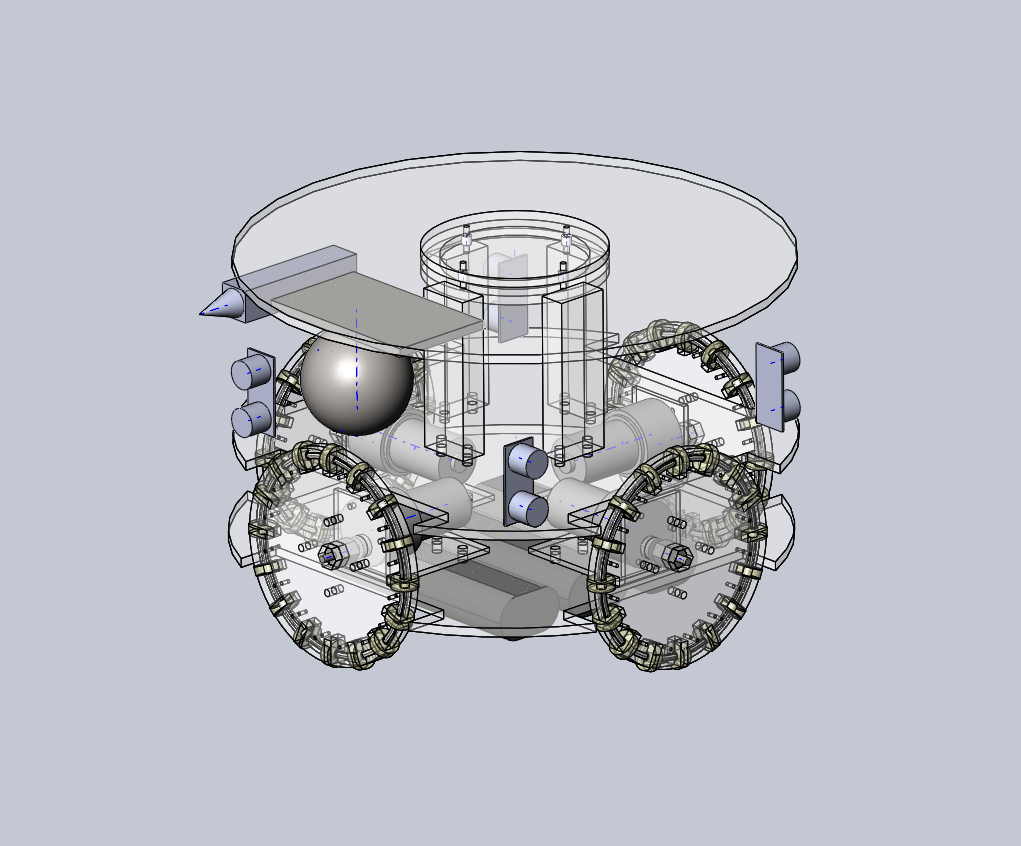
CADによる概観図を以下の図に示す。主要部品表
主要部品表を以下の表に示す。
| 構成 | 内容 |
|---|---|
| オムニホイール | 全方位移動する。 |
| シャーシ | 3段構成にする。 |
| 支柱 | 各シャーシを支える。 |
| パイルバンカー | 風船を割る。画像認識だけでなくタッチセンサも併用して射出するタイミングをみる。 |
| 部品 | 用途 | 内容 | 個数 | 責任者 |
|---|---|---|---|---|
| オムニホイール | 全方位に移動する。 | 設計し、作成する。 | 4 | 藤原 |
| 上段シャーシ | パイルバンカー、カメラ搭載。 | 設計し、作成する。 | 1 | 戎 |
| 中段シャーシ | 各種ボード類搭載。 | 設計し、作成する。 | 1 | 戎 |
| 下段シャーシ | モータ、モータ制御ボード搭載。 | 設計し、作成する。 | 1 | 戎 |
| 支柱 | 各シャーシを支える。 | 設計し、作成する。 | 8 | 加藤 |
| パイルバンカー | 怪盗機の風船を割る。 | 設計し、作成する。 | 1 | 藤原 |
| カメラ | 怪盗機を捕捉する。 | 既存のものを取り付ける。 | 1 | - |
構成概要
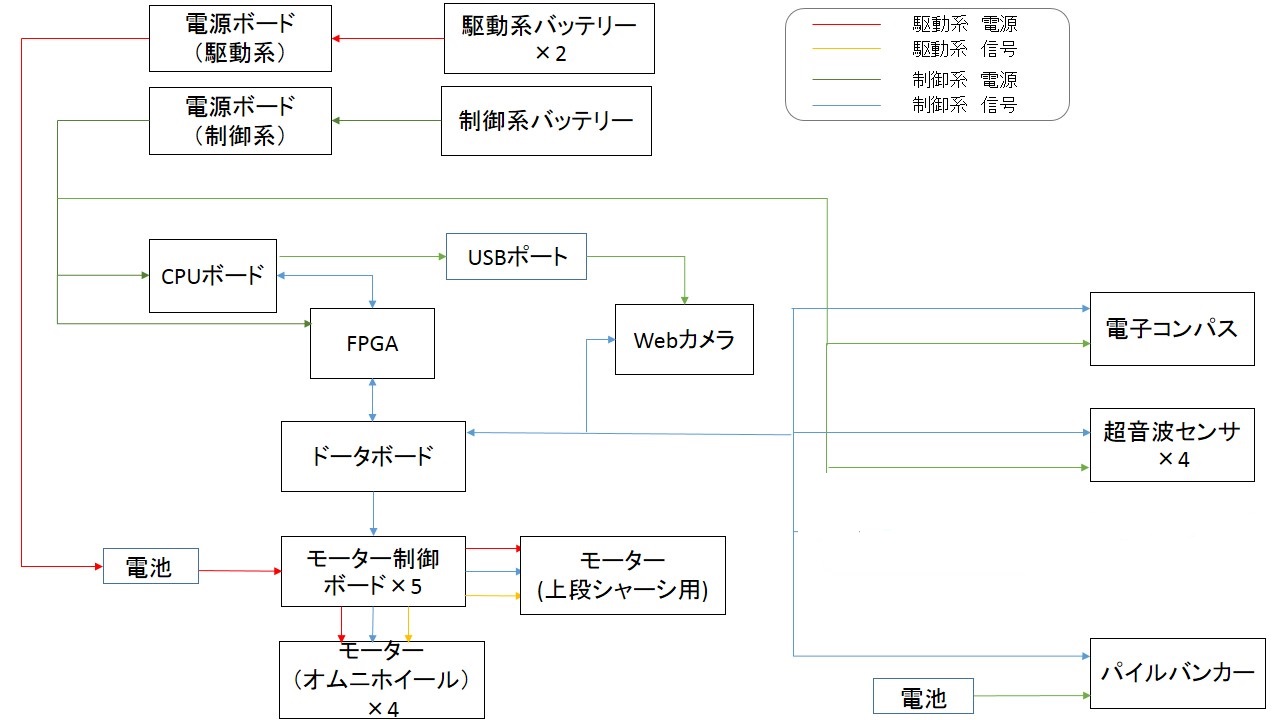
構成概要を以下の表に示す。構成図
構成図を以下に示す。追加部品
追加部品を以下に示す。
| ボード | 内容 | 変更点 | 個数 | 責任者 |
|---|---|---|---|---|
| 電源ボード(駆動系) | 2個のバッテリーから安定した電圧を確保する。 | オムニホイール使用に伴い、モータを4つ搭載する。既存の電源ボードでは対応できないため新規作成。 | 2 | 廣瀬 |
| 電源ボード(制御系) | 1個のバッテリーから安定した電圧を確保する。 | - | 1 | 廣瀬 |
| CPUボード | - | - | 1 | - |
| FPGAボード | - | FPGAボードの内容を書き換える。 | 1 | 大山 |
| モータ制御ボード | モータドライバによってモータの正転/逆転を制御する。 | モータドライバー | 5 | 太田 |
| ドータボード | FPGAボードと各センサやボードを繋ぐ。 | FPGAを書き換えるため使用するピンを変える。 | 1 | 太田 |
| ステッピングモータ制御ボード(上段シャーシ回転用) | モータの正転/逆転と角度を制御する。 | - | 1 | 太田 |
| パイルバンカー制御ボード | コンデンサの充電/放電を制御する。 | - | 1 | 廣瀬 |
| 部品 | 使用箇所 | 個数 | 備考 |
|---|---|---|---|
| モータドライバ | モータ制御ボード | 5 | |
| ヒートシンク | モータ制御ボード | 5 | |
| ステッピングモータ | 上段シャーシ | 1 | |
| 超音波センサ | - | 4 | |
| 電池 電池ボックス | モータドライバ使用のため昇圧 | ||
| 電子コンパス | - | 1 |
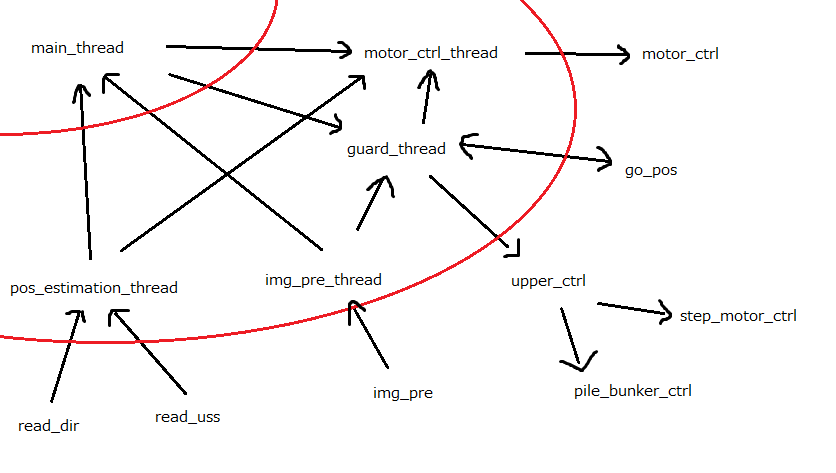
構成概要
ソフトウェアの概要を以下の図に示す。モジュール一覧
モジュールの一覧を以下の表に示す。
| モジュール名 | 概要 |
|---|---|
| main_thread | メインスレッド 全体の制御を行う |
| pos_estimation_thread | 自己位置認識スレッド 自己位置認識と角度修正を行う |
| guard_thread | 警備スレッド 巡回及び怪盗機の探索、攻撃を行う |
| motor_ctrl_thread | モーター制御スレッド |
| img_pre_thread | 画像処理スレッド |
| motor_ctrl | モーターを制御するモジュール |
| go_pos | 指定した位置に移動するための演算を行うモジュール |
| upper_ctrl | 上部シャーシ系を制御するモジュール |
| step_motor_ctrl | ステッピングモータを制御するモジュール |
| pile_bunker_ctrl | パイルバンカーを制御するモジュール |
| img_pre | 画像処理を行うモジュール |
| read_uss | 超音波センサを読み取るモジュール |
| read_dir | 電子コンパスを読み取るモジュール |