| 名称 | システム基本設計書 |
|---|---|
| 番号 | MIRS-DSGN-0003 |
最終更新日:2014.11.21
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2014.11.13 | 西留,眞野 | 初版 | |
| B01 | 2014.11.21 | 西留,眞野 | 大沼先生 | 状態遷移図の追加、各構成概要の変更、画像の修正 |
| 構成要素 | 内容 | 担当者 |
|---|---|---|
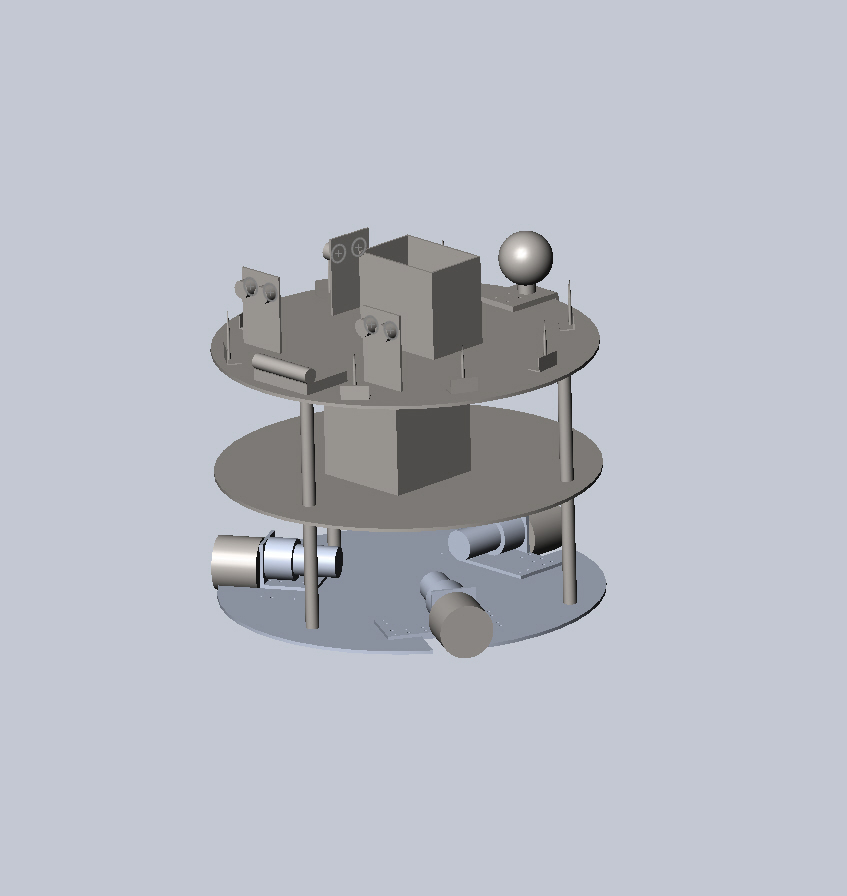
| タイヤ | オムニホイールを3つ取り付ける。オムニホイールとモータを繋ぐシャフトを作成する。 | 佐野,渡邊 |
| シャーシ | シャーシの設計を行い、それに従ってアルミ複合板で作成する。 | 渡邉 |
| バンパー | バンパーを設計、作成する。 | 伊藤,渡邊 |
| 針の突出機構 | 機体の中央に巻きとり装置を配置する。また、全方向に針を取り付け、巻き取り装置と上手く繋ぐ。 | 伊藤,佐野,渡邉 |
| 支柱 | 中・上段シャーシをつなげるために作成する。 | 佐野,渡邊 |
| 部品 | 用途 | 個数 |
|---|---|---|
| オムニホイール | 機動力増加のため | 3 |
| シャフト | オムニホイールとモータをつなげるため | 3 |
| シャーシ上段 | 1 | |
| シャーシ中段 | 1 | |
| シャーシ下段 | 1 | |
| バンパ | タッチセンサを反応させるため | 8 |
| 巻き取り部 | 針の突出機構の巻き取り用のモータ、ギアボックスで糸を巻き取る為 | 1 |
| 針取り付け部 | 機体に針を取り付ける為 | 9 |
| 支柱 | 中・上段をつなげるため。 | 4 |
| 構成 | 内容 | 担当者 |
|---|---|---|
| モータ・モータドライバ | 新機体でオムニホイールを運用するにあたり、負荷に合わせて適切なモータとモータドライバを選択する。これに合わせてモータ制御ボードを新規作成する。 | 宇佐美,高井 |
| パトランプ・破壊機構の制御部 | パフォーマンス用のパトランプと、針の突出機構の巻き取りに使うモータを制御するための回路を作成する。。 | 宇佐美 |
| I/Oポート | モータ・エンコーダ・タッチセンサのチャンネル増加に伴い、ドータボードを新規作成する。また、これに合わせてソフト班と連携し、FPGAボードのプログラム構成や、デバイスドライバも変更する。 | 宇佐美,尾関 |
| ボード | 内容 | 変更点 |
|---|---|---|
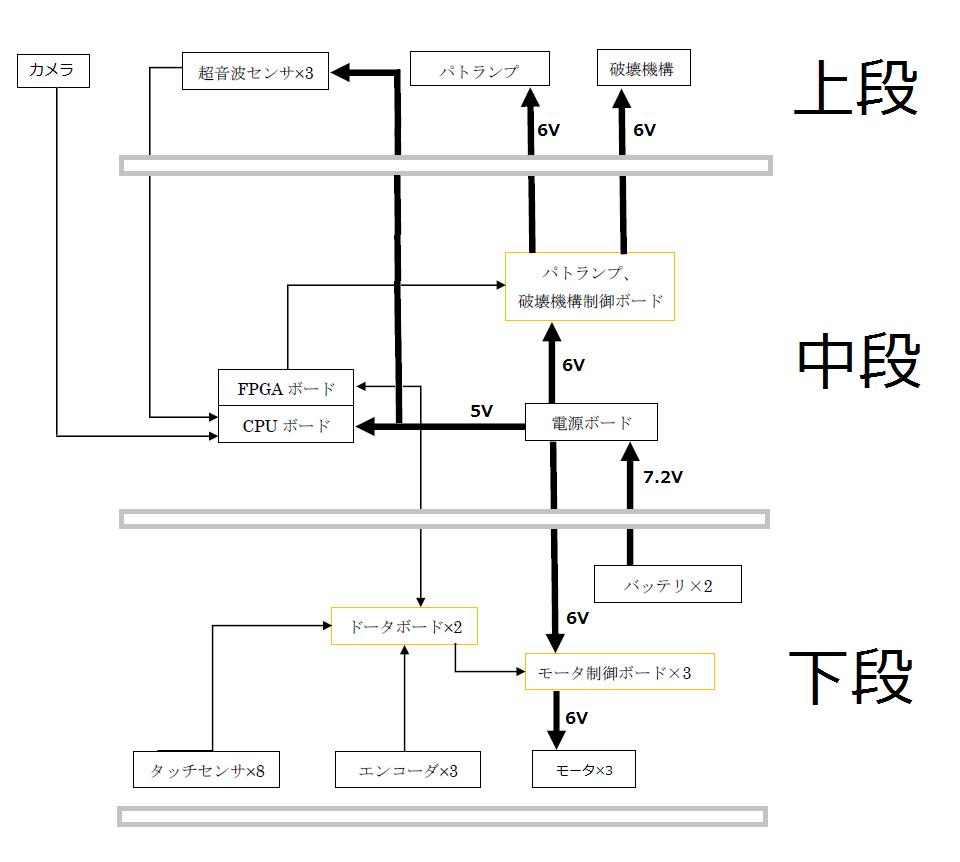
| 電源ボード | 2個のバッテリーから、それぞれ5V(制御系)、6V(駆動系)の安定した電圧を確保する。 | 破損個所があるため、修理する。 |
| CPUボード | - | 変更点なし。 |
| FPGAボード | - | モータが3つになったこと、針の突出機構の部分での回路の追加などを考慮してプログラムを変更する。 |
| ドータボード | モータ制御ボード(2ch×3枚)、エンコーダ(2ch×3枚)、タッチセンサ(1ch×9個)の計21chと、FPGAボードの接続をそれぞれ中継する。走行モータ制御ボード・エンコーダ接続部、タッチセンサ接続部の2枚構成。 | 必要チャンネル数の増加に伴い、独自のものを設計、作成する。 |
| モータ制御ボード | モータドライバによってモータの正転/逆転を制御する。モータが3個あるので3枚作成。 | 使用するモータ・モータドライバが決定次第、新規開発。各班との情報交換をしながら設計、試験、作成をする。 |
| パトランプ・破壊機構制御ボード | パトランプのON/OFFと、巻き取り部(破壊機構)正転/逆転制御を行う。 | 新規作成。パトランプのON/OFFにはリレーの使用を検討。巻き取り部の回路構成は、既存のモータ制御ボードをもとに、トルクチューンモータの特性に合わせて一部変更する予定。 |
| 超音波センサボード | 超音波による距離計測に用いる。親機1台、子機2台を使用予定。 | 廃材から使えるものを選定し、なるべく多く確保する。なお、親機1台を含めて3台確認済み。 |
| 部品 | 使用部分 | 個数 | 備考 |
|---|---|---|---|
| モータドライバ | 走行モータ制御ボード | 5 | 使用するモータドライバは試験、選定中。試験用1個、予備1個、通常使用3個。 |
| ヒートシンク | 走行モータ制御ボード | 4 | 予備1個、通常使用3個。加工が必要なため予備を考慮する。 |
| タッチセンサ | - | 6 | 全方位にタッチセンサをつける。 |
| パトランプ | - | 1 | 高井の提供 |
| モジュール | 内容 | 備考 |
|---|---|---|
| デバイスドライバ | デバイスのオープン | 標準プログラムを変更 |
| タッチセンサ | タッチセンサの状態の確認 | 標準プログラムと同じ |
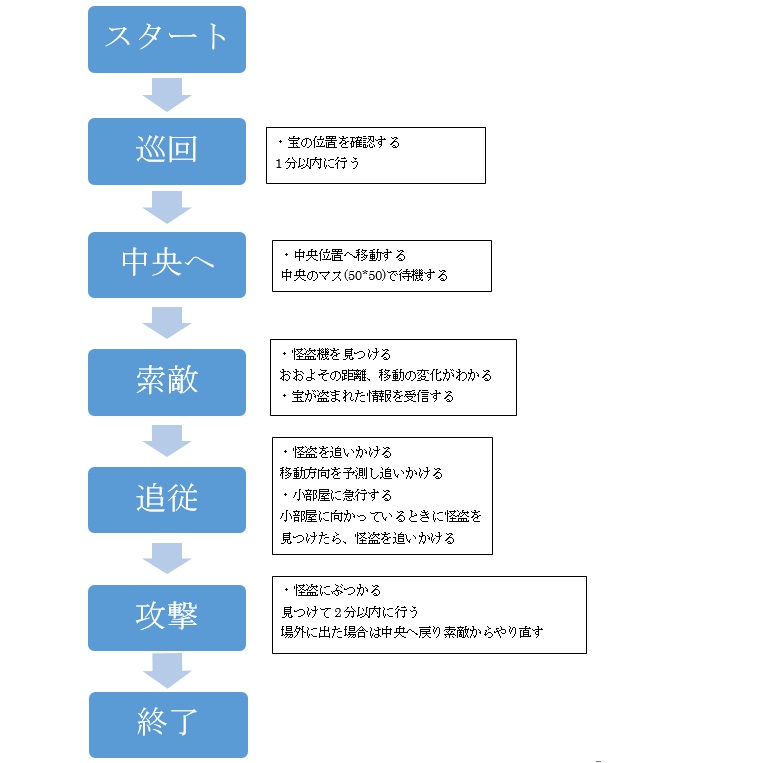
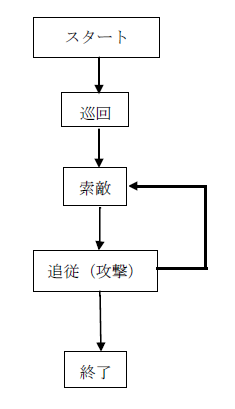
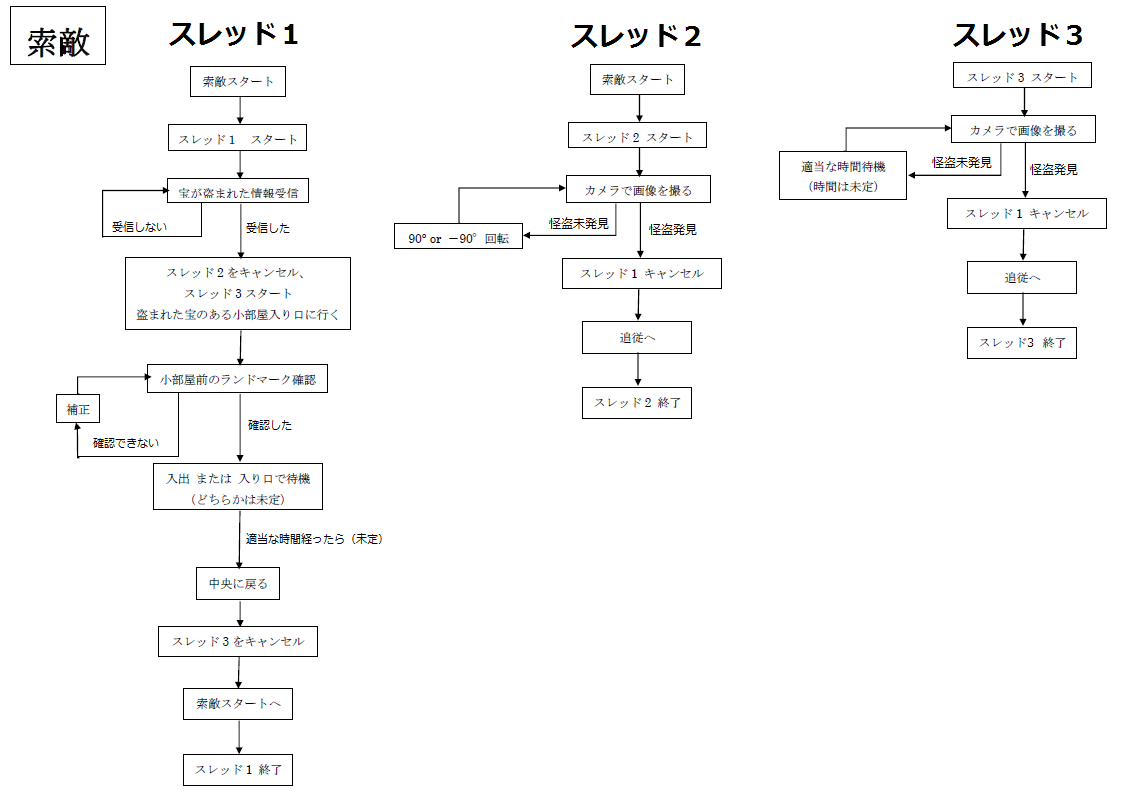
| 怪盗索敵 | カメラで画像を複数枚撮り怪盗の発見をする。複数枚の画像から、怪盗の動き(方向や速度、距離など)を解析する。 | 新規作成 |
| 数字認識 | 画像から数字を得る。 | 標準プログラムと同じ |
| カメラ | 画像を撮る | 新規作成 |
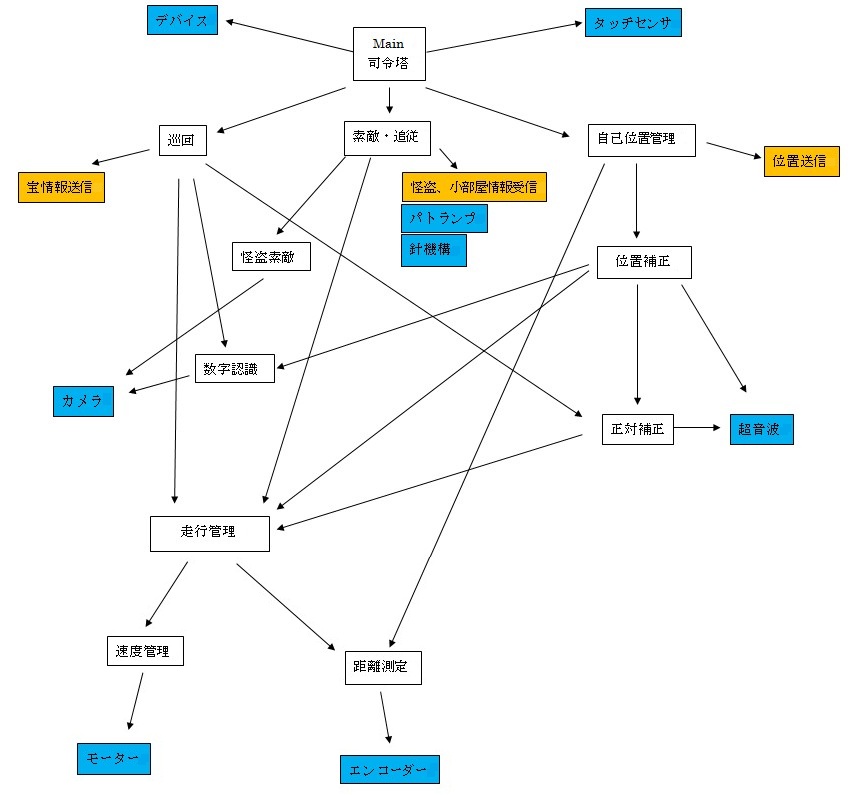
| 情報の送受信 | 宝の情報を送信、盗まれた宝の情報の受信、自己位置の送信 | 新規作成 |
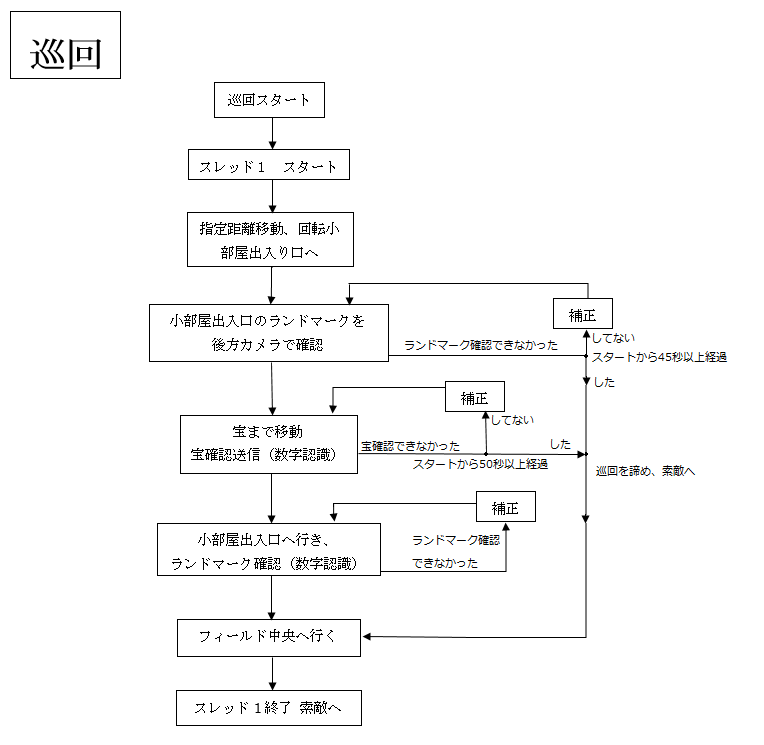
| 巡回 | 決められた移動をして巡回する。 | 新規作成 |
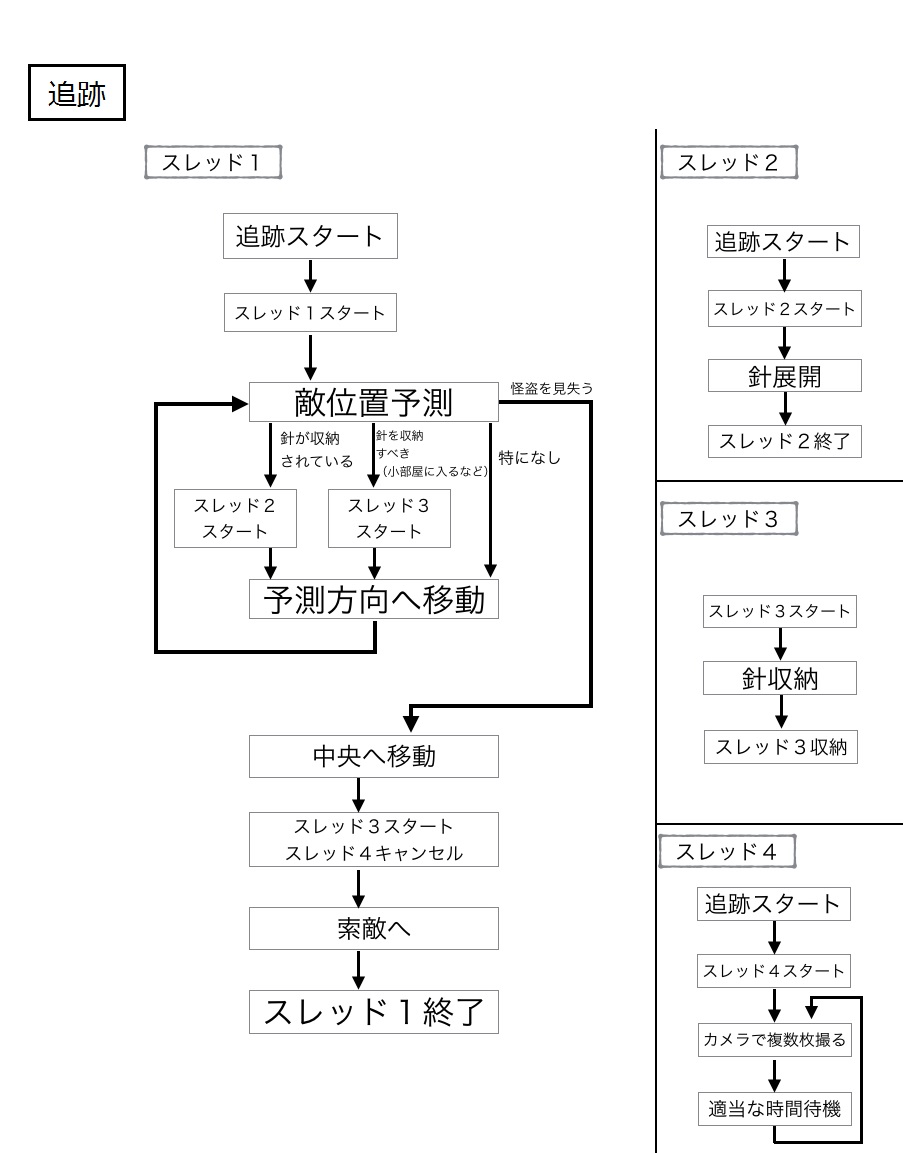
| 追跡 | 怪盗を追跡する。 | 新規作成 |
| 自己位置管理 | エンコーダの値を変換したもの(モジュール:距離測定)を中心に自己位置管理をする。モジュール:位置補正やランドマークによる補正をする。壁がある、回転しているなどの判断もする。 | 新規作成 カーペットタイル1枚の精度を目標とする。 |
| 位置補正 | 正対補正、超音波センサにより自己位置を補正する。 | 新規作成 |
| 針機構 | 針の展開、格納 | 新規作成 |
| パトランプ | パトランプを光らせる。 | 新規作成 |
| 走行管理 | 標準プログラムを変更 | |
| 速度管理 | 標準プログラムを変更 | |
| 距離測定 | 標準プログラムを変更 | |
| モータ | 標準プログラムを変更 | |
| エンコーダ | 標準プログラムの変更 | |
| 超音波 | 標準プログラムの変更 |