| 名称 |
MIRS13CP 標準機競技プログラム開発計画書 |
| 番号 |
MIRS13CP-PLAN-0003 |
最終更新日:2013.09.30
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2013.09.20 |
大川小鉄 |
|
初版 |
| A02 |
2013.09.30 |
大川小鉄 |
出川先生 |
|
目次
1.はじめに
本ドキュメントは、体験入学でのMIRSデモ競技会に向けて、MIRS13CP標準機を用いた戦略・プログラム設計・開発工程について記したドキュメントである。
2.基本戦略
今回のコースを元に、さまざまな状況でゴールを目指せるようにした。
今回のコースを第一に考えているので、今回のコースに特化してある。
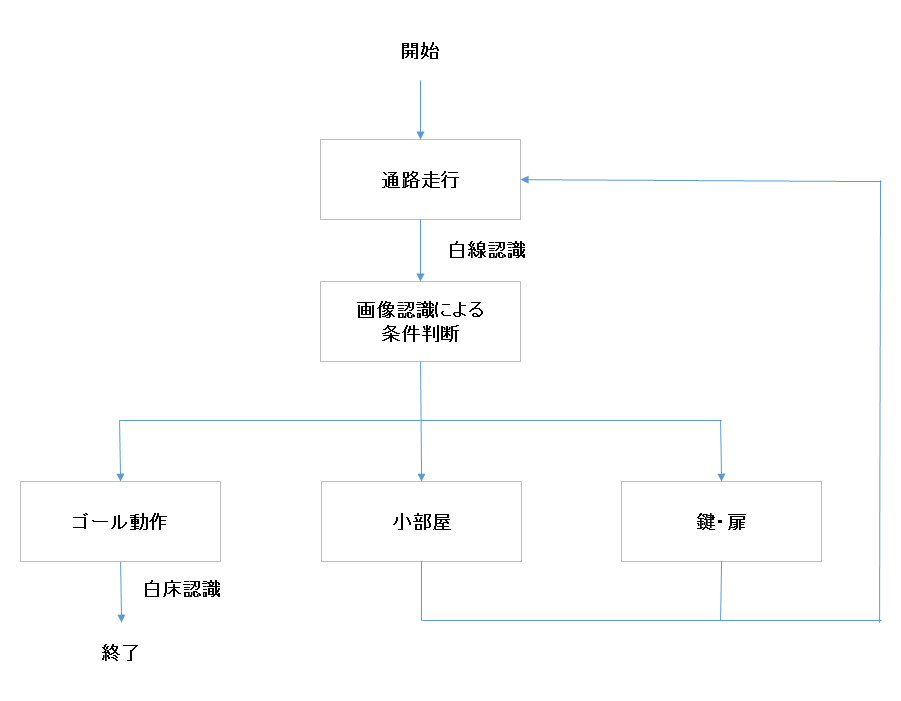
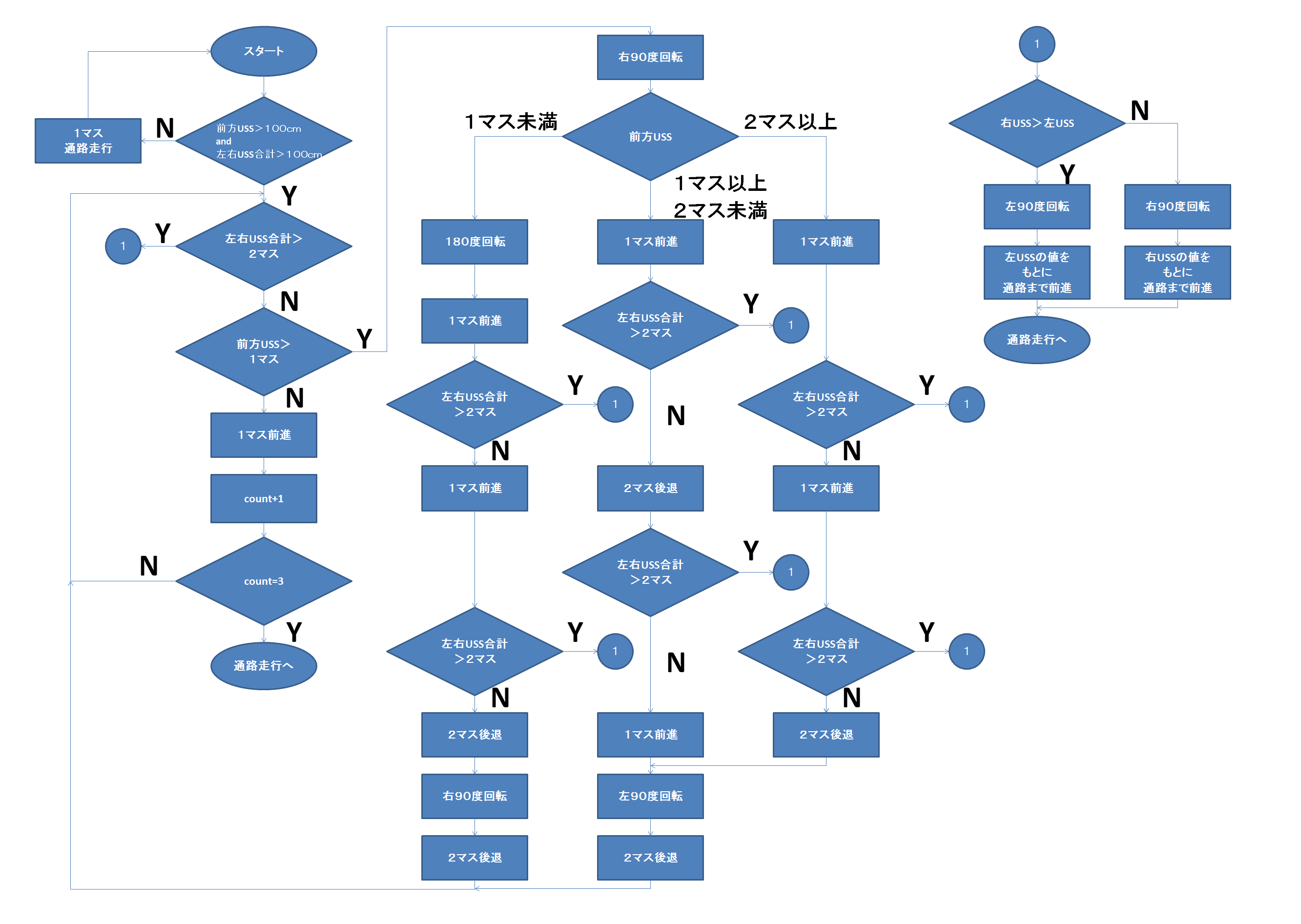
3.動作の流れ
プログラムのフローチャートを下図に示す。MIRS13CPでは、各機能をモジュール化して、必要に応じて呼び出す形を取る。各機能の動作の流れは4.プログラムの詳細設計に示す。
4.プログラムの詳細設計
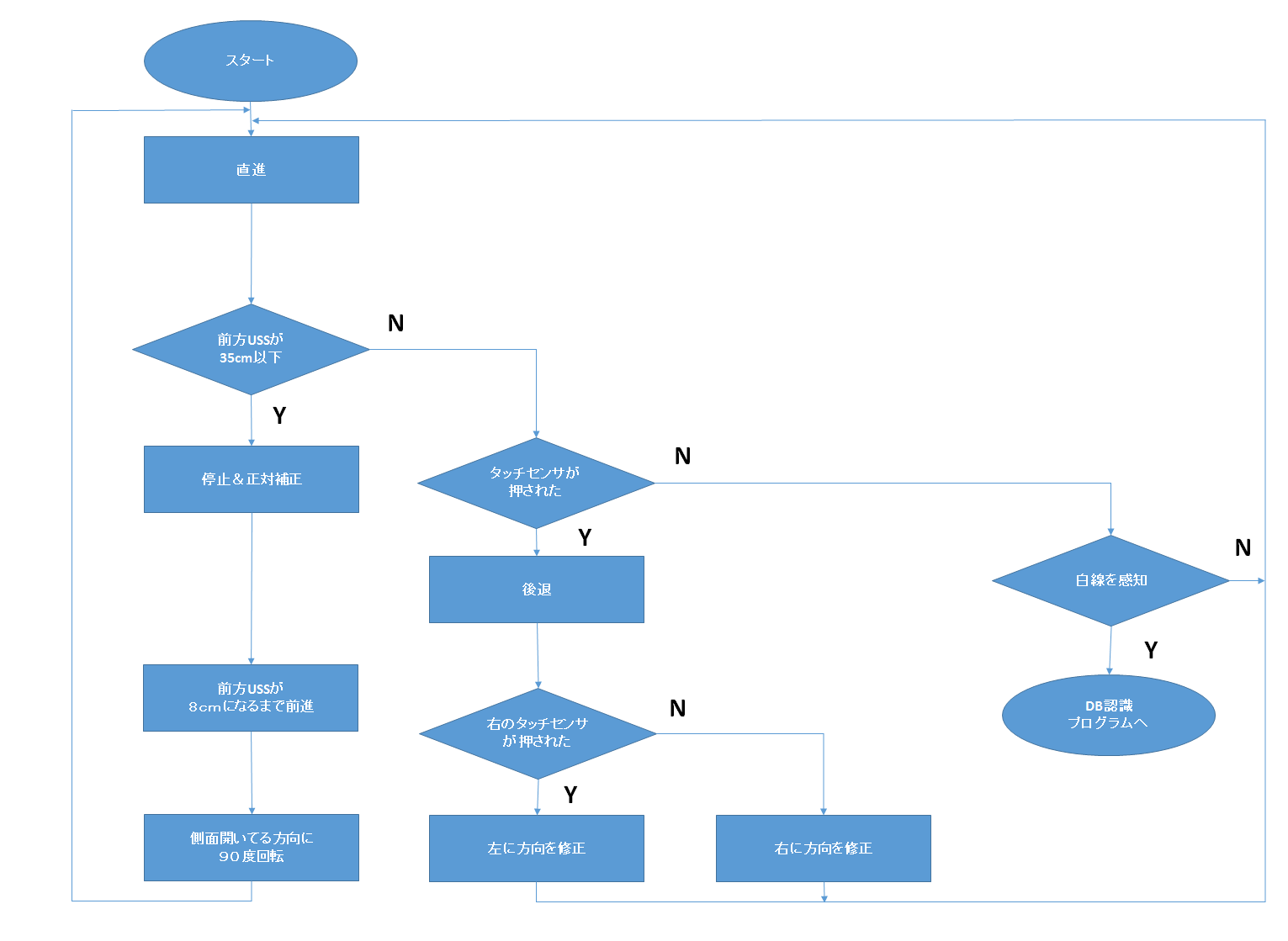
4.1.通路走行
通路を走行していき、白線を感知したらダイレクションボードのプログラムに移行する。
左右の壁にぶつかり、タッチセンサが反応したら向きを補正し、走行を再開する。
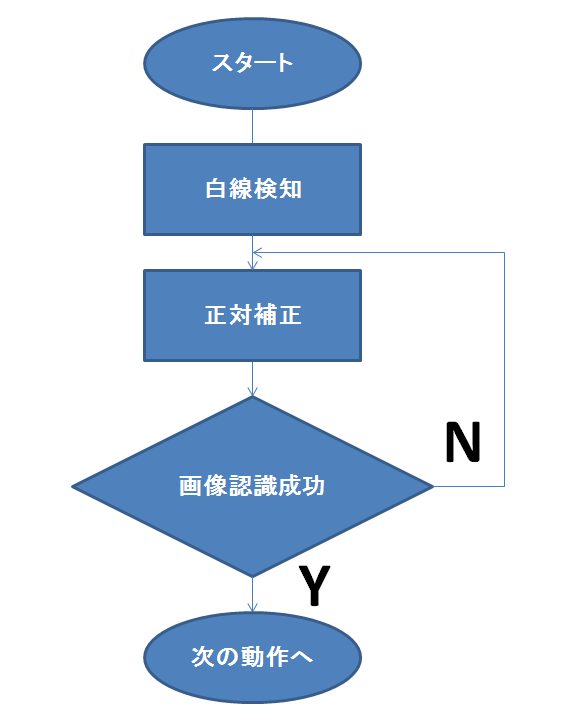
4.2.画像認識
白線を検知したら正対補正を行い画像を取得する。
取得した画像の数字認識が成功するまで正対補正と画像の取得を繰り返す。
4.3.鍵・扉
前方のTSが押されるまで前進する。
TSが押されたら(鍵を押したら)少し後退して、180度回転、前進して扉を通る。

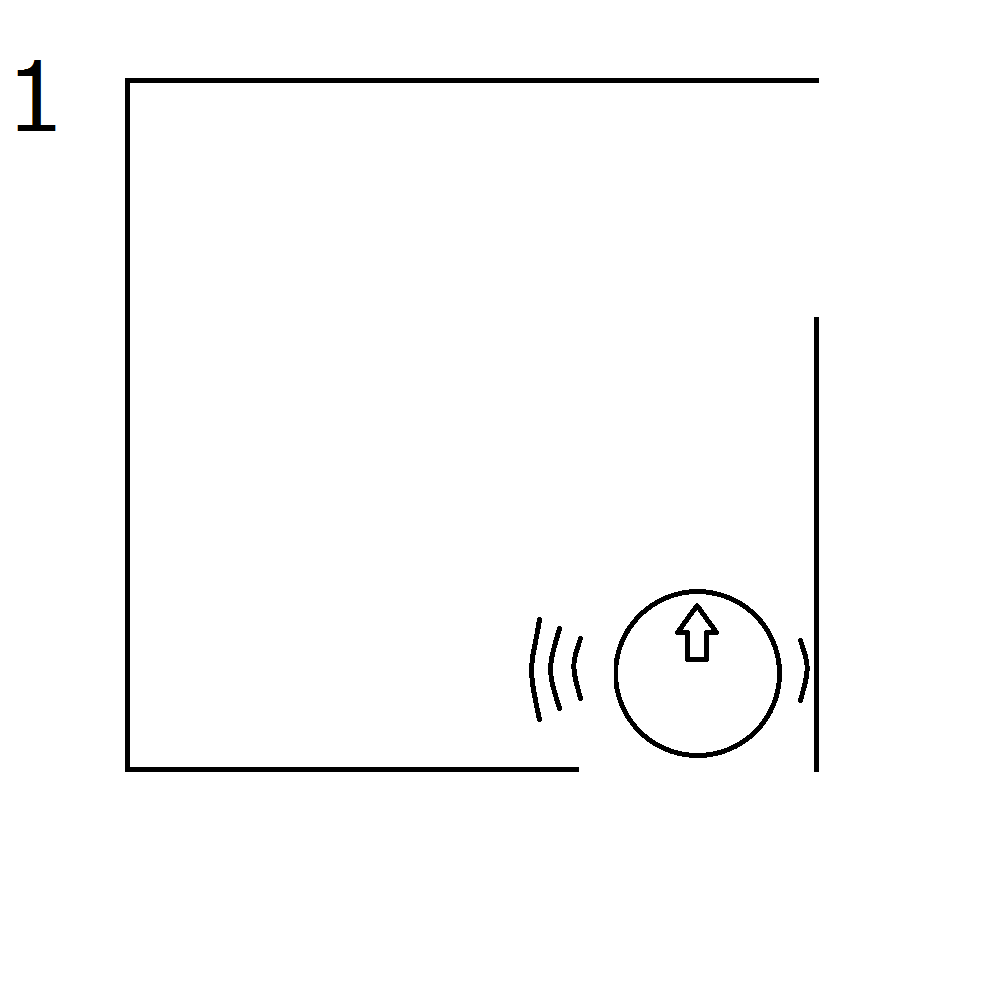
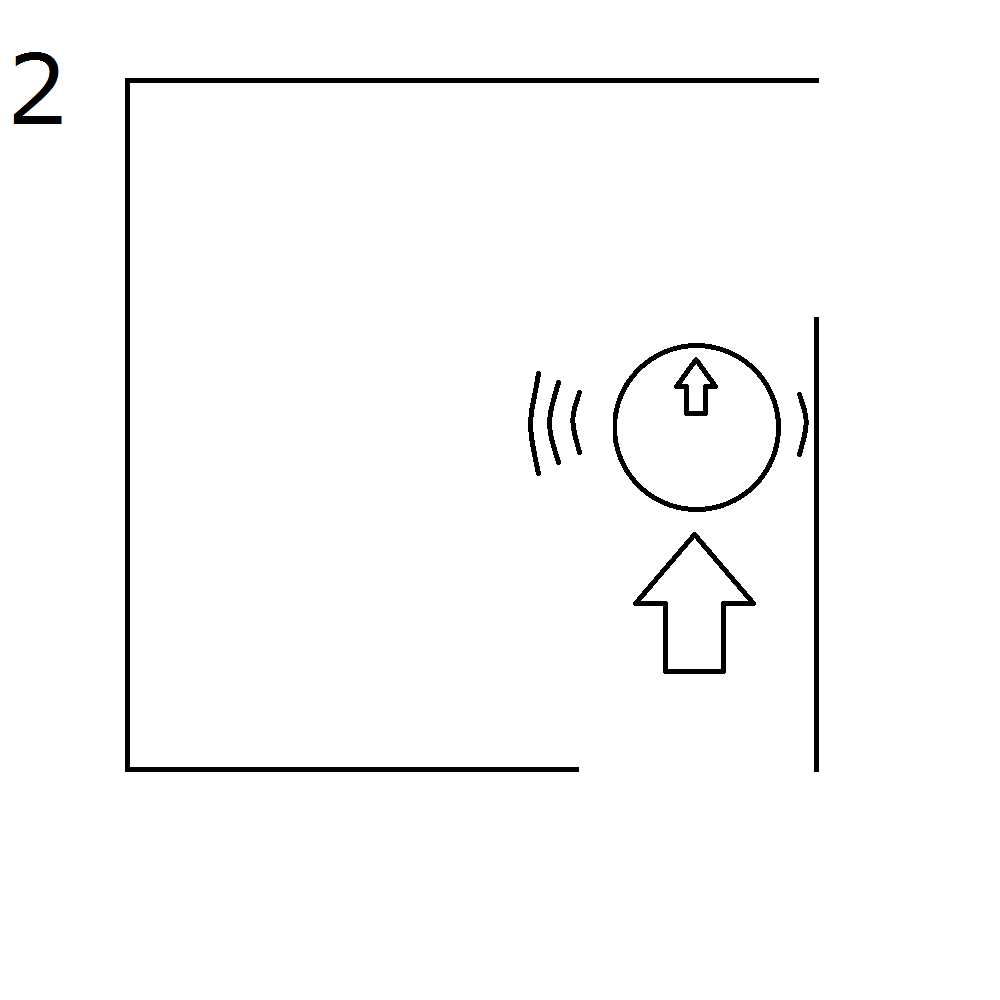
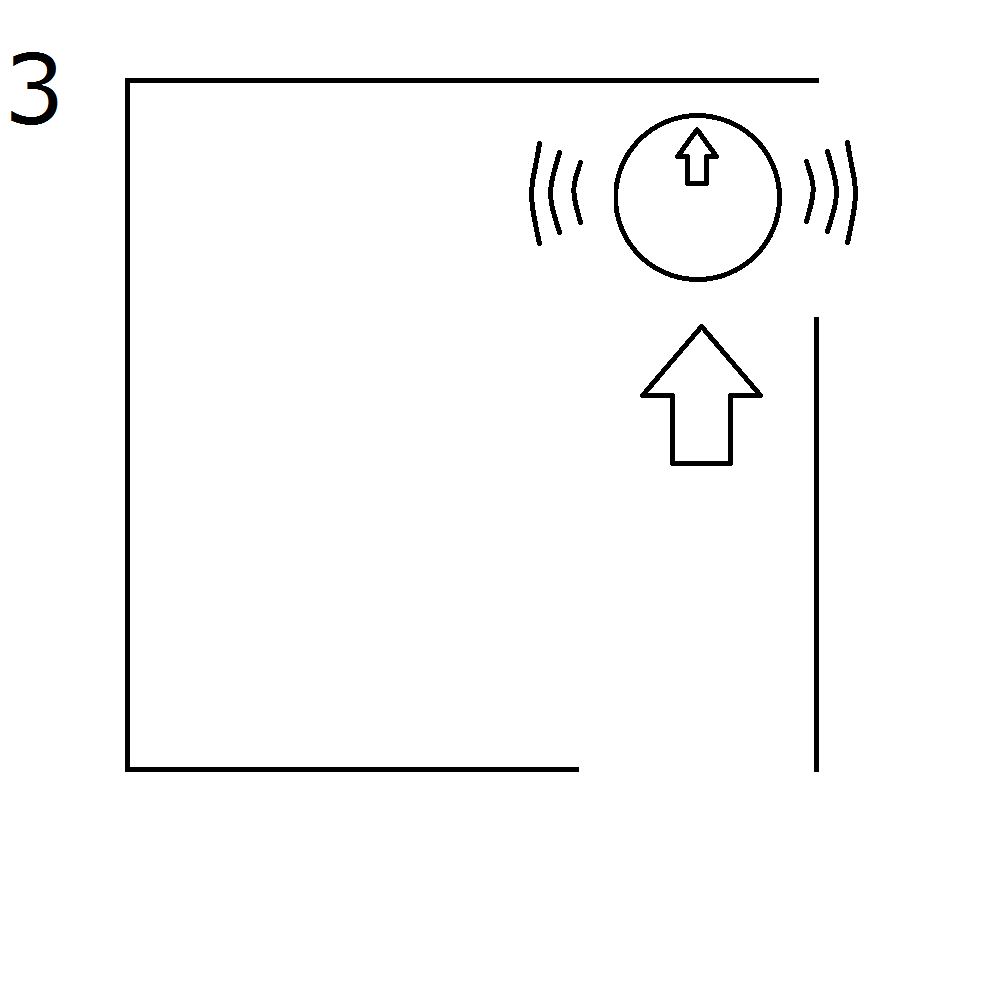
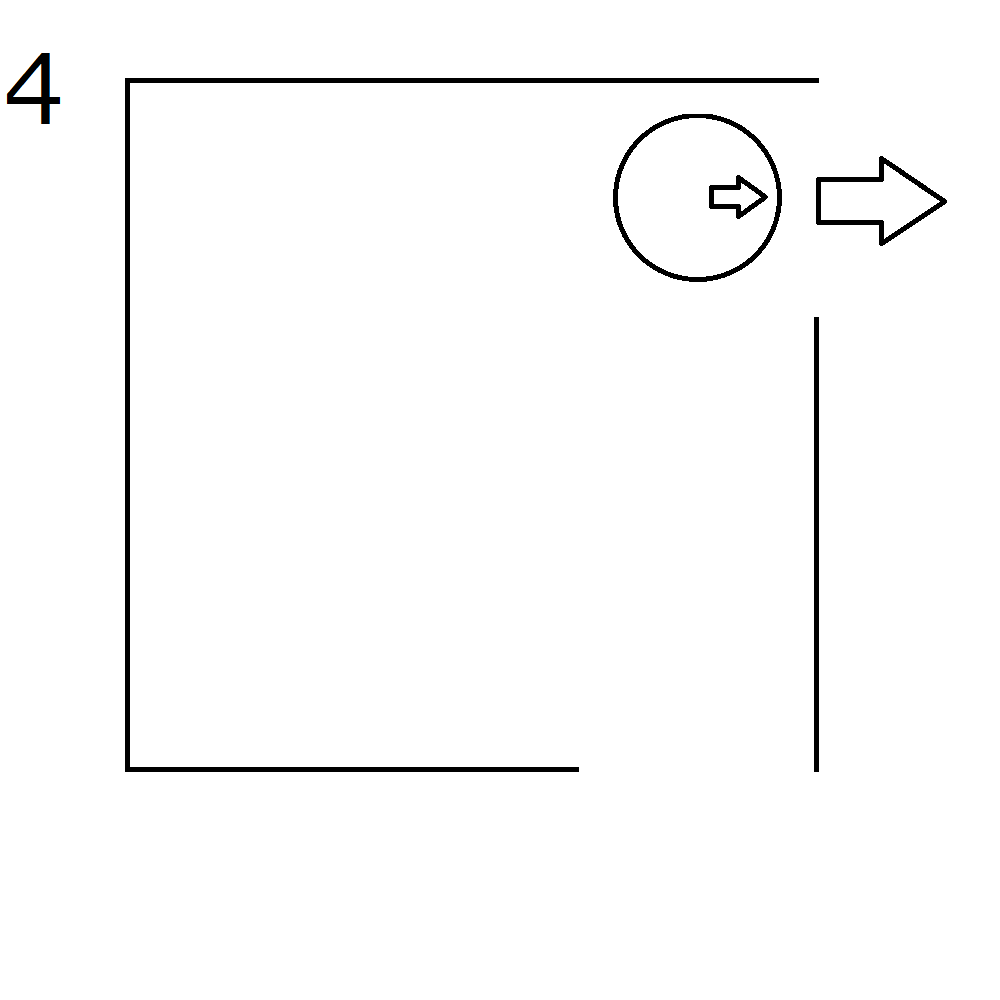
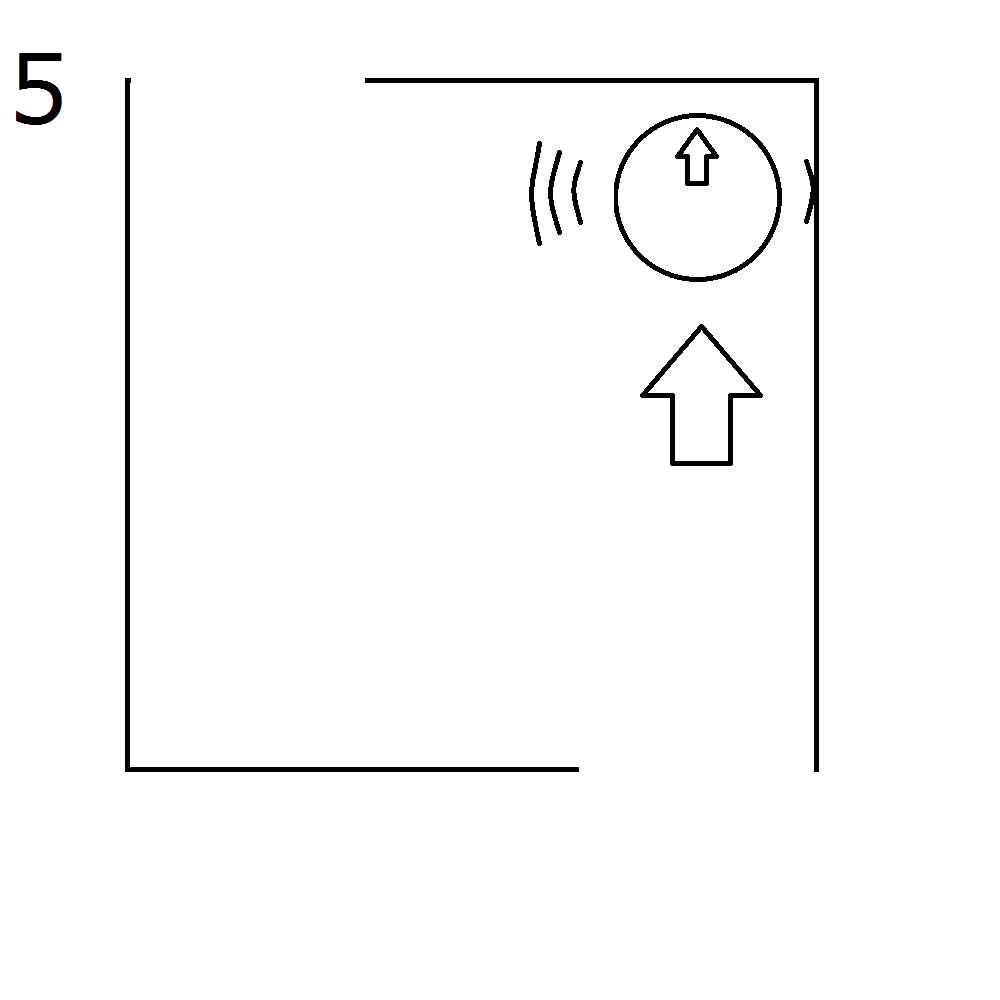
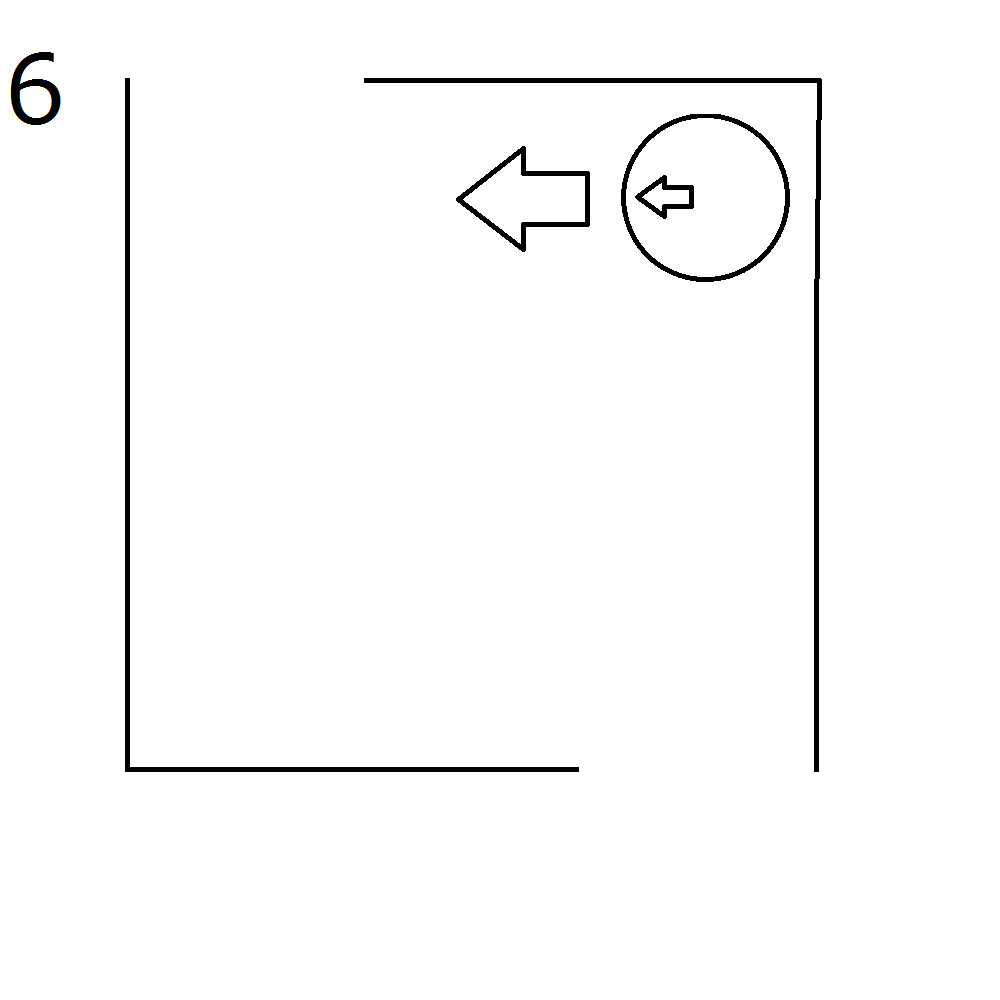
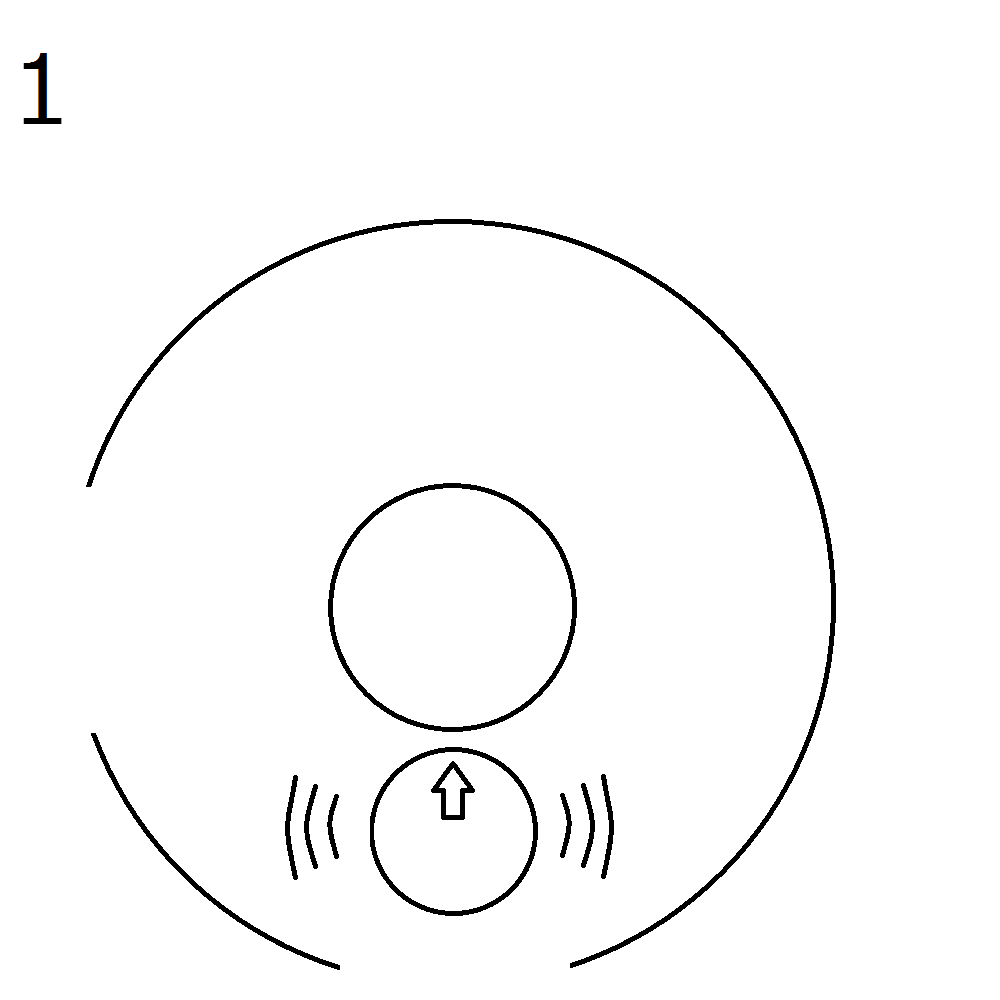
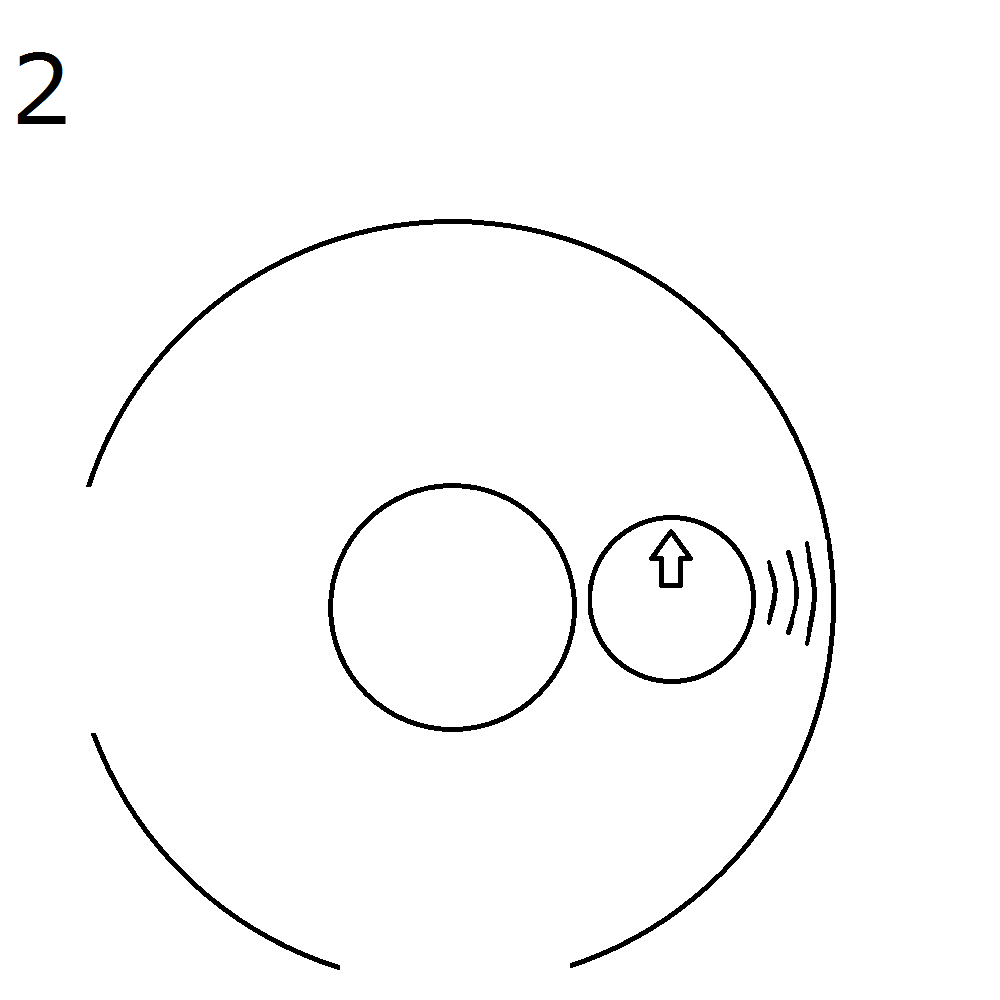
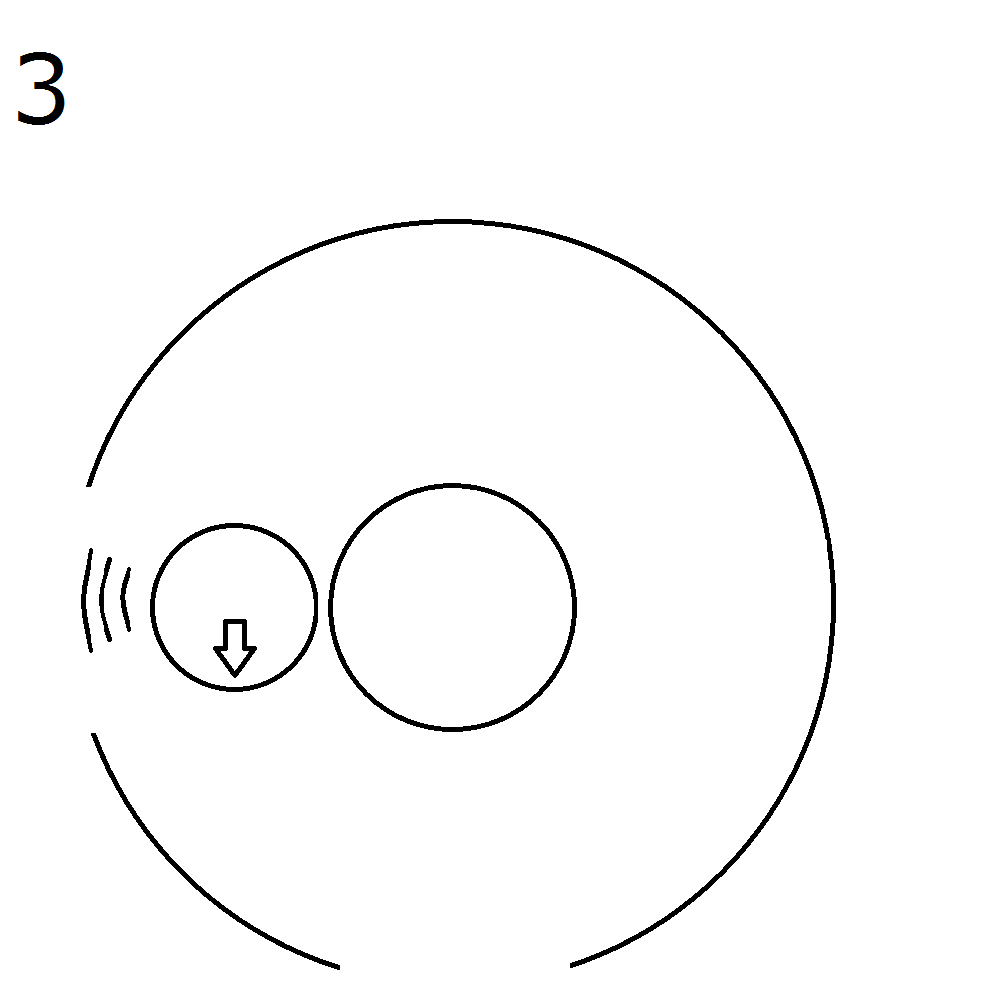
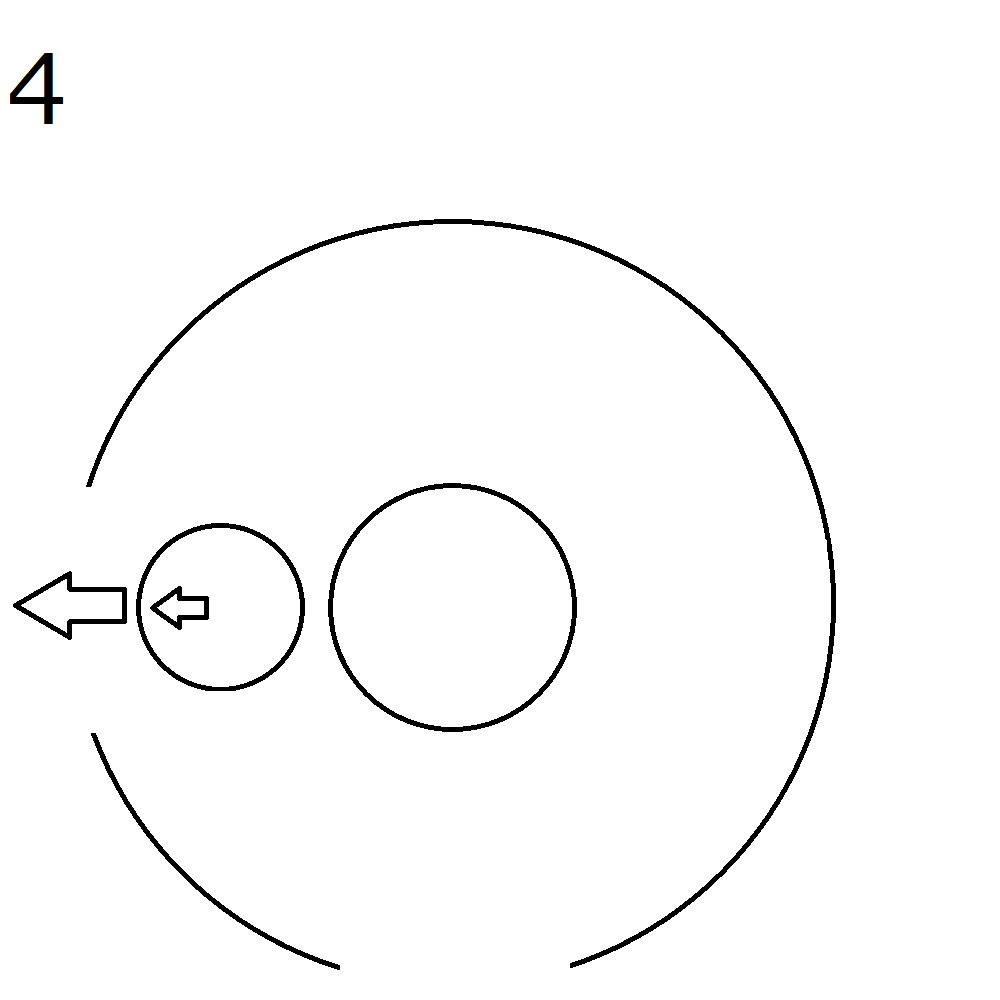
4.4.小部屋
小部屋内の中を1マスずつ、左右USSを確認しながら進んでいく。
出口を発見した場合、そちらに向きを変え、脱出する。
正面の壁まで来ても出口を見つけられなかった場合、90度回転して再び左右USSを確認して出口を探していく。
それでも出口を見つけられなかった場合、入り口の位置まで戻る
以下イメージ図(5,6は3で横が壁だった場合)
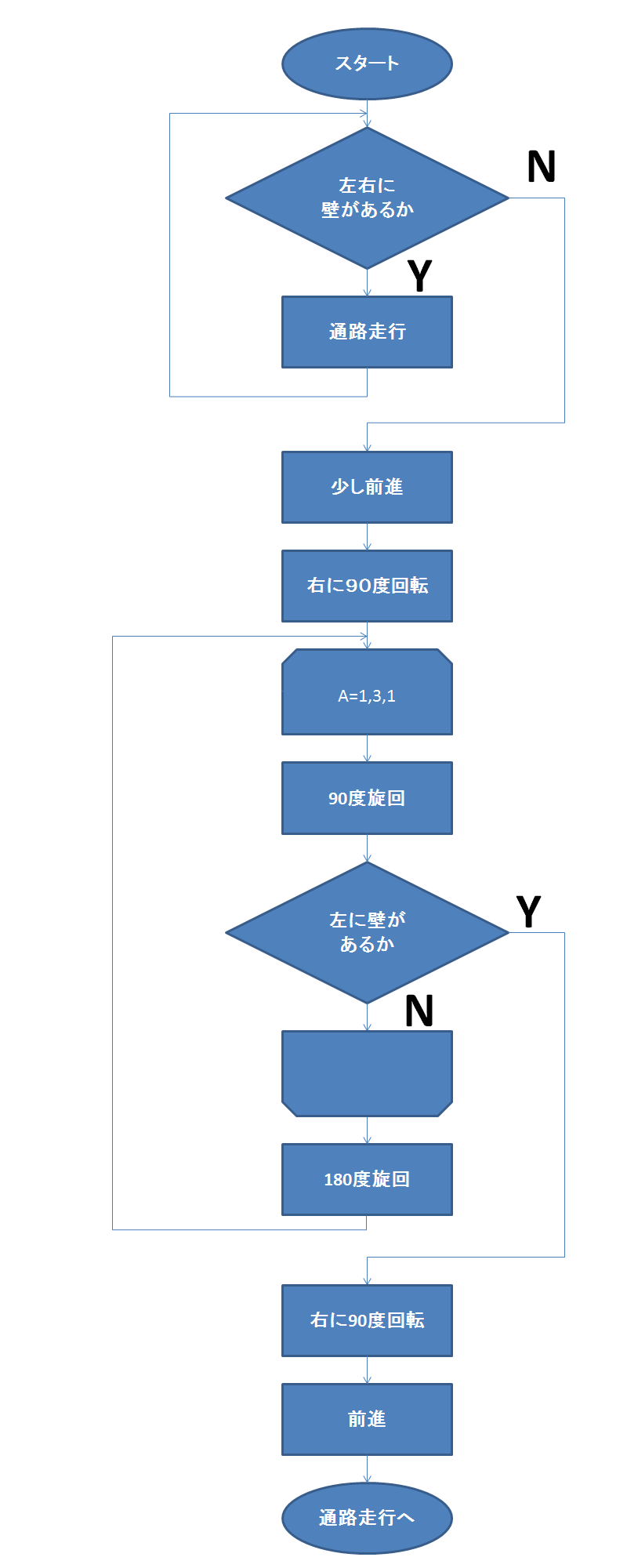
4.5.ロータリー
左右のUSSの値からロータリーに入ったことを確認する。
前方USSの値を使ってMIRSがロータリーの中に完全に入るようにする。
右に90度回転した後、90度の旋回,右USSの確認を3回繰り返し出口を探す。
見つからなければ180度旋回し、出口を探し直す。
MIRS13CPドキュメント管理台帳