fig.2-1
| 名称 | 開発完了報告書 |
|---|---|
| 番号 | MIRS1304-PLAN-0005 |
最終更新日:2013.01.20
| 版数 | 更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2013.02.14 | 小鍋涼太 | 初版 | |
| A02 | 2013.02.21 | 小鍋涼太 | 分類を明示した。 |
本ドキュメントは、MIRS1304のMIRS開発の分析と総括を記したものである。
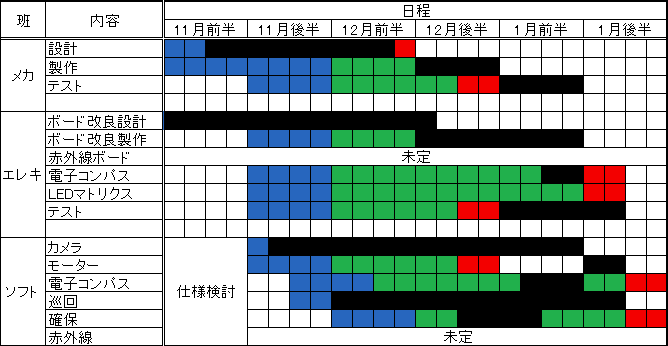
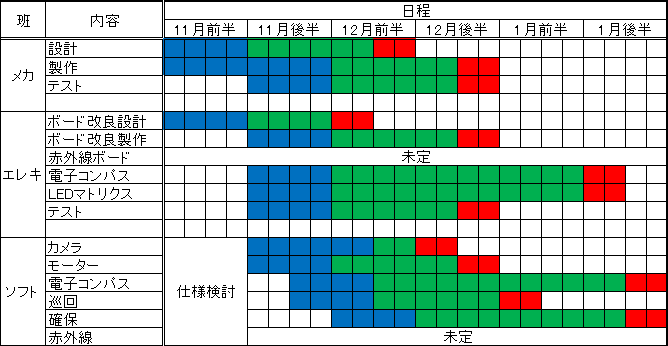
予定と実際の工程を示す。黒く塗りつぶしたところが実際の工程である。
完成するまでに時間がかかりすぎてしまった。ボードとねじ穴の位置が多くあり、また開発中に取り付ける部品が多くなり、設計図から大きく変更することになっていしまった。開発完了後は走行するときにタッチセンサが勝手に反応してしまう、タイヤがコードに絡まるなどの問題があったがスポンジをつけて壁にあったときのみ反応するようにした。コードは結束バンドを使ってきれいに収納した。
もともとMIRS1304には電気回路や電子回路に精通した人がいないのでとても設計や製作には手間がかかってしまった。ようやく手が回せるころには本番まであと1週間になってしまったので、LEDマトリクスの製作をあきらめた。スケジューリング以前に、提案するときに「できるはずである」という直感だけで決めてしまうのはとても危ないとわかった。また、作業を早めにこなすということがあまりできていなかったように思うのでスケジュールを立てたからにはきちんとそれを追いかけることを常に心がけている必要があった。
画像処理が予定よりかなり時間がかかってしまった。これは、予定の見積もりが甘かったことと、処理時間を考えなければならなかったことが原因だと考えられる。このこともあり、走行関数にかける時間が極端に短くなり、本番でほとんど動けないという結果になってしまった。巡回・確保については、モータボードに問題があって動作確認が困難であったが、シーケンス等の確認可能な部分はある程度確認を行ったため、大きな問題はなかった。
| NAME | TOTAL | LECT | SELF |
|---|---|---|---|
| 青島 | 248.5 | 96.0 | 152.5 |
| 芦田 | 210.0 | 107.0 | 103.0 |
| 加藤 | 322.0 | 96.0 | 226.0 |
| 小鍋 | 326.0 | 96.0 | 230.0 |
| 西島 | 189.5 | 96.5 | 93.0 |
| 前田 | 362.0 | 93.0 | 269.0 |
| 渡邉 | 287.5 | 96.0 | 191.5 |
| 合計 | 1945.5 | 680.5 | 1265.0 |
| 平均 | 520.4 | 180.7 | 339.6 |
| NAME | 001 | 002 | 003 | 004-M | 004-E | 004-S | 005-M | 005-E | 005-S | 006-M | 006-E | 006-S | 005 | 006 | 007 | 008 | 009 | 010 | 011 | 012 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 青島 | 7.0 | 16.5 | 3.5 | 5.0 | 48.5 | 9.0 | 16.0 | 10.5 | 9.5 | 16.0 | 21.5 | 3.0 | 83.5 | |||||||
| 芦田 | 55.5 | 9.0 | 6.0 | 3.0 | 13.0 | 5.0 | 12.0 | 30.0 | 3.5 | 44.0 | 29.0 | |||||||||
| 加藤 | 17.5 | 7.5 | 99.5 | 23.5 | 12.0 | 25.5 | 20.0 | 16.0 | 9.5 | 73.0 | ||||||||||
| 小鍋 | 23.5 | 3.0 | 20.5 | 10.5 | 5.0 | 22.5 | 38.0 | 17.5 | 43.5 | 33.5 | 29.0 | 10.0 | 69.5 | |||||||
| 西島 | 45.5 | 7.0 | 10.5 | 30.0 | 17.0 | 30.5 | 3.0 | 24.0 | 3.5 | 5.0 | 13.5 | |||||||||
| 前田 | 7.0 | 24.5 | 20.0 | 14.0 | 53.5 | 5.5 | 9.0 | 60.5 | 20.5 | 53.0 | 3.5 | 7.0 | 28.0 | 56.0 | ||||||
| 渡邉 | 26.5 | 3.0 | 4.0 | 34.5 | 10.0 | 42.0 | 25.5 | 23.5 | 15.5 | 9.0 | 29.0 | 65.0 | ||||||||
| 合計 | 182.5 | 43.5 | 57.0 | 13.5 | 102.5 | 163.5 | 79.0 | 169.5 | 133.0 | 3.0 | 111.5 | 0.0 | 54.0 | 9.5 | 156.0 | 0.0 | 113.0 | 42.0 | 106.0 | 389.5 |
| 平均 | 51.1 | 17.4 | 16.3 | 9.0 | 40.3 | 81.8 | 21.9 | 41.5 | 64.3 | 3.0 | 34.5 | 0.0 | 48.8 | 9.5 | 59.2 | 0.0 | 29.2 | 13.5 | 42.4 | 99.4 |
| NAME | MECH | ELEC | SOFT | COMP | DOCU | OTHER |
|---|---|---|---|---|---|---|
| 青島 | 5.0 | 68.0 | 9.0 | 59.5 | 21.5 | 83.5 |
| 芦田 | 16.0 | 17.0 | 0.0 | 100.5 | 3.5 | 73.0 |
| 加藤 | 23.5 | 32.0 | 125.0 | 25.0 | 16.0 | 73.0 |
| 小鍋 | 5.0 | 60.5 | 48.5 | 103.5 | 29.0 | 69.5 |
| 西島 | 30.5 | 60.5 | 0.0 | 52.5 | 24.0 | 18.5 |
| 前田 | 5.5 | 43.5 | 114.0 | 104.5 | 3.5 | 84.0 |
| 渡邉 | 10.0 | 102.0 | 0.0 | 57.0 | 15.5 | 94.0 |
| 合計 | 95.5 | 383.5 | 296.5 | 502.5 | 113.0 | 495.5 |
| 平均 | 26.6 | 99.9 | 83.4 | 135.1 | 29.2 | 129.6 |
MECH = {004-M,005-M,006-M}
ELEC = {004-E,005-E,006-E}
SOFT = {004-S,005-S,006-S}
COMP = {001,002,003,005,006,007,008}
DOCU = {009}
OTHER= {011,012}
TOTALはすべての作業時間、LECTは授業内、SELFは授業外、MECHからOTHERまでは作業項目の分類。なお、COMPはその他の技術的な作業のことである。
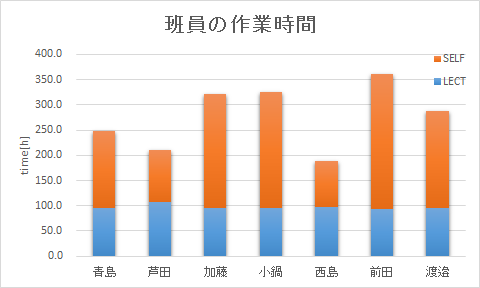
あまりばらつきがないことがわかる。一番は前田362時間である。主にボール検出のプログラムをがんばっていたからだろう。
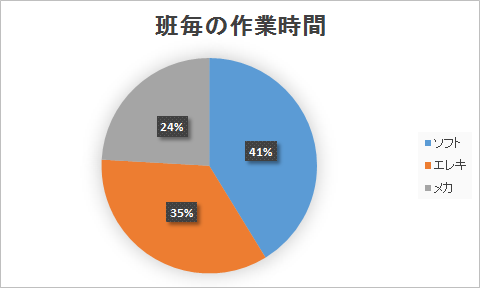
班の一人当たり平均作業時間を円グラフにしたものである。ソフト班がかなり作業をすると聞いていたが、意外とバランスがとれているように思う。
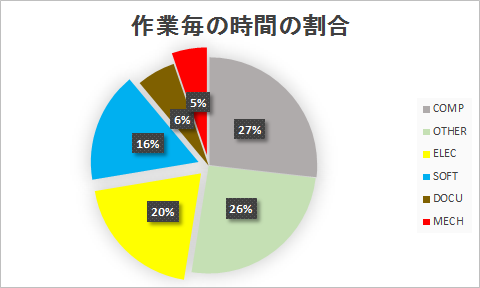
班全員の一人当たりの作業時間割合である。COMPとOTHERが53%と多いのは、おそらく記録をしっかりととっていないことにあると感じた。
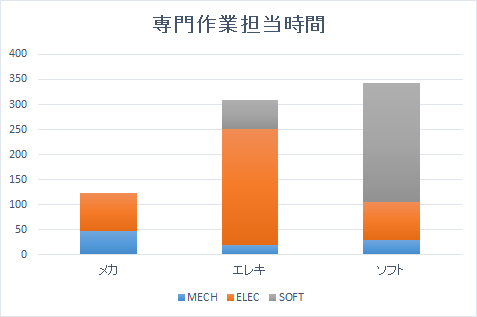
専門作業(ここではworkrecordにM,E,Sとはっきりと記載されているものをいう)の班ごとの総作業時間である。エレキが3人であることに注意する。メカ班がエレキの割合が過半数であるのは、前期の基盤製作や回路デバッグ工程の長さが影響していると考えられる。
競技会の結果は4位-275点であった。
実際に想像していた形状と異なってしまった。設計目標どおり軽量化と小型化はできたが、箱内のコードが予想上に多く整備性は予想よりよくはならなかった。 見た目も豆腐みたいでかっこよくはならなかった。
回路のデバッグにかなりの時間を割かれることになるとは想定済みではあった。原因が基盤にあるのではないかと疑うことが多かったが、実際はケーブルやピンの接触不良によるものがほとんどであった。新しい電子回路を作るということの難しさに直面したがなんとかうまくやった。特に基盤同士のピンの整合をとることがとても大変でした。口頭だけで伝えるのは大変だと感じた。
特に力を入れるところを間違えていたと感じた。画像処理は捨ててでも、直進と回転の精度を上げるべきだった。また、その画像処理も、体育館という環境の問題や処理速度の問題があり、初期の状態からかなり書き換えることとなった。この問題が発覚したのも、MIRS実機での実行が遅れてしまったことが原因だと考えられる。
MIRS1304は標準機と結構異なる実機を作成することを決定した。そのため、作成する時間や、修正する時間が相当かかってしまった。一部実装することができなくなってしまったものもあったが、無事MIRS実機を完成し競技に出場することができた。最下位という結果になってしまって悔しいけれども、一つのことを協力して終わらせることができてよかった。この一年間のプロジェクトは無駄ではなかったと実感した。
|
私はMIRS1304のメンバーとしてMIRS競技会に向けて仲間と一緒にMIRS本体の開発に携わってきました。この1年は困難の連続でした。夏休みに行われたプレ競技会では他の班のMIRSはちゃんとした動作をしている中で私たちの班はまともに前に進むことができませんでした。夏休みが明け後期が始まる頃に動けるようになったものの、それでも動きがとてもぎこちなかったのを覚えています。 そこから、MIRS競技会までになんとかして他の班に追いつこうと必死に開発にいそしんできました。私はエレキ班としてモータコントロールボードの製作を担当しました。材料が届いたのが冬休み直前だったのと、回路の設計ミスから半田付けの作業に入ったのが冬休み明けでした。モータコントロールボード2枚分ということもあり、作業を終えるのにとても時間がかかってしまいました。作業を終えて、MIRS本体とつなぎモーターのテストを行いました。モーターは動きませんでした。原因は最後まで分からず時間もなかったので、元々、動作がしっかりできた過去のモータコントロールボードを使うことになりました。 MIRS競技会本番では、ちゃんと動作し、全部の班で唯一、小部屋のチェックポイントで得点することができました。しかし、競技1順目からのリタイアが大きく最下位になってしまいました。これはMIRS本体の動作試験に時間があまり裂けなかったことが大きな原因だと感じました。システム基本設計書の開発スケジュールでは計画がしっかりできていたのにもかかわらず、それを実行できなかったことはとても残念でした。さらに、私にいたってはモータコントロールボードの製作という仕事を完遂することができず、チームの足を引っ張ってしまいました。私にとってこれはとても心残りで後悔しています。なぜ、もっとちゃんとしたボードを作ることができなかったのか、どうして開発スケジュール通りに作業できなかったのか、チームのみんなに申し訳ない気持ちでいっぱいです。 おそらく、今、私のなかにある後悔の念は一生消えることはないでしょう。私の1年を通したMIRSは失敗ばかりでうまくいったものなど1つもなく、何1つとして満足のいくようなことは1度もありませんでした。しかし、このチームで1年間やってこれたという事実はこれからの人生できっと大きな意味をもってくると思います。この電子機械設計製作、通称MIRSは苦悩や困難を押し付けてくる最悪な授業であるのと同時に、MIRS1304のみんなと一緒に作業してきたというかけがえのない記憶を残してくれた最高の授業でした。 最後にMIRS1304のみんなへ「1年間ありがとうございました。」 |
|---|
|
自分の担当はメカトロニクスと、超音波センサーの作成でした。超音波センサーの作成では、半田付けがうまくいかず、また、作成が終わってもなかなかうまく動かず、正確に動くようになるまでかなりの時間と苦労をかけてしまいました。 その後はメカトロニクスの作成を行いました。メカトロニクスでの目標は、MIRSAK本体の小型化と軽量化でした。そのために設計を0からすることになり、今までのMIRSAKの設計を参考にすることができず、無駄なスペースを作らずにシャーシの大きさやボード、バッテリーなどの搭載位置を考えることが難しかったです。試行錯誤しながら目の前にあるものを改良していくことはできないので、できるだけ実際に作った後のことを想像しながらつくるのは大変でした。しかし、それでも実際に作成してみると多くの問題があり、設計どおり進むことができませんでした。何とか形にすることはできましたが、自分の設計ではスペースが小さすぎ、バッテリーを載せる時にモータの配線に多くの負荷をかけてしまったり、ボードとボードの間のクリアランスが少なすぎてショートしてしまったり、コードの長さがぎりぎりでボードや配線に負荷をかけてしまったりと、かなりのエラーを起こさせてしまったと思います。実際に自分の班では他の班と比べて多くのIOエラーが起こっており、このほとんどが自分の設計ミスが原因で起こっており、反省しています。IOエラーの改善に多くの時間をかけてしまい、プログラム班のプログラム作成の時間を大幅に減らしてしまい、また、MIRSAK本体の信頼性が低く、少しの衝撃でIOエラーが起きてしまったり、同じことが繰り返しできなかったり、ボードやCPUを殺してしまいました。 また、原因不明でMIRSAK本体が動かず、ボードやソフトの間違いを探しているときも、自分はソフトもボードも知識が足りず、力になれないことが多くありました。しかしそれでも、できるだけ遅い時間まで残るようにし、自分から仕事を探すように心がけました。 このMIRSAKという授業では、自分から仕事を探すことが一番大事だと思います。自分は能力が少なく、できる仕事は少ないですがそれでも雑用や競技会の準備の手伝いをすることで、少しでもMIRSAKの活動に貢献できるように心がけました。 このMIRSAKでの経験は、なかなかできることはできないと思います。この経験を大切にして、就職後の活動に生かしていきたいと思います。 |
|---|
|
電子機械設計製作が始まりMIRS1304の私含めたメンバー計7人(他:青島良、芦田樹、小鍋涼太、西島侑作、前田球太、渡邊智郎)、レビュア教員の牛丸先生と、一緒に一年間活動することになりました。 MIRS実機解体のときみんなで協力してスムーズに解体し、足りない部品の特定も早く終わりました。ボード作成のときもみんなが担当のボードをしっかり作り、試験を個々にやってくれました。ここまでみんなそれぞれの仕事をしっかりとやってくれる班は見ていた限り少ないと思います。体験入学のデモ競技準備のために、MIRSを完成させることに全員で頑張っていましたが、モーター制御ボードの不具合を直すのに時間がかかりすぎてしまい、競技に出すことはできたものの良い結果に終わることができなかったので悲しかったです。 後期のオリジナルマシン提案の際なかなか意見がまとまらず、最終的に「MIRS実機の形状を変えたい」というみんなの意思で、できるかどうか不安のまま決定しました。また、ボード類もIOエラーを起こしにくくするためにいろいろなボードの統一化、カメラの解像度をあげることによって怪盗機捕獲の精度向上をすることに決定しました。オリジナルマシンのキャッチフレーズを「Dream Box」に決定したとき、みんなやる気に満ち溢れていました。 オリジナルマシン完成までの道のりは長く、辛かったけれども競技会には間に合いソフトの完成に時間を費やすことが可能となりました。完成後もコンパクトフラッシュのデータが破損してしまい、MIRS13CPに代用品を借りることもありました。競技会に近いときもコンパスを用いた走行制御がうまくいかず、多大な時間を浪費したこともありました。 競技会前の練習で試してみたところ一度目で綺麗に動いてくれたので、結構良い結果を残せるのではないかと思いました。しかし、競技会では良い動きをせずMIRSは予想とは違う動きを見せてきました。少し前までうまくいっていた実機がここまで急変するとは思っていなかったので、ものすごく驚き、悲しかったです。 最下位という結果になってしまいましたが、この一年間は決して無駄ではなかったと私は思います。私はみんなで協力しひとつのことを完全とは言えずとも達成することができるということが重要だと思います。また、そのグループのなかでマネージャという役割をやれてよかったと思いました。 みんなとMIRS1304というプロジェクトを一緒に一年間できてよかったです。一年間ありがとうございました。 |
|---|
|
MIRSを通して学んだことは3つあります。 1つ目は工学を学ぶ意義とその姿勢です。MIRSをやるまでは、電子回路など何のために役に立つのかわかりませんでした。工学というのは何かに使うためにあるものだとはまったく考えていなかったからです。こうして4年生になっていざMIRSに取り組むと、成績はまったく問題がなかったはずなのに、理解が班員に追いつかない状態が続きました。他のクラスメートを見ていると、スムーズに作業していると感じていました。やりたいことに対して何が必要なのかがわかるように勉強していて、いざそのときがきたら、今まで勉強していたことを生かして必要な情報だけをピックアップできるようになるのだと思いました。5年生の卒研でもこのように基礎はすぐに終わらせてたくさんの情報を仕入れる勉強方法を導入したいと考えています。 2つ目はグループワークの大変さです。当然グループの能力は異なるので、誰がなにをやるべきかを考えるのがとても大変でした。自分では他人に対してこれくらいわかるだろうと思っていても、案外わかっていないことが多いことがありました。これから就職して会社のプロジェクトに組み込まれたときに、相手の能力に応じてどのように作業を分担するかを第一に考えていきたいです。 3つ目はやらなければいけないことに対する処理手段です。僕は今までやらなければいけないことは、やりたいことと並行して行っていました。その方がストレスにならないと感じていたからです。しかし、MIRS終盤になるときにMIRSに参加しないといけないような雰囲気になっていたし、自分も貢献していきたいと思っていたので積極的に参加しました。実際にそのような状況になってみると、MIRSが終わってからの時間がとても有意義に過ごせるようになりました。1日のうちにやりきるという小さな達成によって不安が消されるのだと思います。 このようにMIRSは私にとってマイナスだった要素を打ち消すものになりました。高原のように得意なものに対してどんどん磨きをかけていくようなことはできませんでしたが、これでよかったと本当に思っています。また、MIRSがなかなかうまくできないことに不満を抱いていましたが、今となっては失敗を経験できるいい機会になったと感じています。また、基礎的な設計手法や設計工程を少なからず体験することができました。これを会社に勤めたときの意見を出すときの参考にしたいと考えています。 最後に、MIRS1304に組まれた私はとても幸せ者だと思います。MIRS1304は他の班に比べて「みんなでやる」という気持ちがとても強かったのではないかと思います。みんなでやることの楽しさを改めて実感することができました。進学してもこの経験は絶対に生かし、技術者として、人間として強靭な忍耐力と俊敏な判断力、何にも負けない強い心を持てるようにがんばりたいです。 |
|---|
|
前期は標準機の組み立てを行いました。他のメンバーが放課後残ってやっているなかで、自分はあまり協力的でなく作業もあまりしていませんでした。一日体験入学や高専祭は自分の与えられた仕事には積極的にすることができました。 後期では、前期で協力的にできなかったのでそれを反省し積極的に参加するようにしました。自分たちの班は軽量化、整備性の向上や斬新な構造を目標にミルスを設計しました。構造を新しく設計することにし、最初から図面を作りました。設計が終わり製造を開始してみると穴の位置が微妙にずれ、超音波センサの位置が他のところに干渉してしまうなど設計段階ではわからないミスや加工などが難しく思うように進まず、完成するのが遅れてしまいました。実際に動かしてみてもタイヤにコードやナットがあたる、タッチセンサが関係ないところで動作してしまうなど、ミスが多く修復するのにも時間がかかってしまいました。機体が完成した後はエレキの手伝いをいていました。回路などはわからないことが多かったですがコードは上手に作れるようになりました。動作試験をしている最中もエラーがでてしまいなかなか試験を進めることができませんでした。満足に試験をしていない状態で本番になってしまい、よい結果が得られませんでした。よい結果は得られなかったですが後期は前期に比べると試験や製造しているときは班員とコミュニケーションをとりながら、班でまとまった作業ができたと思います。自分は、ものを形にする大変さと期限以内に設計しないと後の人に迷惑をかけてしまうということを実感することができました。 競技会が終わった後では、自分の作業内容などを思い出してみると改善できる点が多くあり悔しい思いもありました。その分、忍耐力がつきみんなで作業をすることの楽しさを知ることができました。この経験は大切にしていきたいです。 一年間を通して、今までは説明書のあるものを組み立てることしかしていませんでしたが、材料や構造などを考えたのは今回が初めてでした。ソフト、エレキ、メカに分かれて分担作業をするのも初めてでそれぞれのコミュニケーションがとても大切であることを実感しました。また、期限内に収めることの大切さが身にしみました。期限内に完成しなかったのもうまく動作しなかった原因だと思います。社会に出た後や今後の学校生活でも、この経験を生かして期限内には確実に収めるようにしていきます。 |
|---|
|
電子制御工学科のメインイベントとも言えるMIRSをついに今年度行いました。先輩方の競技を見てきて、大変なことは承知していましたが、やはり思った通りには動かないと分かりました。1年間を通して、多々こうしておけば良かったと思うところがあります。一番後悔しているのは、画像処理に時間をかけすぎて、電子コンパスを用いた走行関数の作成に時間をかけられなかったことです。夏の体験入学のときから、モータボードに問題があり、ソフトのデバッグよりもエレキのデバッグにかなり時間がかかっていました。MIRS競技会でその経験を活かせず、モータボードのデバッグに時間がかかってしまい、結局CPの機体からモータボード等を借りることになりました。この決断をしたのも当日まで一週間をきっていて、時間ぎりぎりでした。走行制御がしっかりしていれば、巡回が成功し、もっとポイントが入ったと思うので、非常に悔しいです。 画像処理の開発をしていて最も重要だと思ったことは、精度ではなく処理時間です。現在のPCのCPUならば問題ありませんが、MIRSのCPUで処理させると、最低でもPCの10倍はかかります。当初の予想以上に遅かったため、初期に考えていた処理をかなりオミットしました。できる限り高速化したつもりですが、まだまだ早くすることはできると思うので、そこは後輩たちに任せたいと思います。また、後輩たちに伝えておきたいことが三つあります。一つ目は、画像処理では配列関係のエラーがよく発生するので、コンパイルが通っても油断しないということ。二つ目は、ハフ変換はMIRSでは絶対に使用しないほうが良いということ。三つ目は、新しく別のプロジェクトを作ってとりあえずコードを作ることは悪くないですが、一度MIRSの方で実行した方が良いということです。 同じソフト班の加藤君は巡回と追跡の両方を担当していて、非常に負担が大きく、画像処理は後にして先にそちらの方を手伝うべきだったと思っています。非常に迷惑かけて申し訳ありませんでした。 競技会は残念な結果となってしまい、画像処理の出番はありませんでしたが、個人的にはインターンシップで学んだプログラミングの技術を活かすことができたと思います。MIRSをやって、夜遅くまで作業したことや他の人と共同で作業したことは、企業に行っても通用することではないかと思っています。この経験を無駄にせず、企業に行ったときに活かしたいと思います。班員の皆さん、一年間本当にありがとうございました。 |
|---|
|
この一年を振り返るともっと頑張ればよかったと思った。今まで3回先輩方のMIRSを見てきてなぜ動かないのだろうと不思議に思っていたが、ここまで動かないものだとは思わなかった。先生たちがよく、すごい授業というだけのことはあると思った。今まで座学で学んだことを形にしたり、習ったこともないことを自分たちで取り入れたりとても楽しかった。 自分はエレキ斑ということでI/Oエラー0と基盤のコンパクト化を目標に掲げたが結局競技会でI/Oエラーを起こしてしまった。それがなければもう少しMIRSも前進できた思う。特に前期はただ言われたことを理解せずにやっていて自分のためにも班のためにもならなかった。そのせいもあって新型の機体を走らせるまでに非常に時間がかかってしまいソフト班には迷惑をかけたと思う。 今のところあまりいい面を言えていないが、収穫も多かったと思う。まず、今まで知らなかったみんなの一面を見ることができた。主に変わった一面だったが班員については今までの5倍くらい知ることができたと思う。普段だとどうしてもある程度固定した人との会話ばかりなので非常にいい機会だった。 また、回路図からどのような働きをするかもわかるようになったと…思う。自分で先輩方が改良したDBをさらに改良したので新型MIRSが動かなくなったとき自分のボードのせいかとヒヤヒヤして回路図を何度も何度も見直したりしたおかげだと思う。 また、計画の大切さと計画は予定通り行かないことを学んだ。具体的に期限を決めればやらないといけないという焦りに駆られ頑張れるし(間違った方法かもしれないが)やるべきことが明確に見えてくると感じた。ただ、その計画というのは納期などから逆算するものなのだろうが計画に抜けがあると大変なことになってしまう。というよりも、今回がそれだった。各基盤の完成からそれが正しく使えるか調査するまでの時間を全く考えていなかった。そのため新型MIRSの動作チェックに思っていたより時間をとることができず先ほど書いたとおりソフト班に迷惑をかけてしまった。 最後のほうは例年の方々通り追い込みを頑張ったがそれはそれでいい経験だったと思いつつ余裕を持つことも大切だと痛感した。 今年は前期でみんなが基本的な動きをできるようになった影響からか競技の難易度が上がり、なかなか各班が苦戦したがいろいろな点で成長することができたと思う。これを糧に各々が進路に向けて集中していっていい形で5年間を終えたい! |
|---|