最終更新日:2013.10.4
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2013.9.30 | 泉谷,川上,瀬戸 | 初版 | |
| A02 | 2013.10.4 | 泉谷 | 大沼 | 画像認識での「優先度」、小部屋について追記 |
目次
- 本ドキュメントは、標準機を使用した迷路攻略に関するソフトウェア中心の開発計画書である。
1.はじめに
-
- 標準プログラムを流用してプログラミングを行う
- ロータリーと鍵は避けて、確実にゴールを目指す
2.基本戦略
- プログラム全体のフローチャートを以下に示す。
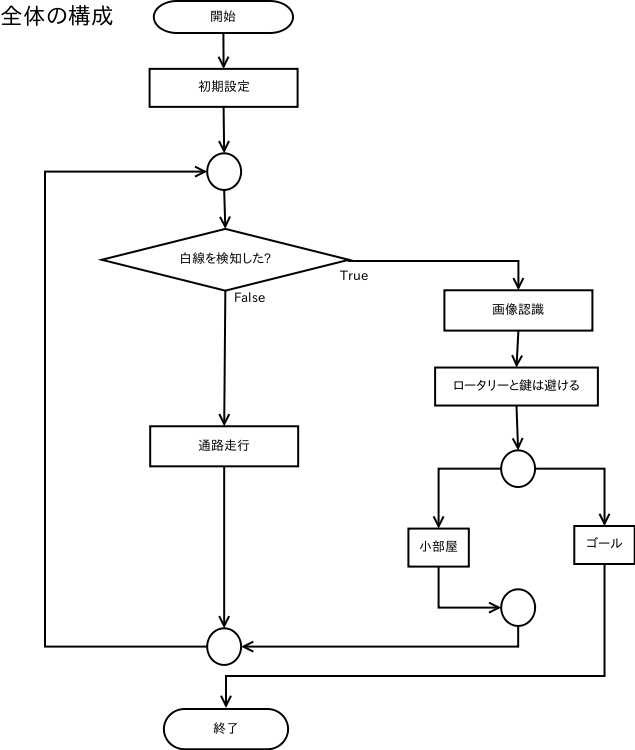
3.動作の流れ
- プログラムの詳細を示す。
4.1 通路走行
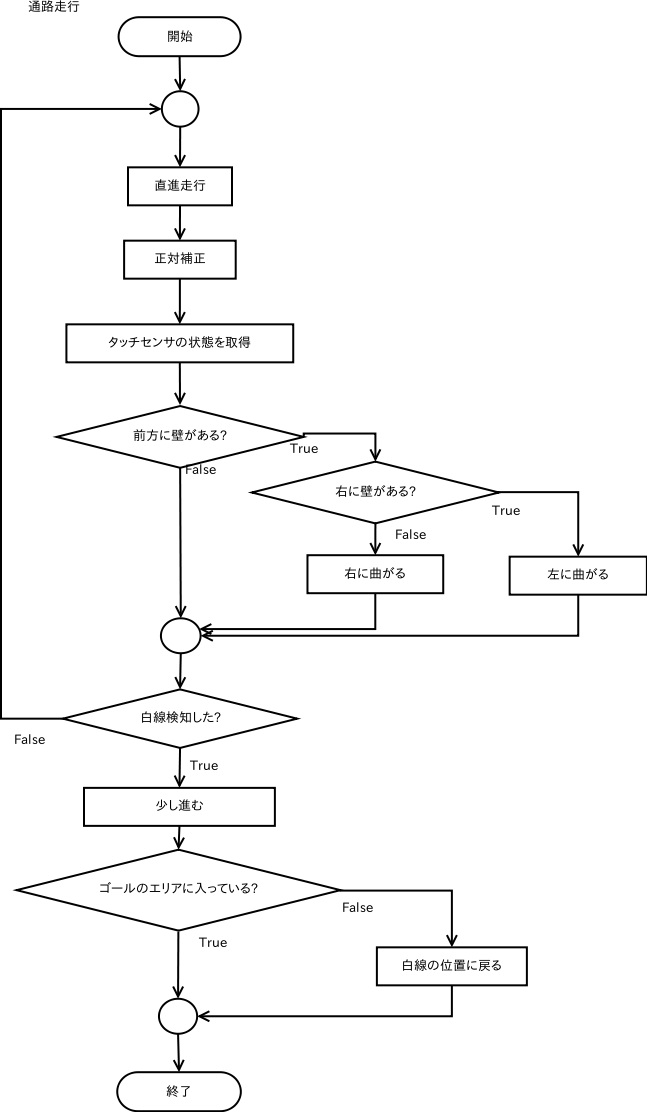
通路走行は、目標距離になるまで直進を繰り返し、目標距離に達したら停止するプログラムである。
4.2 数字認識
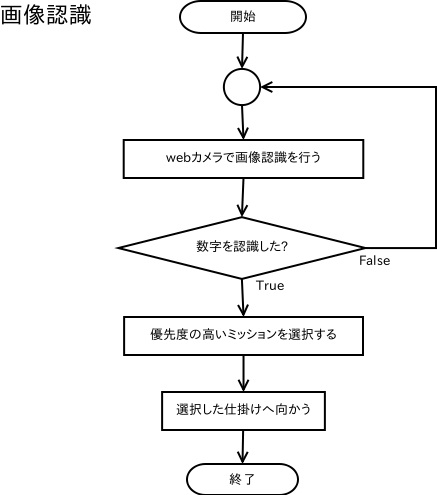
数字認識については、標準プログラム内の数字認識プログラムを利用する。
優先度については、DBの数字認識と条件分岐によって、鍵とロータリーのDB番号を認識したら鍵とロータリーでないミッションを選択すようにプログラムを作成する。
もしも一方が鍵でもう一方がロータリーの場合は鍵を優先するようにプログラムを作成する。4.3 ロータリー
ロータリーは攻略が難しいため、DBの画像認識によりロータリーを避けるようにプログラムを作成する。4.3 小部屋
小部屋を攻略するプログラムのフローチャートを以下に示す。
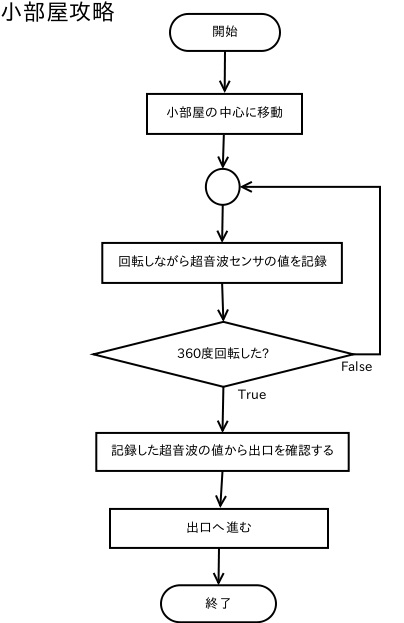
超音波センサを使って部屋の中心に移動し、少しずつ回転しながら超音波センサの値を記録を行う。
出口のある場所では超音波センサの値は大きい値は9999になるので(MIRS1302 標準ボード試験報告書より)、その場所に向かい小部屋から出る。
4.4 鍵・扉
鍵・扉は時間短縮とリスク軽減のため、DBの画像認識により鍵・扉を避けるようにプログラムを作成する。
4.詳細設計
5.開発スケジュール
| 8/7 | 8/8 | 8/9 | 8/10 | |
|---|---|---|---|---|
| ソフト | 開発 | 開発 テスト |
統合 | 最終調整 |
| メカ・エレキ | 機体修正 | |||
沼津工業高等専門学校 電子制御工学科