はじめに
本ドキュメントは、新競技攻略のためのMIRS1301オリジナル機体の基本設計書である。
システム提案書をふまえて
MIRS1301システム提案書で掲げたチームコンセプト
「唯我独尊 もう、憧れるのはやめた」
には、先人を乗り越えてMIRSの歴史に残るチームになろうという意志を込めている。
また技術アピールポイント「通信革命」は、
基板間通信の方式変更・統一による拡張性向上によって
来年度以降のMIRS開発に革命を起こすことを意味している。
ここでシステム提案書に書かれた内容を簡潔にまとめると、
MIRS1301オリジナル機体に要求される要素はつぎの3つに分類できる。
- 競技攻略のための巡回・追跡機能
- 仕様変更や故障に備えた拡張性・整備性の向上
- 競技会当日に来場者を盛り上げるエンターテイメント性の向上
このうち今回の開発で最も意識する必要があるものを選ぶとするなら、チームコンセプトおよび技術アピールポイントの方向性から2つ目の「拡張性・整備性の向上」である。
したがってMIRS1301は上記3つの要素を基本として
来年度以降を見据えた拡張性と整備性およびシステム全体の流用性を念頭において開発を行なっていく。
システム要件と実現方法概略
MIRS1301に具体的に要求する機能とその実現方法を以下に示す。
| 機能 | 目的 | 要求 | 実現方法 |
|---|---|---|---|
| 自己位置推定 | 巡回 | 50[cm]四方のマスで構成された競技会コースにおいて、 地図データをもとに目的のマスまで移動できるようにする。 (誤差10[cm]以内が望ましい) | ロータリーエンコーダによる自己位置推定を基本として、 方位センサー・超音波センサー・タッチセンサーを用いて補正する。 壁と怪盗機を識別するために両側面にカメラを搭載する。 |
| カメラによる怪盗機および宝の認識 | 追跡・巡回 | 移動中の怪盗機を距離300[cm]以内で撮影したとき怪盗機の存在を判定できるようにする。
また、怪盗機のいる方向を測定できるようにする。 宝の認識についてはまだ情報が出揃っていないため詳細な要求は未定。 静止時に特定の距離でなら認識できる程度の性能は最低限必要。 | 過去のドキュメント にアップロードされているプログラムをもとにOpenCVのライブラリを用いて実現させる。 |
| 赤外線による怪盗機認識 | 追跡 | 怪盗機までの距離と方向の目安がある程度分かるようにする。 | A/D変換用の基板を作成し、アナログ出力の赤外線センサーを使う。 センサーは前方用と側面用で合計3個使う。 |
| 高速走行 | 追跡 | 多少蛇行しながらでも怪盗機に追いつける速度で走行できるようにする。 怪盗機の走行速度についての情報はまだ無いものの、 新競技検討時に怪盗機の最高速度として30[cm/s]が例として挙げられたことがあるので、 暫定的に40[cm/s]を目標とする。 また壁への衝突頻度を極力下げる。 | シャーシの素材をアルミ複合板に変更することで機体を軽量化する。 シャーシの形状を円形にすることで壁との衝突頻度を下げる。 |
| I2C通信 | 拡張性向上 | 実用上十分な通信速度をもたせる。 また、来年度以降のMIRSで流用しやすいように 回路とプログラムを作成する際の難易度をできる限り下げる。 | スレーブ側はPICの割込機能で即座に応答できるようにする。
使用するマイコンを統一して割込処理の雛形を整えることで
来年度以降の班が流用する際の技術的難易度を下げる。 またCPUボードがI2Cバスを制御するためのボードは、 I2C通信を使用する他の班との共同開発にしてドキュメント整備に回す人員を増やす。 |
| 基板の縦置き | 省スペース化 | なるべく整備性を低下させずに省スペース化させる。 | L字金具でシャーシに垂直に基板を固定する。 ICや基板本体を取り外すことを考慮し、基板表側が機体の外側を向くように気をつける。 |
| LED点灯 | エンタメ性向上 | 観客の目を引く演出を行う。 また、バッテリーの消費をできるだけ増やさないようにする。 | LEDはPICで制御し、専用の電池で光らせる。 和風をテーマとして提灯をモチーフにした外装を作成する。 |
| 音声出力 | エンタメ性向上 | 観客の関心を引く演出を行う。 開発時間があまりかからないようにする。 バッテリーの消費をできるだけ増やさないようにする。 | 制御の容易さを重視してUSBスピーカーを使用する。 聞き取りやすく短い音声を選んで出力することでバッテリーの消費を押さえる。 |
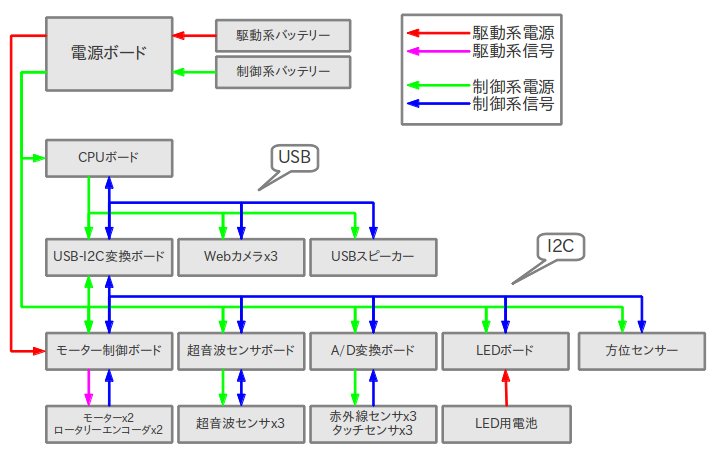
システム構成
システム全体の構成図を以下に示す。
周辺機器との通信にUSBとI2C以外の通信方式を使わないため
従来のシステムに比べてシンプルになっている。
I2Cデバイスに供給する電力はUSBバスパワーでは不安なので電源ボードから直接引く。
|
パート別開発要素
メカ
コンセプト : 整備性向上
開発要素 開発内容概略 担当者 シャーシ 素材をアルミ複合板に変更して軽量化する。
形状を円形にして壁への衝突頻度を下げる。
上段シャーシ中央を大きく切り取って整備性を上げる。高遠 バンパー 円形のシャーシに合わせてバンパーも曲げる。 高遠 エレキ
コンセプト : 拡張性向上
開発要素 開発内容概略 担当者 I2C変換ボード CPUボードがUSB通信でI2Cバスを制御するためのモジュールを作成する。
このボードの開発はMIRS1303,MIRS1304との共同プロジェクトとする。
MIRS1301:
高原,吉田谷A/D変換ボード A/D変換して結果をCPUボードに送るためのモジュールを作成する。 回路作成:大森
プログラム:高原超音波センサボード 超音波センサで距離を計測して、結果をCPUボードに送るためのモジュールを作成する。 回路作成:吉田谷
プログラム:鈴木LEDボード CPUボードからの指示でLEDを点灯させるモジュールを作成する。 回路作成:吉田谷
プログラム:大森モーター制御ボード 従来のモーター制御ボードにI2C通信機能を搭載させたモジュールを作成する。
モータードライバーはMP4212が現在入手しにくいそうなので互換のものを使う。
フォトカプラは従来と同じものを使う。ただし結線方法を変えてモーター1つにつき2個で済ます。
回路作成:岩田
プログラム:高原ソフト
コンセプト : 流用性向上
まず状態遷移図を以下に示す。
次にスレッドの分割方法と関係についての図を以下に示す。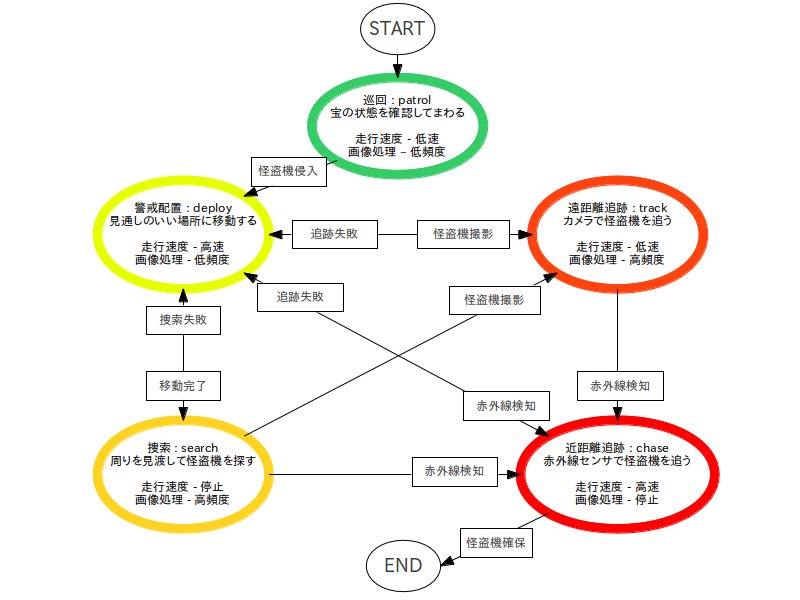
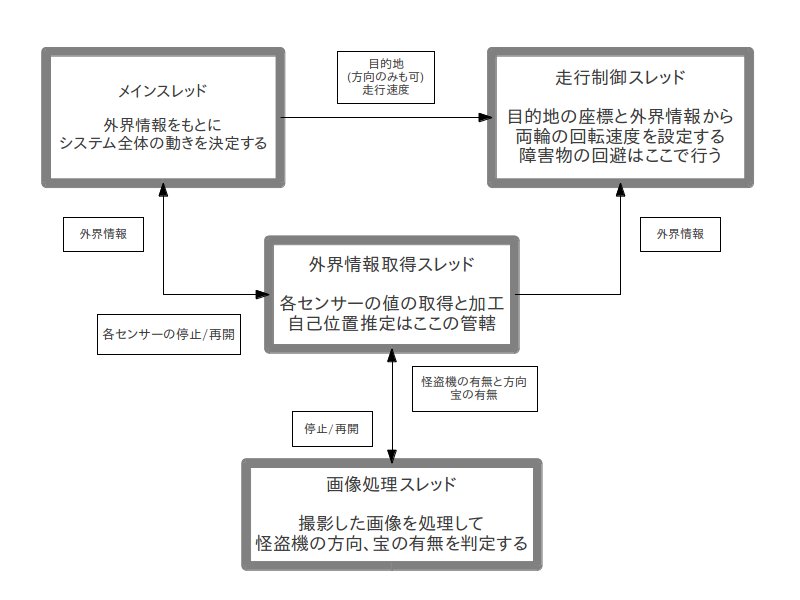
開発要素 開発内容概略 担当者 外界情報取得プログラム I2C変換ボードとの通信を行うプログラムを作成する。
ロータリーエンコーダ、方位センサ、 タッチセンサ、超音波センサからの情報をもとに、現在位置を算出するプログラムを作成する。高原 走行制御プログラム 8/10の体験入学で使用したプログラムをベースに、障害物回避の機能を増強する。 高原 画像処理プログラム 怪盗機および宝の認識を行うプログラムを作成する。 筧 巡回用プログラム 巡回動作を行うときのプログラムを作成する。 鈴木 追跡用プログラム 怪盗機の追跡時のプログラムを作成する。 高原
購入物品
| 品名 | 販売元 | 型番 | 価格 | 個数 |
|---|---|---|---|---|
| USBシリアル変換モジュール | 秋月電子通商 | AE-UM232R | 800円 | 1個 |
| PICマイコン | 秋月電子通商 | PIC16F1938 | 150円 | 10個 |
| 高輝度LED | 秋月電子通商 | OSW54L5B61P | 400円 | 1パック |
| 電池ボックス | 秋月電子通商 | BH-331-3B | 50円 | 2個 |
| バッテリースナップ | 秋月電子通商 | BS-EC | 10円 | 5個 |
| トランジスタアレイ | 秋月電子通商 | TD62783APG | 50円 | 1個 |
| ORゲート(USSボード用) | RSオンライン | SN74LS32N | 42円 | 1個 |
| 方位センサー | Strawberry-linux | HMC6352 | 1764円 | 1個 |
| 赤外線センサー | ダイセン電子工業 | DSR-542-TS | 700円 | 2個 |
| Webカメラ(正面用) | amazon | PlayStationEye | 2436円 | 1個 |
| Webカメラ(側面用) | amazon | BSW13K10HRD | 980円 | 1個 |
| アルミ複合板 | サインシティ | ACP-N36-EP | 2205円 | 1枚 |
| USB音声入力スピーカー | ラクデン | BSSP22URD | 980円 | 1個 |
| 合計 | 12707円 | |||
開発スケジュール
別ページに分けました。(開発スケジュール表)