はじめに
本ドキュメントは、新競技攻略のためのMIRS1301オリジナル機体のシステム提案書である。
チームコンセプト
「 唯我独尊 ~もう、憧れるのはやめた~ 」
システム概略
技術アピールポイント : 「通信革命」
今回の競技を攻略する上で必要な機能は、
自機・怪盗機・宝の位置を把握する機能と、 怪盗機に追いつける速度で移動する機能であると考える。
また急な仕様変更・機能追加が避けられない状況が予想されるので、 対策として高い整備性と拡張性が必要である。
今回の新競技がエンターテイメント性の向上を意識したものであるため、 来場者を飽きさせないよう「エンターテイメント性」にも重きを置く。
これらの機能をMIRS1301は次のような方法で実現させる。
| 機能 | 実現方法 | 担当者 |
|---|---|---|
| 自己位置推定 | ロータリーエンコーダによるオドメトリを、方位センサーで補助する。 また超音波センサとカメラで壁を認識することで誤差の累積を解消する。 | 高原 |
| 敵位置把握 | カメラによる画像処理で、相手のいる方向と相手までの距離を測定する。 相手までの距離が近い場合は赤外線センサーを併用して追跡する。 | 筧 |
| 宝位置把握 | 宝の形状などが不明のため具体的な戦略は未定。 基本的に超音波センサーと画像処理で対処する。 | 筧 |
| 敵より速く移動する | シャーシの素材をアルミ複合板に変更し、軽量化によって走行速度を上げる。 また機体形状を円形にすることで壁に引っかかりにくくする。 | 高遠 |
| 整備性 | MIRS1201同様、上段シャーシ中央に大きく穴を開けて下段の基板の整備を行いやすくする。 またMIRS1203を参考にして、バッテリーを垂直に置くことで省スペース化し交換しやすくする。 | 高遠 |
| 拡張性 | MIRS標準機は、CPUとセンサーの間の通信方法がセンサーごとにバラバラで分かりにくい。 また超音波センサ以外はバスを使用していないためセンサーの追加も難しい。 これを改善するため、各センサーとの通信方法をI2Cバスを使用したもので統一する。 | 高原・岩田・鈴木・吉田谷・大森 |
| エンターテイメント性 | 超高輝度LEDやUSBスピーカーで派手な演出を行う。 | 岩田・吉田谷・大森 |
変更点詳細
メカ
担当者 : 高遠
変更点 目的・理由 懸念される問題点 技術性 エンターテイメント性 シャーシの素材をアルミ複合板に変更する。 車体重量軽減による走行速度上昇。 シャーシの強度が低下する。 ○ シャーシの形状を円形に近づける。 壁に引っかかる頻度の低下。 基板や部品を置くスペースの減少。 ○ 上段シャーシ中央に大きく穴を空ける。 下段の基板の整備性向上。 基板や部品を置くスペースの減少。 ○ CPUボード、FPGAボードはMIRS1201同様に垂直に設置する。 省スペース化。 整備性は落ちるが、ほとんど整備する必要のないボードなので問題ない。 ○ エレキ
担当者 : 吉田谷・大森・岩田 (PICのプログラムは高原・鈴木)
変更点 目的・理由 懸念される問題点 技術性 エンターテイメント性 方位センサーの導入。 ロータリーエンコーダによる自己位置推定の補助。 モーターから十分に遠ざけなければ、磁気で誤差が生じる可能性がある。 ○ 超音波センサーを前年度から引き継いだもの(パララックス社#28015)に変更する。 動作が安定化し、最小3cmまで測定可能になる。 基板とプログラムを作成する必要がある。 ○ 超音波センサーを制御するPICをひとつにする。 もともと干渉を防ぐために1つづつしか使用しないので、 PIC1つで制御して、省スペース化する。 プログラムの変更点は少ないので特になし。 ○ 赤外線センサー(アナログ出力)を導入する。 近距離での怪盗機追跡能力向上 基板とプログラムを作成する必要がある。 ○ センサーとの通信はI2Cバスで統一する。 具体的には、USBシリアル変換モジュールによって CPUとI2Cマスター用PICを接続してI2Cバスを構築する。 小型デバイスに広く使われているバスで通信方式を統一することで 拡張性を向上させ、新規デバイス導入時の開発時間を短縮する。 技術調査に時間をかける必要があるため、開発時間が不足する可能性がある。 ◎ オートフォーカス機能搭載のカメラを使用する。 相手までの距離を測定するためには正しくピントを合わせる必要がある。 カメラの金額が上がる。 ○ 超音波センサーにはカメラを並べる。 壁か怪盗かの判定が必要。 画像処理時間の増大。 撮影頻度をできるだけ下げて対応する。 ○ 超高輝度LEDを使用したモジュールを作成する。 観客の目を引く。 やりすぎると眩しくなり消費電力が増大する。 ◎ USBスピーカーを搭載する。 音で観客の意識をMIRSに向ける。
MIRSの状況をMIRS自身に説明させる。まだ接続して認識されるのか不明。 ○ ソフト
担当者 : 高原・鈴木・筧変更点 目的・理由 懸念される問題点 技術性 エンターテイメント性 自己位置推定用のスレッドを作成する。 自己位置推定を行うためにはできるだけ短い周期で ロータリーエンコーダの値を読む必要がある。 特になし。 ◎ 目標地点に向かう経路を求める関数を作成する。 最短ルートで怪盗に近づくため。 処理に時間がかかる可能性がある。 ○ 指定された経路を追従して移動するための関数を作成する。 直進と回転の組み合わせではタイムロスが生じる。 アルゴリズムの調査が必要。 ○
購入予定物品
| 物品 | 要求 | 製品例 | 金額 |
|---|---|---|---|
| 方位センサー | 分解能 0.1 deg以下 | HMC6352(Strawberry-linux) | 1764円 |
| 赤外線センサー | アナログ出力 | DSR-542-TS(ダイセン) | 700円 x 2個 |
| カメラ(正面用) | オートフォーカス機能搭載 | PlayStationEye | 2436円 |
| カメラ(側面用) | 低価格 | BSW13K10HRD(バッファロー) | 980円 |
| USBシリアル変換モジュール | レベル変換機能付き | AE-UM232R(秋月) | 800円 |
| PIC(I2Cマスター用) | USART、MSSPモジュール搭載 | PIC16F883(秋月) | 150円 |
| PIC(I2Cスレーブ・センサー制御用) | SSPモジュール搭載 A/D変換機能搭載 小型 | PIC16F88(秋月) | 200円 x 5個 |
| 超高輝度LED | 高輝度 | OSW54L5B61P 10本セット(秋月) | 400円 |
| アルミ複合板 | 低価格 | アルビー ACP-N36-EP バラ 910x1820x3 | 2205円 |
| USBスピーカー | 低価格、個性的な見た目 | ドロイド君 USB スピーカー | 850円 |
機体概形
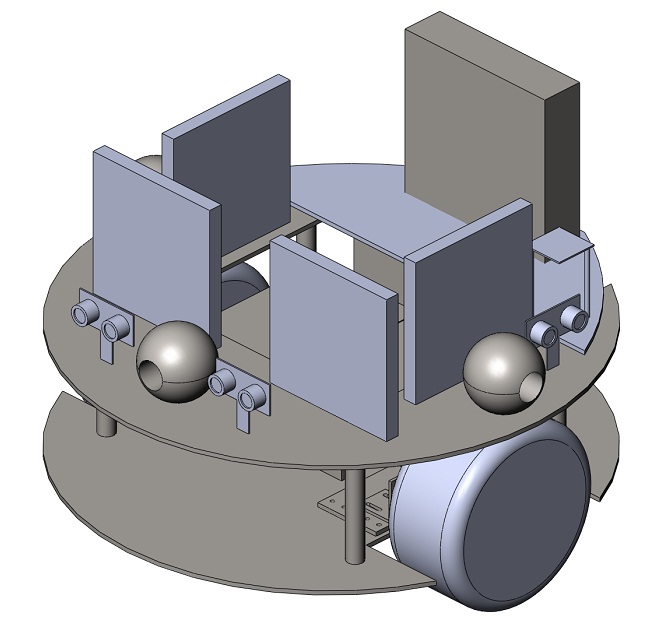 | |
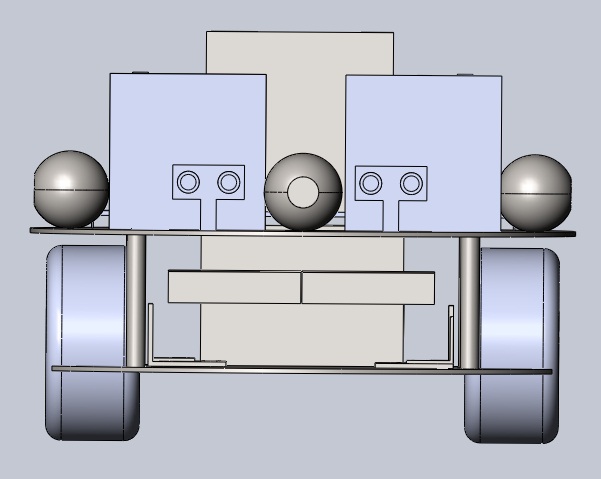
| 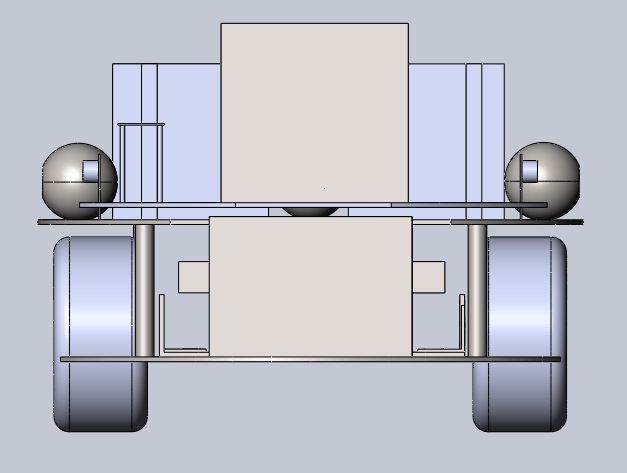 |
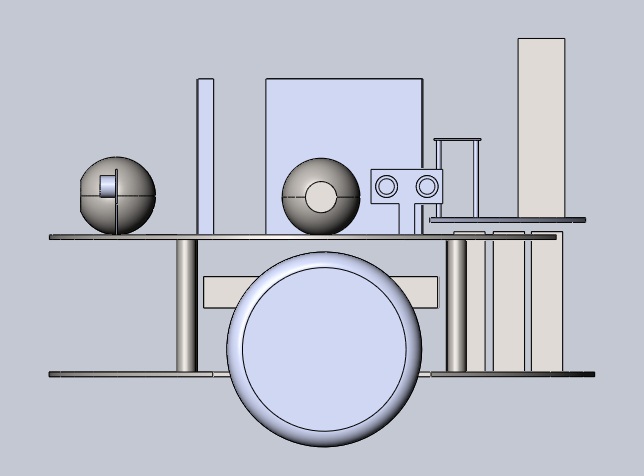
| 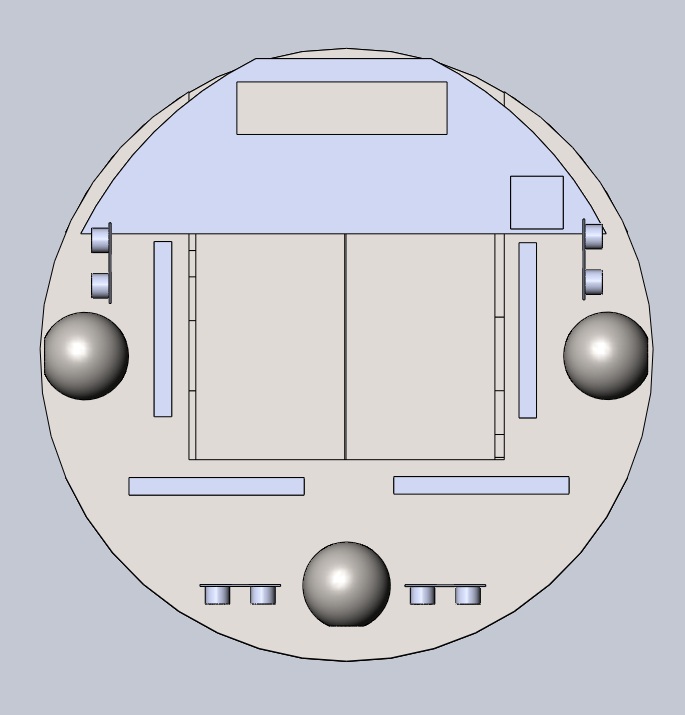 |