- 本ドキュメントは、MIRS1205のシステムの基本設計をまとめたドキュメントである。
- MIRS1205が求める機能、性能を以下に示す。
- 壁への接触をなるべく避けた走行をする
- 姿勢補正を正確に行う
- 画像認識を正確に行う
- 仕掛け攻略時に車体を安定させる
- ハード面での動作不良を減らす
- デバックを効率化する
- 壁への接触をなるべく避けた走行をする
- →超音波・モーター・エンコーダ周りの不安要素を排除して正確な制御を行う。
- 姿勢補正を正確に行う
- →超音波・エンコーダの値から正確な姿勢補正可能なアルゴリズムを考案する。
- 画像認識を正確に行う
- →白線上の補正・再読取り・認識できないときの動作プログラムの作成。
- 仕掛け攻略時に車体を安定させる
- →サスペンションを取り付けてシーソー、ステップ攻略を安定させる。
- ハード面での動作不良を減らす
- →バンパの形状変更。また、基盤のコネクタを変更して誤動作を減らす。
- デバックを効率化する
- →新しい基盤(開発要素参照)・電圧表示ボードを追加する。
これらのことを実現するために、以下の物品を購入予定である。
使用箇所 物品 個数 単価 販売元 担当者 コネクタ ターミナルブロック 3ピン(青)縦 10個 30円 秋月電子 山本 コネクタ ターミナルブロック 3ピン(緑)横 20個 60円 秋月電子 山本 電源基盤 LCDデジタルパネルメータ(黒)PM-128E 1個 1000円 秋月電子 佐野 電源基盤 006P型アルカリ電池(6F22)9V(GP製) 5個 150円 秋月電子 佐野 PC操作 無線キーボード 1個 2000円程度 PC-DEPO(予定) 佐野 PC操作 無線マウス 1個 2000円程度 PC-DEPO(予定) 佐野 計 約5950円
- →白線上の補正・再読取り・認識できないときの動作プログラムの作成。
- ブロック図を以下に示す。
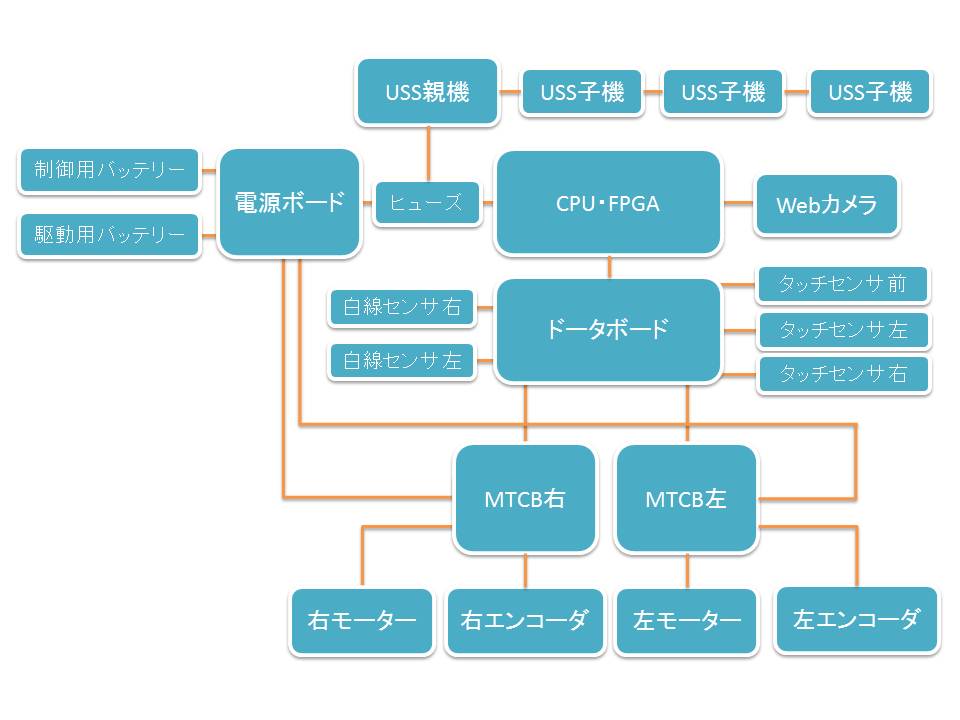
- 基盤
-
標準機の基盤は配線の抜き差しが大変で、その際に基盤を壊す可能性があった。そのため、コネクタの変更を行い配線不良が起こりにくい構造とする。具体的にはMTCBを現行のものからDCジャックへの変更を考えている。
- バンパ
-
標準機のバンパでは角が死角になり、タッチセンサで検知できないためペットボトルなどを加工して角をカバーできるような構造のものを作成する。
- 超音波センサ
-
超音波センサは1つ新規作成し、既存のものと合わせて計4つ使用する予定である。
- 電源基盤
-
電圧計を電源基盤に追加し、バッテリーからの供給電圧を常に監視できるようにすることで開発環境の利便化を図る。
- サスペンション
-
シーソーやステップを攻略するためのサスペンションを作成する。引き継ぎのものは劣化が目立つため、去年の1102班の設計仕様を参考に新しく作成する。
- モーター
-
初動や停止時の慣性によるエンコーダのズレを防ぐため、モーターのギヤ比をよりトルクの大きいものに変更する予定である。
ソフトウェア
各仕掛け攻略用・および統合プログラムの動作内容を示す。
- 統合プログラム
-
通路走行用プログラムをメインとして、switch_cace文を用いてその都度仕掛け攻略用の関数を呼び出す。スレッドの作成、呼び出しはその関数内で行う。
- Direction Board
- 白線センサーで白線を読んだらストップ
- 正対補正をした後,中央補正
- 画像処理
- それぞれの数字を認識
- 優先度と比較して処理を決定
- ロータリー
- 直進
- タッチセンサーで内壁を確認
- 内壁に沿いながら反時計回りで周回動作
- 90°周回するごとに停止して超音波計測
- 外壁との距離が一定距離まで遠ざかったと検知した場合90°左に回転
- 直進
- 小部屋
- 前後左右の壁の有無により小部屋と認識(①正面と左右どちらかの壁がない状態、②正面と左右両方の壁がない状態)
- 小部屋における自分の位置を確認する(①のときは小部屋の一辺の端、左右の壁の有無でどちらの端にいるかがわかる。②のときは小部屋の一辺の真ん中)
- 時計回りに壁に沿って進み、超音波で出口を探す
- 出口を見つけたら90°回転して直進
- シーソー・ステップ
- 鍵・ドア
- 鍵のある方向へ回転
- 通常より速度を落として前進
- タッチセンサーが押されたらストップ
- その後、180°回転し通路走行にもどりドアを通過する
- 通路
- 超音波で左右の壁との距離に応じて補正を加えながら直進
- タッチセンサーが押されたらストップ正対補正
- 白線センサを検知した場合、画像認識処理に移行する
- 直進
- 行き止まり
- ゴール
- 通路走行で超音波センサで左右の壁との距離に応じて補正をしながら直進
- 白線を検知し白線の幅がDirection Board前のものと違うことを確認するために前進して白線の有無を検知
- 白線があった場合ゴールと判断し終了動作を行う。
- プログラム終了!!!
ハードウェア
-
ソフトウェアでは制御を行わない。
-
数字認識で行き止まりを避ける
動作内容は基本的に、目標値を設定しておき、それに追従するようにモーターを制御する。
沼津工業高等専門学校 電子制御工学科