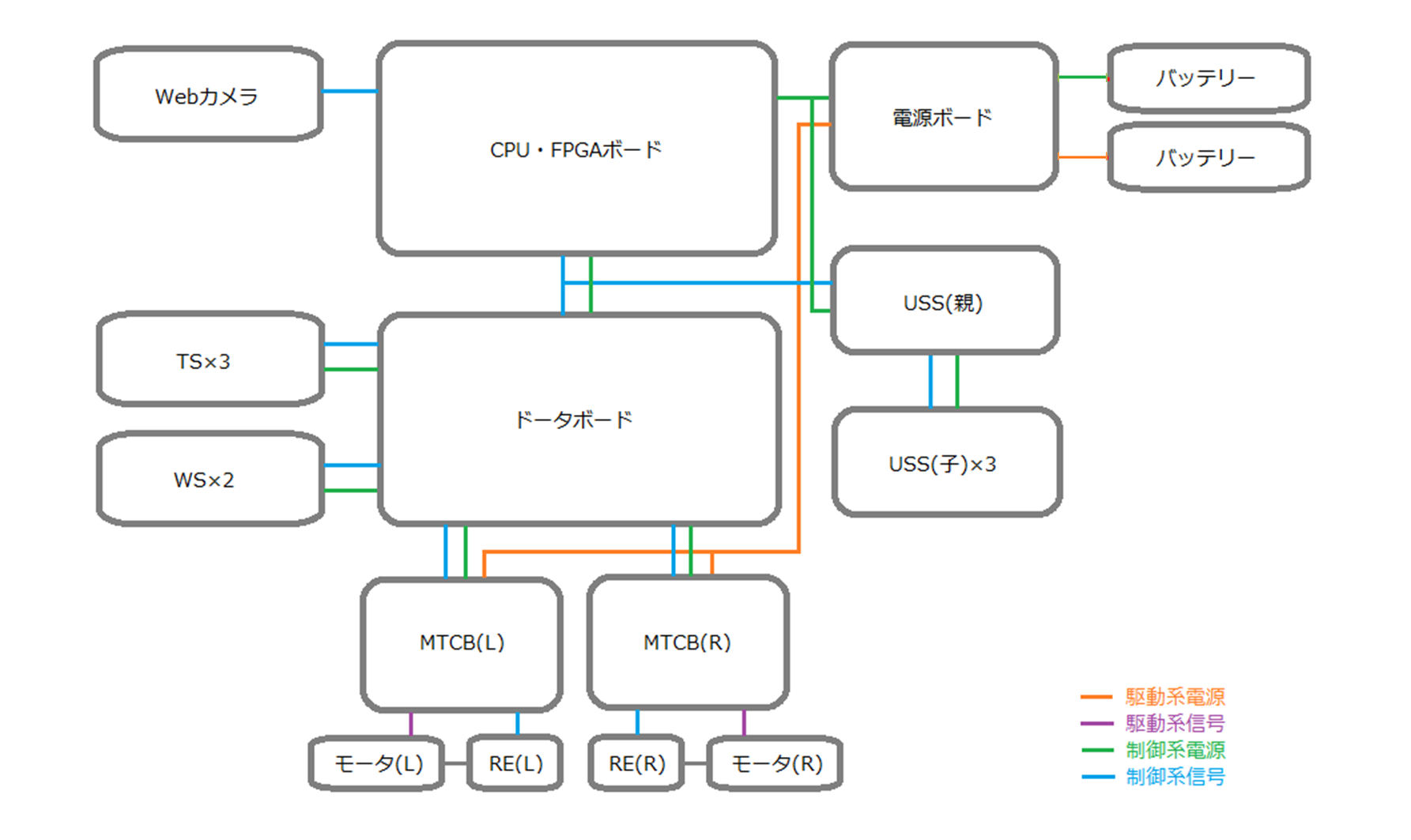
2.システム全体構成図
| 名称 | MIRS1203 システム基本設計書 |
|---|---|
| 番号 | MIRS1203-DSGN-0002 |
最終更新・2012.11.19
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2012.11.19 | 遠藤祐太朗 | 江上 | 初版 |
| 部品名 | 備考 |
|---|---|
| 上段シャーシ | PET素材で新たに小型のものを作成 |
| 下段シャーシ | PET素材で新たに小型のものを作成 |
| 正面タッチセンサ | PET素材でシャーシの弧に沿う形状のものを作成 |
| 左右タッチセンサ | PET素材でタイヤの後方まで弧を描いて覆いかぶさるような形状のものを作成 |
| タイヤ | アルミ素材で作成。タイヤの厚さを標準機よりも細くし、径は同じサイズにする。 |
| 物品名 | 販売元 | メーカー | 型番 | 価格 | 個数 |
|---|---|---|---|---|---|
| 秋月電商 | Alphaplus Connectors & Cables Corp. | TB111-2-2-U-1-1 | ¥20 | 40 | |
| 秋月電商 | Alphaplus Connectors & Cables Corp. | TB113-2B-2-U-0-2-1 | ¥40 | 40 | |
| 秋月電商 | Alphaplus Connectors & Cables Corp. | TB111-2-3-U-1-1 | ¥30 | 20 | |
| 千石電商 | サトーパーツ | ML-40-S1BYF-5P | ¥170 | 5 | |
| 秋月電商 | 各社 | ¥50 | 10 | ||
| 秋月電商 | 各社 | ¥50 | 10 | ||
| ¥4850 | |||||