| 名称 |
MIRS1203 システム提案書 |
| 番号 |
MIRS1203-DSGN-0001 |
最終更新日:2012.11.16
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2012.11.16 |
全員 |
江上 |
初版 |
目次
1.はじめに
-
本ドキュメントは、MIRS1203オリジナル機体についての提案書である。
2.システム概要
-
- コンセプト
速さを重視した機体、プログラムでタイムボーナスでの高得点を狙う。
ハード変更点
- シャーシの小型化。
[メリット]
- 円形にして角をできるだけ少なくすることにより、壁との突っ掛りを軽減できる
。
- ロータリーをスムーズに攻略できるようになる。
- 軽量化にもつながる。
[デメリット]
- コード類の取り回しが大変になる。
⇒最適な長さのコードを作り直すなどして対応。
- プログラムのゲインやモーターに関するパラメータの変更が必要。
- シャーシの素材の変更(PET)
[メリット]
- 慣性の影響が少なくなるので,目標の位置を超えて止まってしまう問題を軽減できる。
[デメリット]
- 強度が落ちる。
- シーソー、ステップ攻略のために、前方の補助輪を外して重心を後ろに持ってくる。
エレキ変更点
- 最小3cmまで測定することのできる新しい超音波センボードを作成(標準機のものではPICのプログラムを書き換えても20cm以下を測定することは不可能なため)
[メリット]
- 近い距離を測れるようになるので、通路走行の精度が上がる。
- 場所を選ばずに正体補正ができるようになる。。
[デメリット]
- 新しいボードを作成しなければならない。
ソフト変更点
- 走行中に各センサで状況を判断し、各仕掛け攻略プログラムに飛ばせるようにする
[メリット]
- 画像認識が失敗してもコースを攻略できるようになる。
[デメリット]
- 各センサの信頼性がなければいけない。
- 画像認識プログラムの改良(精度の向上、撮影回数を減して時間短縮)
[メリット]
- 成功率の高い仕掛け、高得点を得られる仕掛けを選びやすくなる。
[デメリット]
- プログラムの開発に時間がかかる。
3.システム外観図
-
システムの外観を図に示す。
- 小型・軽量化の為に基板を縦に配置
- 超音波センサ、は新規に作成するものと標準機のもの、両方をを取り付けられるようになっている。上段シャーシに正面向きを1つ。下段シャーシの前方に左右に向けて2つ取り付け、後方にも右側に向けたものを1つ付ける。
- 白線センサは正面に2つ取り付ける。
- 交換しやすいようにバッテリーを縦に配置
- バンパーは正面、左右の3つを付ける。左右のバンパーはタイヤの後ろまで覆いかぶさるような弧を描く形にする。
- 補助輪は後方のみに取り付ける。
- 新しいタイヤによって走破性が向上し、よりスタイリッシュに!
- 幅260mm 重さ2.5kg
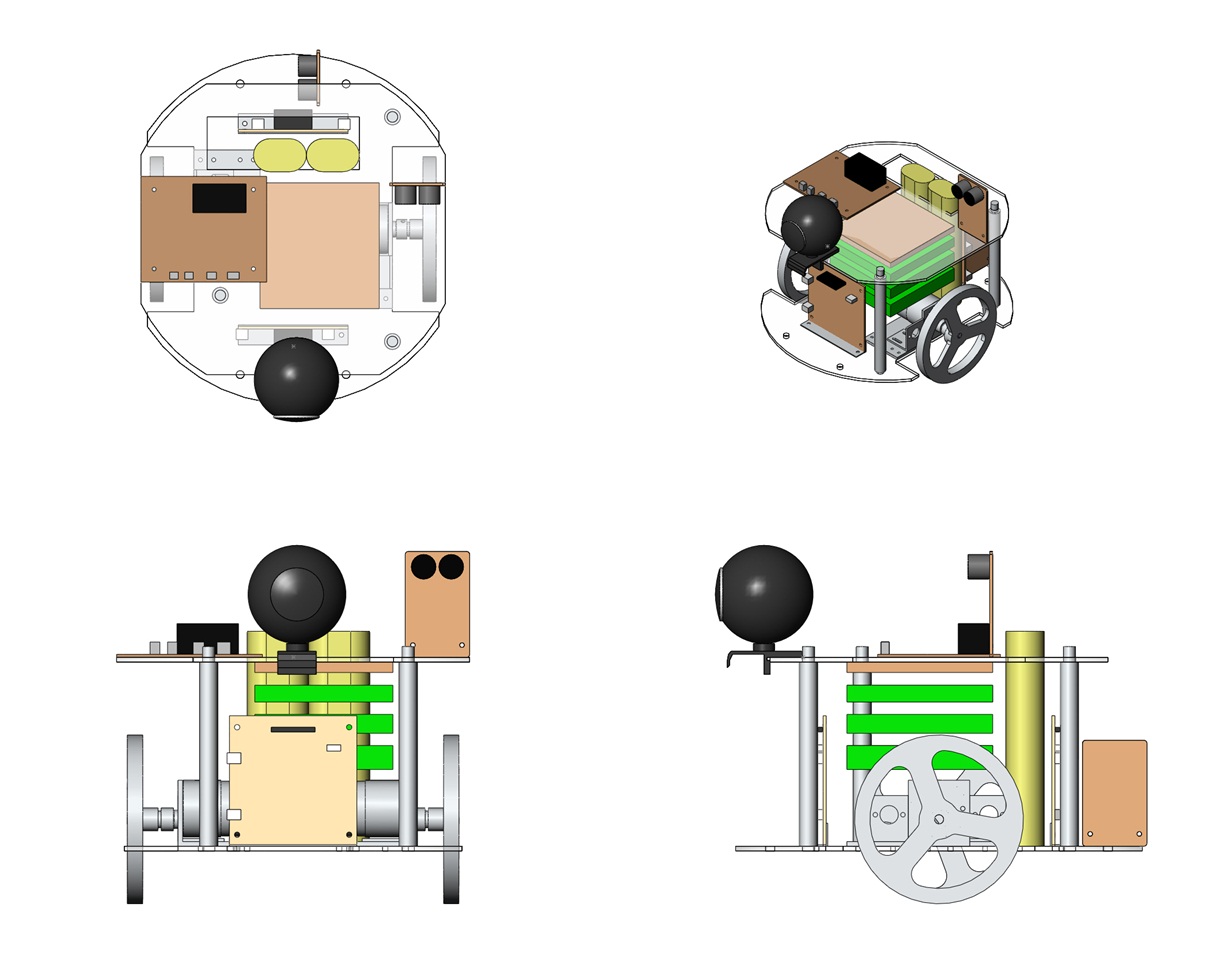
図:システムの外観図
4.コース攻略方針
-
画像認識だけに頼らない状況判断・仕掛けの攻略
- タッチセンサ・超音波センサ・白線センサを駆使することによって、通路走行の中で、各仕掛け・行き止まり・ゴールを認識し攻略する。
- DBでは自分が得意とする物を選択するのみにする。
※プログラムの改良による精度の向上はしていくが、あくまでも補助的なものとして使う。
- 無理に画像認識をせず、失敗した場には、そのまま先へ進む
これによって、画像認識の失敗による時間のロスや、誤認識による問題の発生を防ぐことができる。
MIRS1203ドキュメント管理台帳