最終更新日:2012.10.5
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2012.8.11 | 松永、二見、前川、秋山 | 初版 |
目次
-
1. はじめに
2.標準機組立報告
3.サンプルプログラム試験結果
3.1 直線走行の試験結果
3.2 回転の試験結果
3.3 回転走行の試験結果
3.4 数字認識
4.仕掛けクリア試験の結果
4.1 ロータリーの試験結果
4.2 T字の試験結果
4.3 数字認識の試験結果
5.開発スケジュール
-
本ドキュメントは、MIRS1202の標準機走行の試験結果を記したものである。
尚、本試験は体験入学に向けた動作試験であり、後述するすべての項目で良好な動作を保証するものではない。
1.はじめに
-
走行試験に先立ち標準機の組み立てを行った。組立には以下の組立手順書を参照した。
組み立て手順書
シャーシにMCBや電源ボードを取り付ける際にねじ穴の位置がずれていて取り付けが困難だった。
また、バンパーを取り付けるための蝶番が4個しかなく、バンパー一枚につき2個蝶番を使うと数が不足してしまうので、正面のバンパーに2個、左右のバンパーに1個ずつ蝶番を使用した。
2.標準機組立報告
3.2 回転の試験結果
詳細を以下に示す。| 試験内容 | 試験結果 | 担当者 | 実施日 | 備考 |
|---|---|---|---|---|
| 90deg回転させるのに何秒かかるか調べた。また、回転方向をそれぞれ左右回転するか調べた | 。90deg回転させるのに対して約3秒時間がかかった(目視で)。また左右両方から回転することを目視によって確認した。これらは初回の時点で成功した。目視によって確認したので、念のためにもう一度してみた結果は同じで成功した。 | 佐藤、二見、森川 | 8/11 |
3.3 回転走行の試験結果
詳細を以下に示す。| 試験内容 | 試験結果 | 担当者 | 実施日 | 備考 |
|---|---|---|---|---|
| 回転半径、何度まで回転するかを設定し、その行動を十分満たせる時間で動作させた。回転半径を20cmとし、回転を180°にして動作させて初期値からまっすぐ40cmかどうかしらべ、誤差が距離角度ともに誤差3%以内なら動作試験をよしとした。また、回転半径を20cmとしたのは、想定するロータリーの大きさと中心の円柱の直径から決めた。 | 初期の段階で正しい行動をしたのでよしとした。 | 佐藤、二見、森川 | 8/11 | |
3.4 数字認識
詳細を以下に示す| 試験内容 | 試験結果 | 担当者 | 実行日 | 備考 |
|---|---|---|---|---|
| 数字を二つ用意して読み取らせる。二つとも認識しているか目視によって確認した。また、単体で使用した場合、数字「0」~「9」まで全ての数値を読み取った。 | 二枚の場合の数字認識をすることはできなかった。ただし、片方だけ認識した。 | 二見 | 8/11 | |
-
-
時間が残りわずかであった為、最低でも、標準プログラムの走行制御モジュールを用いてシーケンス制御で攻略ができるように開発を進めていった。
- プログラムの動作内容
以下の図を用いて説明する。
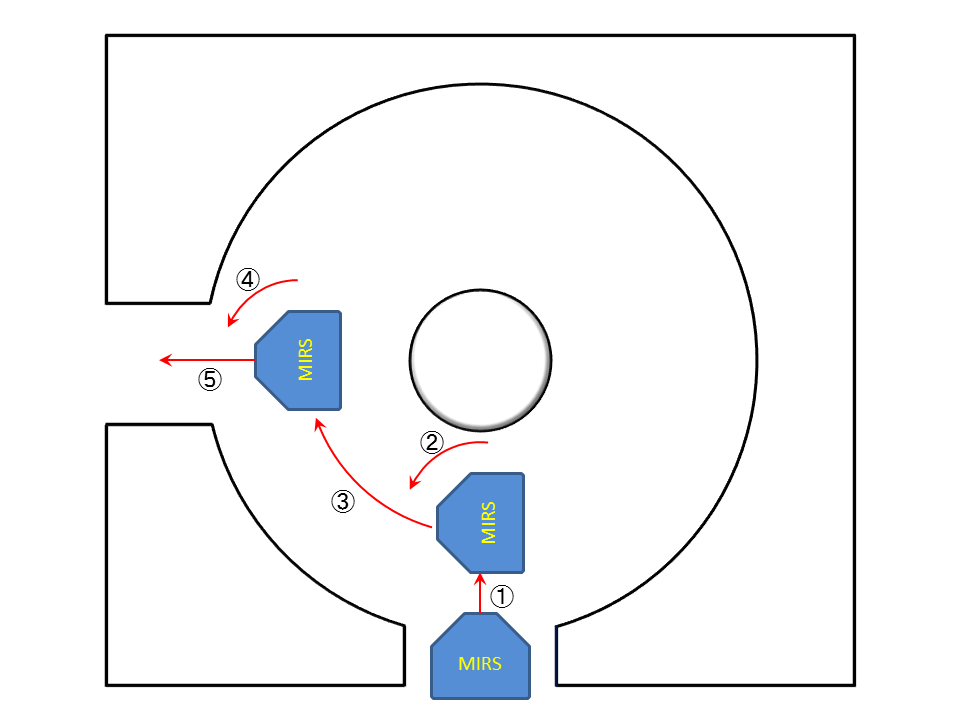
まず、プログラム実行時にロータリーの旋回角度をキーボードより指定し、
①39.5cm直進
②90度反時計回りに回転
③半径32.5cmで時計回りに指定した角度分旋回
④90度反時計回りに回転
⑤39.5cm直進
といった動作内容とした。
- 試験結果
最初は手違いで旋回動作から始まってしまうプログラムを実行してしまい、何度か失敗してしまったが、その場でプログラムを戻して、ロータリーの走行を成功することができた。
- 問題点と改善案
この試験で用いたプログラムについて挙げられた問題点と、それに対する改善案について述べる。
問題点
ⅰ)旋回角度を最初に指定しなければならない。
ⅱ)スタート地点の微妙なズレで、旋回中に壁に当たってしまう。
改善案
ⅰ)動作内容で用いた図における、①の動作を始める前の地点で、左に45度回転してキャプチャ→右に90度回転してキャプチャという動作行い、画像処理でロータリーの左右の壁に抜け出し穴があるかどうか確認することで、抜け出し穴の位置を確定してから旋回角度を指定する。
ⅱ)超音波センサで真ん中のポールの位置を読み取り、スタート位置を一定(47cm程度)にする。(通路の中央にうまく位置する必要がある。)
それに加えて、旋回中に障害物に当たったことをタッチセンサなどで検知して復帰する。
- プログラムの動作内容
4.1 ロータリーの試験結果
-
プログラムを作ってる時間が少なかったのでT字路を攻略するプログラムを途中までしか作ることができなかった。
- プログラムの動作内容
T字攻略プログラムは超音波センサーを使い、壁との距離を一定に保ち通路走行して正面の壁から50センチの距離に来た時に止まるプログラムを作成した。
- 試験結果
通路走行中に超音波センサーが誤動作を起こしてしてしまい通路途中で止まってしまった。
- 問題点と改善案
超音波センサーが誤動作を起こした原因として、側面に設置した超音波センサがドータボードや配線に反射した超音波を検知してエラーが起きてしまったと考えられる。改善点として超音波の取り付け位置を工夫して干渉が起きないようにするべきである。
- プログラムの動作内容
4.2 T字の試験結果
-
数字認識プログラムは作業時間の都合上改良できず、仕掛けクリア試験はサンプルプログラムのまま行った。
結果は、数字2つのうち1つしか認識せず、失敗となった。
以下にサンプルプログラムを使用して失敗した原因を記しておく。
- 画像認識失敗の原因
→プログラムはキャプチャした画像を中心を境に半分に分割して2つの画像としてそれぞれに数字認識を行う。したがって、カメラの位置などによりて画像の分割位置がずれると数字認識がうまく行われないので、それが原因なのではないかと思われる。
- 画像認識失敗の原因
4.3 数字認識の試験結果
-
時間が残りわずかであった為、最低でも、標準プログラムの走行制御モジュールを用いてシーケンス制御で攻略ができるように開発を進めていった。
4.仕掛けクリア試験の結果
-
高専祭プレ競技会までの開発のスケジュールを示す。ただし、あくまで予定であるので、状況に応じて変更はある
項目 内容 担当 10月5日 >10月15日 10月19日 10月22日 10月26日 10月29日 11月2日 ロータリー 攻略プログラム 秋山 開発 開発 テスト デバック 統合 テスト 完成 小部屋 攻略プログラム 伊与田 T字路 攻略プログラム 木村 数字認識 攻略プログラム 前川
5.開発スケジュール
沼津工業高等専門学校 電子制御工学科