最終更新日:2012.10.22
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2012.10.22 | 秋山,伊與田,木村,前川 | 初版 |
目次
- 本ドキュメントは、標準機を使用した迷路攻略に関するソフトウェア中心の開発計画書である。
1.はじめに
-
MIRS1202 基本戦略
~安定した走行と簡単化への挑戦~- 基本プログラムを流用してプログラミング
- 画像処理を駆使
2.基本戦略
- 全体の流れを下に示す.
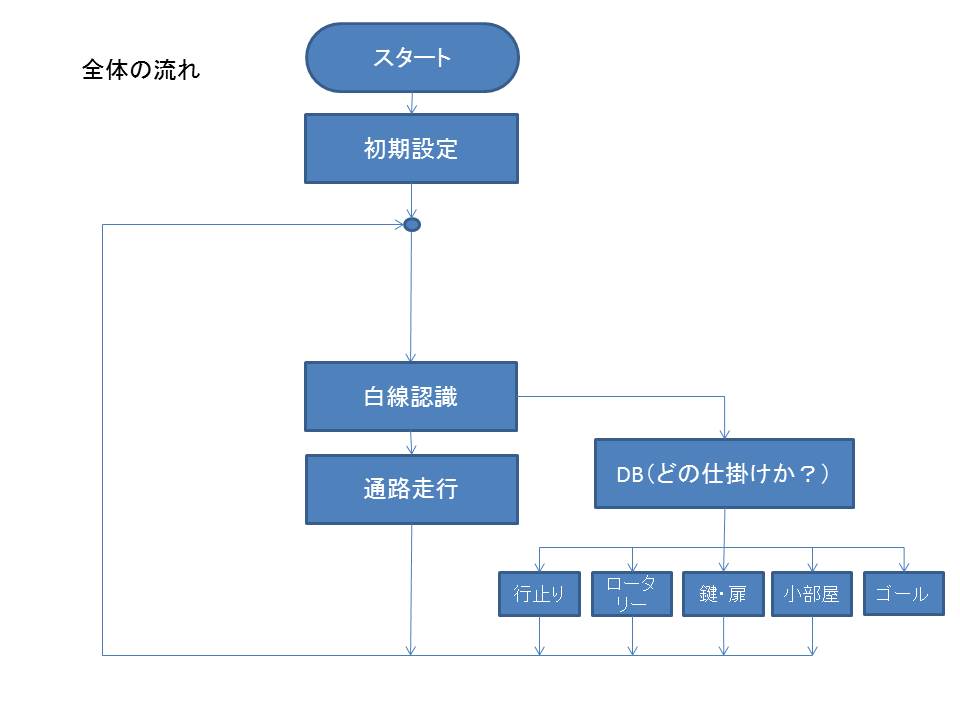
上の流れを達成するためのmain関数のフローチャートを以下に載せる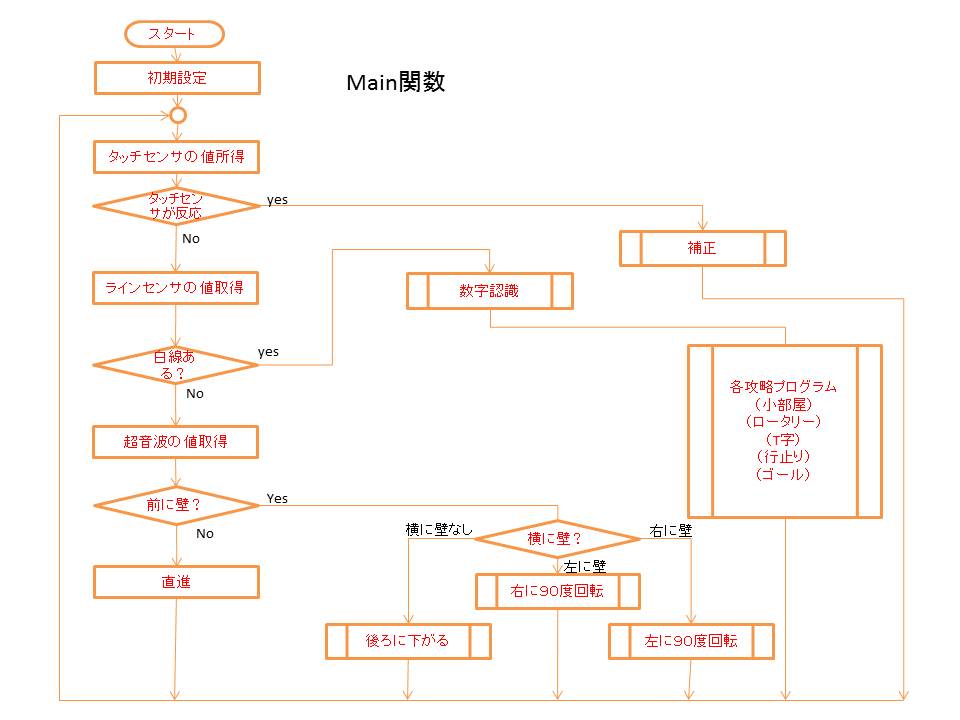
main関数で通路を走行し、白線を検知すると数字認識を行いそれぞれの攻略プログラムに移動していく
main関数で直進するフローチャートを以下に示す。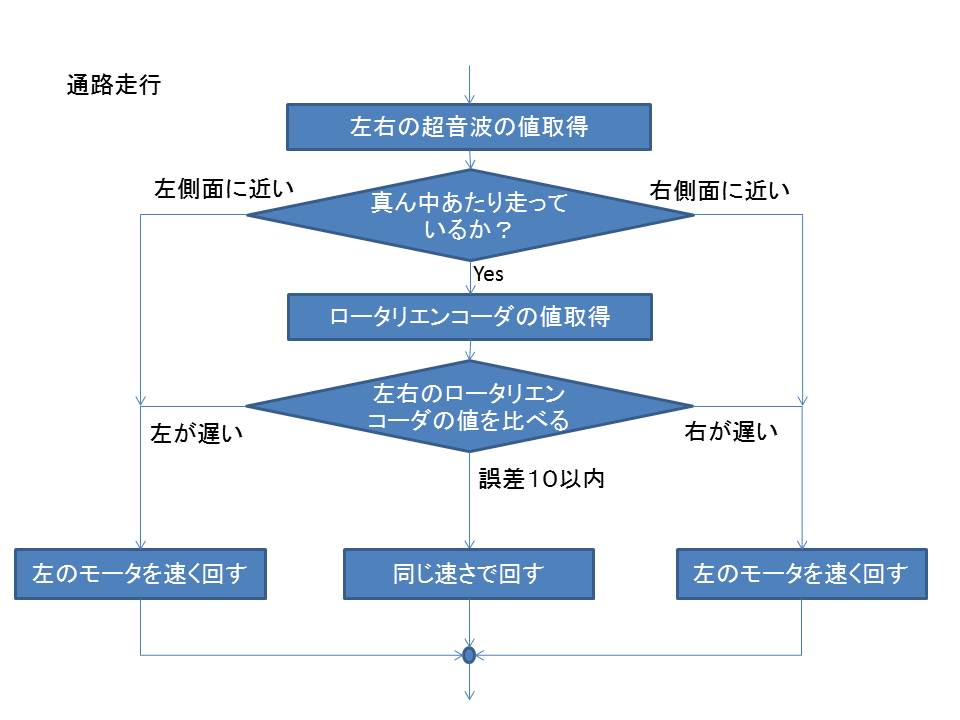
3.動作の流れ
4.2 ロータリー
ロータリーの攻略のフローチャートは以下の通りである。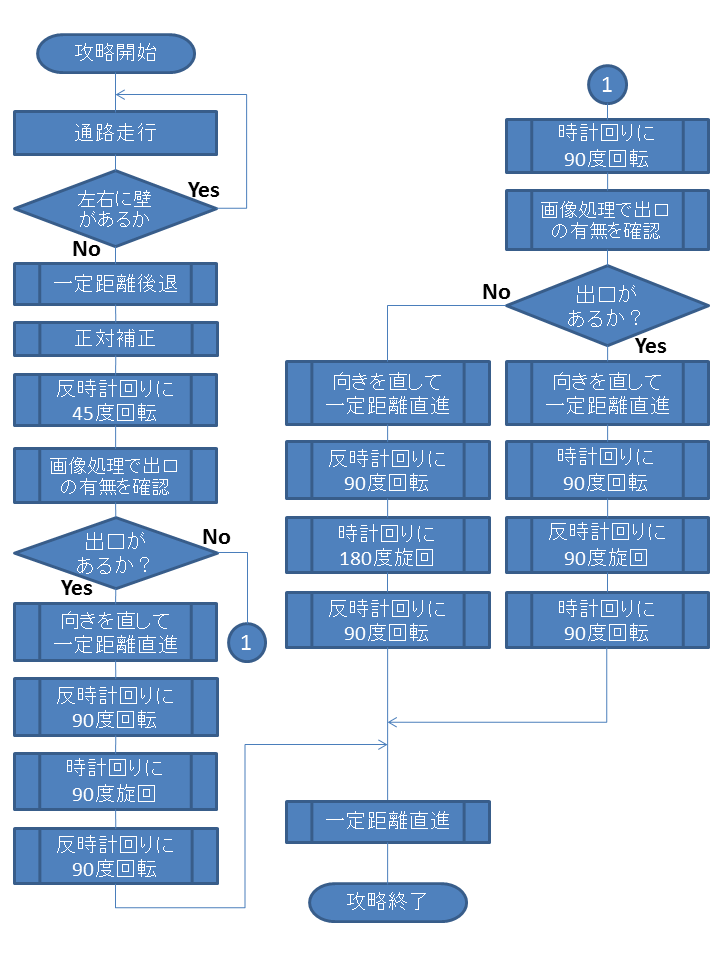
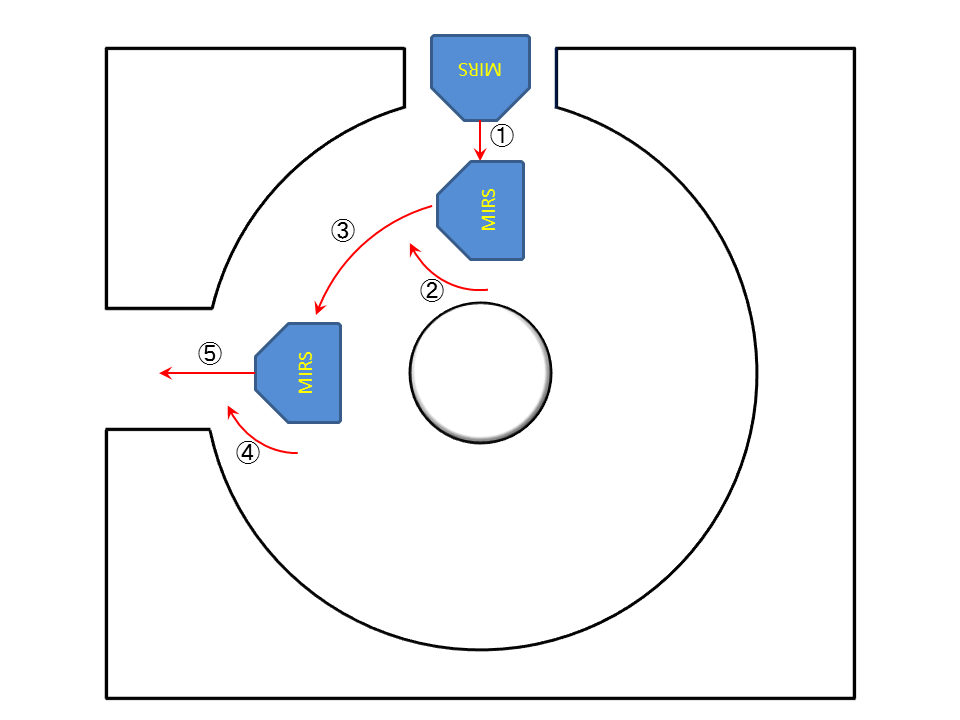
この動作の概略図を以下に示す。
直進、回転、旋回動作には、標準プログラムに改良を加え、超音波センサ、タッチセンサの値を監視して状況に応じて復帰動作などを行えるようにした関数を用いる。
補足として、画像処理で出口の有無を確認する関数exit_detect()のフローチャートと、これに用いられる画像の例を以下に示す。
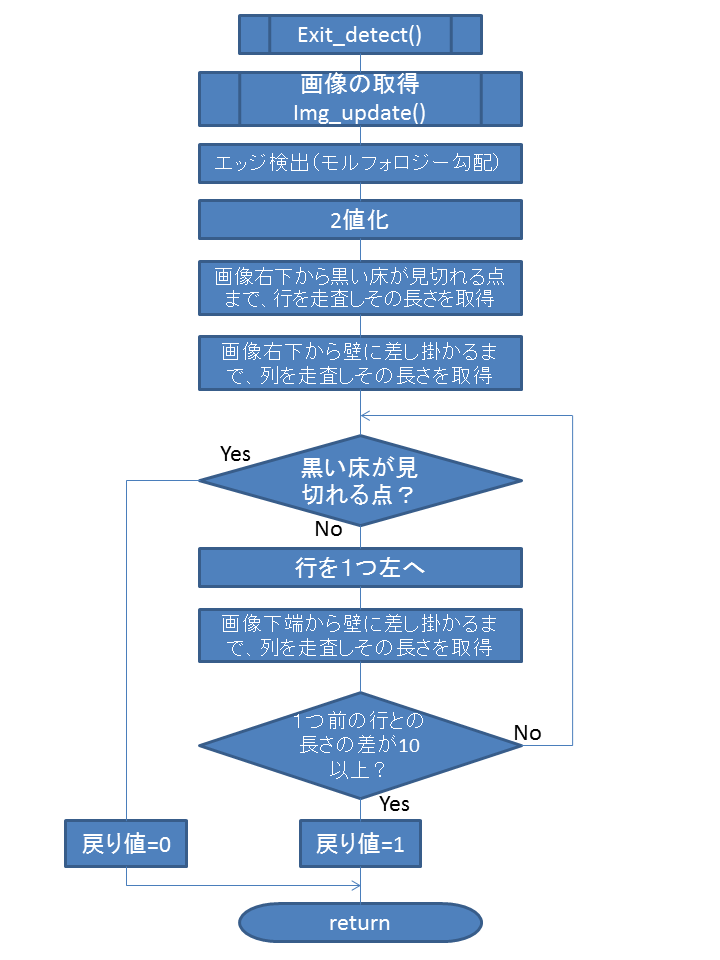

このフローチャートで説明した関数は、上の画像のような、ロータリーに入って左側の壁に出口があるかどうかを探すものになっているが、実際の攻略の際には、引数で指定することによって、左側と右側の壁両方の壁を確認できる関数を用いる。
4.3 小部屋
前進走行をしながら超音波センサによる測定を行い攻略する予定。
日程次第で正確な判断ができるように安定性を求めて改作していく。
壁の有無については実際に測定を行って、後日値を決定する。
4.4 鍵・扉
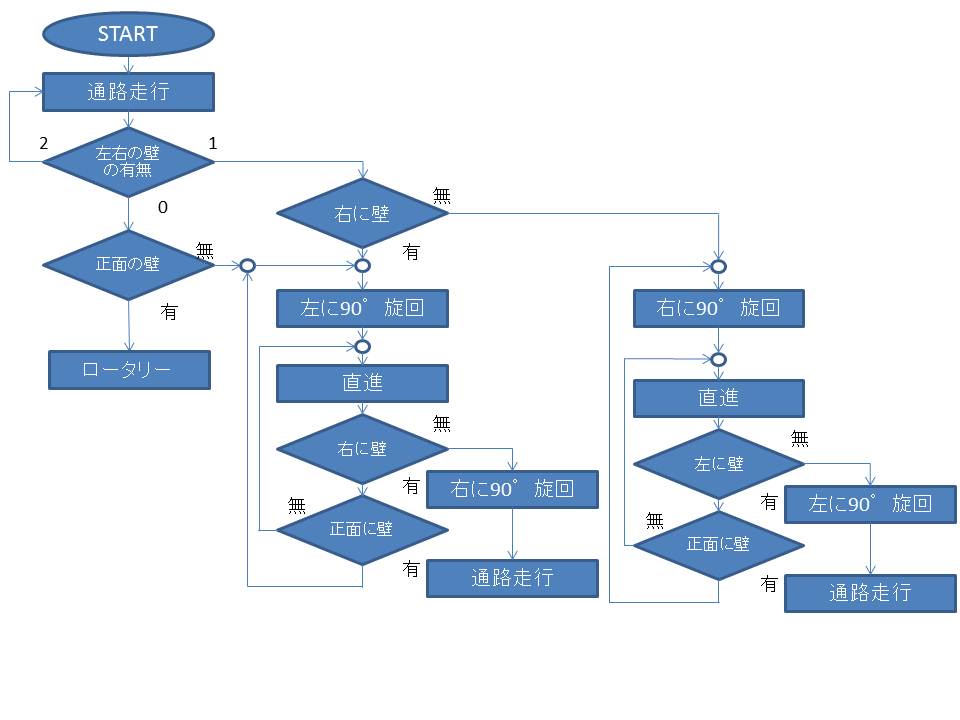
鍵・扉の攻略フローチャートは以下の通りである。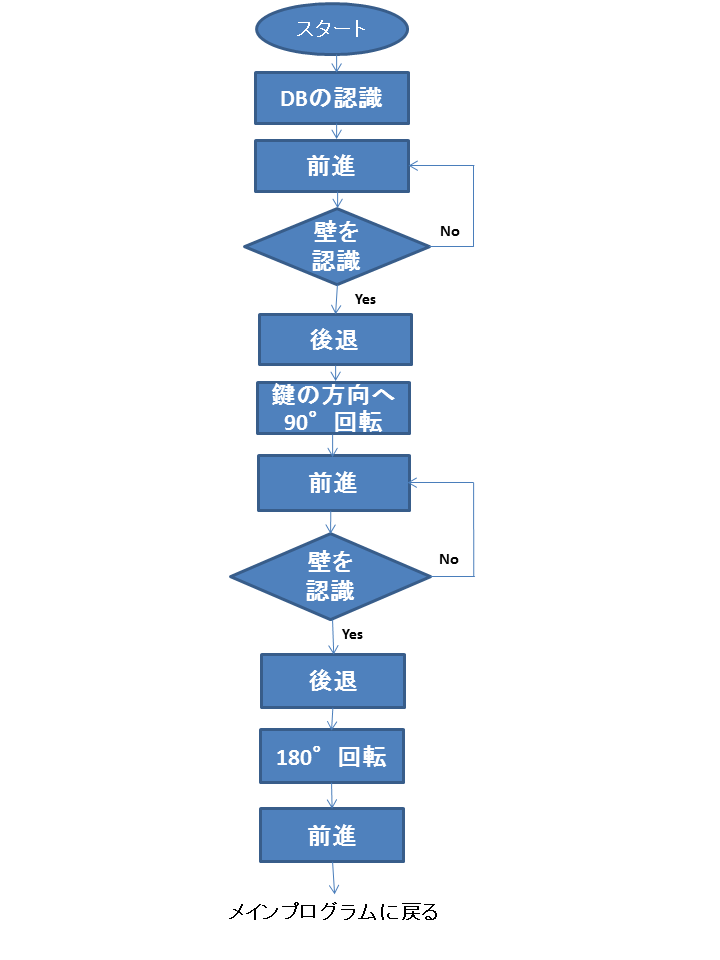
二回行われる壁認識はMIRS正面にあるタッチセンサにより行う。また、二回目の壁認識は鍵を開けたかどうかという判断の意味である。
前進などの通路走行はまずテストプログラムをそのまま使用して行う予定である。
開発スケジュールに余裕があれば超音波センサを使用した走行制御を行う。
5.開発スケジュール
| 10/22 | 10/26 | 10/29 | 11/2 | |
|---|---|---|---|---|
| ソフト | 開発 | 開発 テスト |
統合 | 最終調整 |
| メカ・エレキ | 機体修正 オリジナルマシン設計予定 |
|||
-
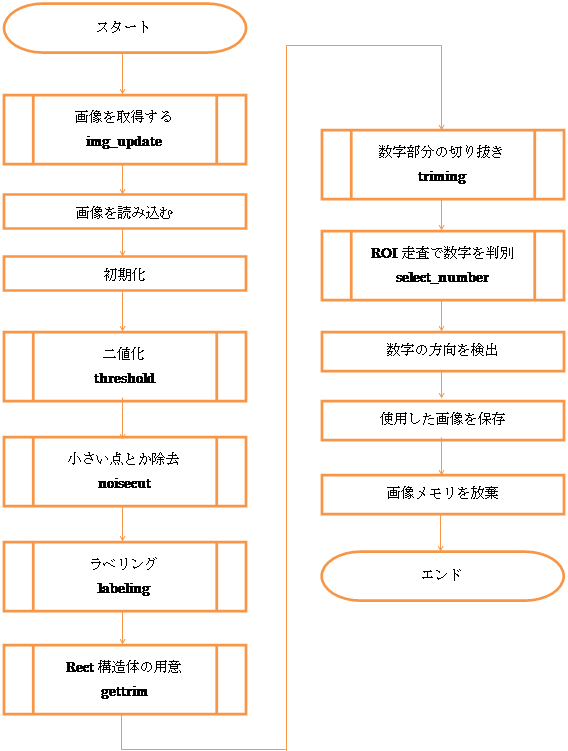
前川 :数字認識、main関数
秋山 :ロータリー
伊與田:小部屋
木村 :鍵・扉
6.ソフト担当
沼津工業高等専門学校 電子制御工学科