| 名称 |
MIRS1202 システム提案書 |
| 番号 |
MIRS1202-DSGN-0001 |
最終更新日:2012.11.16
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2012.11.16 |
二見、秋山 |
|
初版 |
目次
1.はじめに
-
本ドキュメントは、MIRS競技会に向けたシステム提案に関するドキュメントである。
2.システム概要
~ユニーク~
- ユニークなmirs機作成のために、それぞれメカ、エレキ、ソフトの標準機からの変更点について、表にして以下に示す。
|
改良点
| 現状 |
変更後 |
| メカ |
スピーカー |
なし |
新規取付 |
| サスペンション |
走行不能状態が起きるため |
新規取付 |
| ボールキャスター |
ステップ、段差で引っかかるため |
従来のものよりも大きいものを取り付ける |
| ジャイロセンサ |
なし |
新規取付 |
| エレキ |
スピーカー |
なし |
ドータボードで、空いているポートに新規取付 |
| 電子コンパス |
なし |
上記と同じ |
| ソフト |
画像処理 |
なし |
超音波センサに替わって、コース情報の取得 |
| マルチスレッド |
なし |
データ取得周期を縮めるため |
- 次にメカ、エレキ、ソフト分野の詳しい説明を下記にて述べる。
- 2.1 エレキ
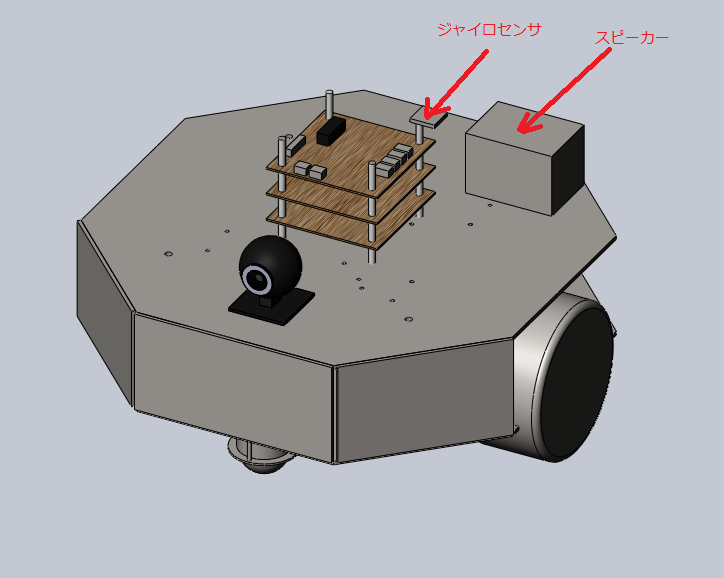
- ・スピーカー
→MIRS機が現在どのような行動を行っているのか、音声で確認するために取り付ける。 また他にパフォーマンスとして、プレ競技会で観客の人にもわかりやす理解してもらうためである。
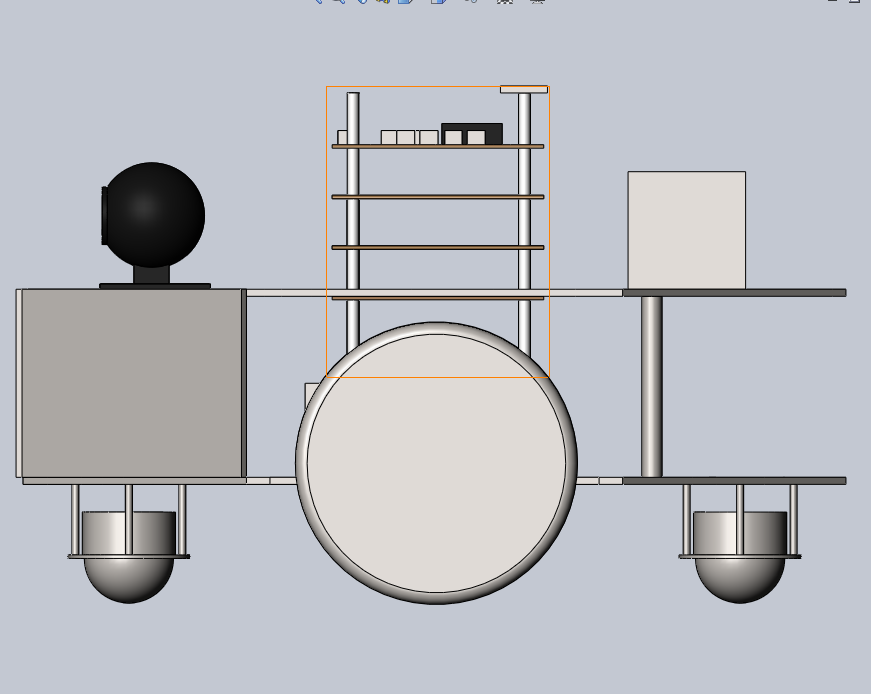
- ・サスペンション
→シーソーや段差での走行不能状態を作らないためである。試走させた際に空回りしてしまったことと、MIRS機が衝撃によって異常事態が起きてしまうことから、取り付けを考えた。
- ・ボールキャスター
→上記で述べたサスペンションと同じであるが、ボールキャスターのサイズを大きくしてシーソーや段差での走行不能状態を作らないためである。こちらでは、そもそもに前輪と後輪のボールの直径が小さいために引っかかってしまっているので、ボールキャスター自体のサイズを大きいものに取り換えればよいと考えた。
- ・ジャイロセンサ
→正体補正を綺麗に行い、迷路をスムーズに脱出するために取り付ける。高専祭では壁に当たることが多くあり、そこからの生体補正に時間がかかってしまうことや、予期しない場所に進んでしまうのを防ぐためである。
- 2.2 メカ
- ・スピーカー
→スピーカーは個人で自作で作成する。MIRS機に空いているポートがあるので、そのポートを使用するためにオリジナル基板を作成する。
- ・ジャイロセンサ
→ジャイロセンサ自体は購入を考えていて、そのためにオリジナル基板を作成する。
- 2.3 ソフトウェア
- ・画像処理
→数字認識プログラムには、MIRS0901班の数字認識プログラムを改良したものを使用する。画像処理については他にも、ロータリーや小部屋の攻略の際に、その出口を探したりするのにも用いる。
- ・マルチスレッド
→センサ類のデータ取得周期を小さくする為、またシングルスレッドよりもプログラムの構造をわかりやすくすることができると考えた為、マルチスレッドでのプログラミングを採用することにした。
3.MIRS機の外観
-
4.コース攻略方針
-
直進動作では、余計な正対補正などをせずともゴールはできるので、なるべく速く走行していくことを目指す。
復帰動作、数字認識、各仕掛けの攻略などにおいては、それに失敗して走行を中断しなければいけないくなることがあり得るので、堅実に攻略できるようにしていく。
沼津工業高等専門学校 電子制御工学科