| 動作 | 試験内容 | 結果 | 完了日 | 担当 |
|---|---|---|---|---|
| 走行制御 | 直進走行、旋回走行、回転走行の動作を確認する | 走行制御試験結果 | 8/9 | 大塩 |
| 数字認識 | 二つある数字をそれぞれ認識するか確認する | 数字認識試験結果 参考ページ MIRSMG3D 数字認識プログラム(2数字版) |
10/3 | 清水 |
| コース | 確認基準 | 試験内容結果 | 実施日 | 担当 |
|---|---|---|---|---|
| T字路 | T字路の走行ができるかを確認し、できなかったのであれば今後の参考とする | T字路走行内容・結果 フローチャート |
8/11 | 鈴木 |
| ロータリー | ロータリーの走行ができるかを確認し、できなかったのであれば今後の参考とする | ロータリー走行内容・結果 | 8/11 | 平柳 |
motor_test.cを用いて「直進」「回転」「旋回」の3動作試験を行った。
※2012年10月5日現在、右モータに障害のため、正確なデータを採ることができなくなっている。 後日、モータの問題を解決したのち詳細なデータを調査、記入しておくこととする。
走行制御試験で機体の初期位置と向きを図に示す。(Fig.走行制御1)
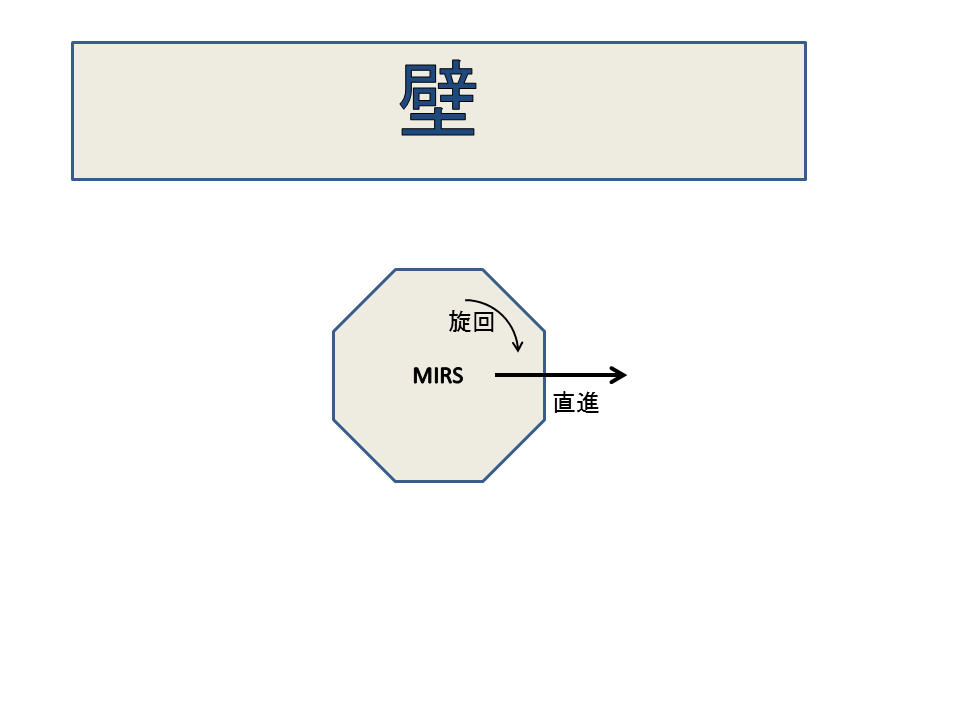
(Fig.走行制御1)
・直進
「走行距離(mm)」と「それに所要する時間(ms)」をそれぞれ指定し、直進させる。
1000mmを10000msの低速走行をさせると、直進→停止が正常に動作する。
→しかし、1000mmを2000msで走行させると、停止せずに永遠にモータが回り続けてしまう。
・回転
「角度(deg)」と「時間(ms)」をそれぞれ指定し、回転させる。
目視で確認しやすい90°や180°で動作を確認した。壁や長い棒を使って角度の基準として計測した。
基本的に正確に動作したが、10回につき1~2回の割合で微妙なズレが生じた。
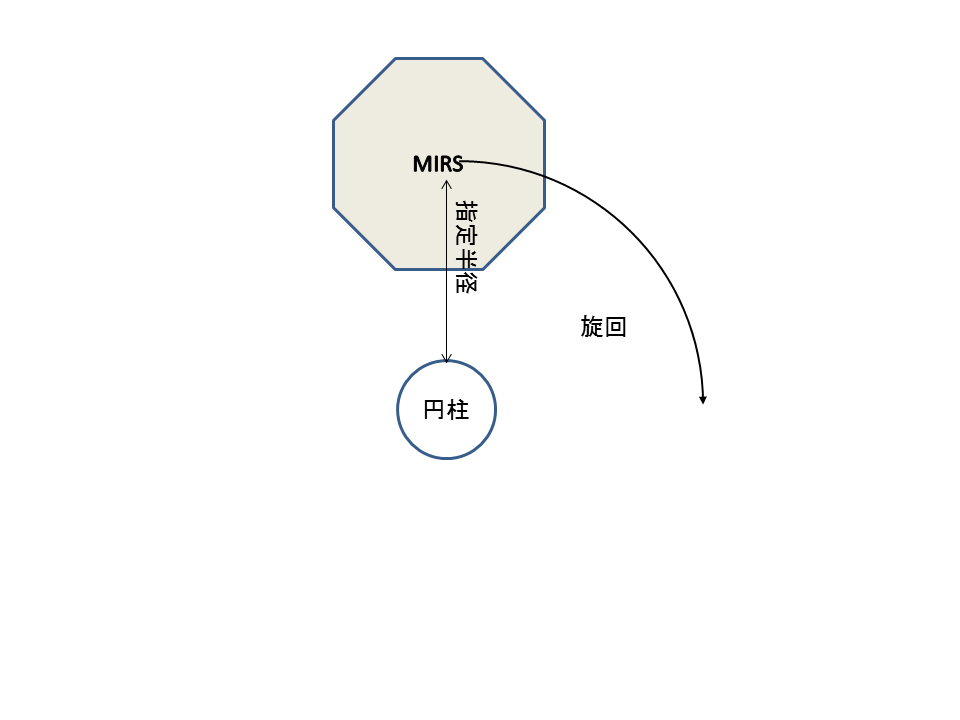
・旋回
「角度(deg)」「半径(mm)」「時間(ms)」をそれぞれ指定し、旋回させる。
直進時に起きる不具合がここでも生じるが、それさえ考慮すれば指定値通りの動作をする。
4.2.1試験内容
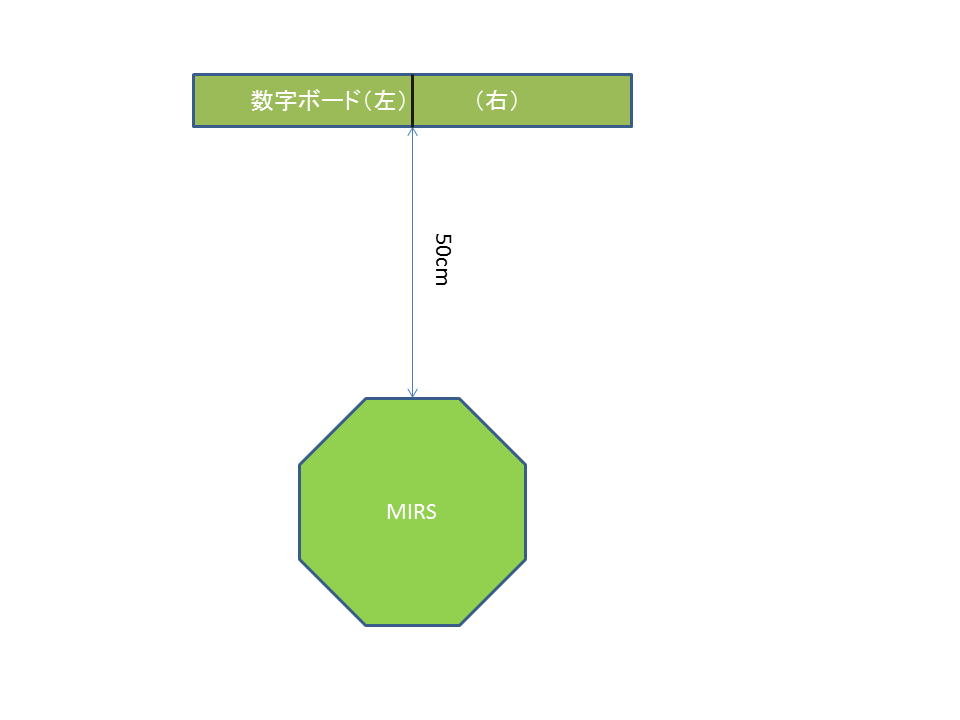
ダイレクションボードとMIRSの距離を50cmにし、正面からボードを見れるように置いて、数字を読み取る。
数字認識試験で機体の初期位置と向きを図に示す。(Fig.数字認識)
4.2.2結果
二つある数字をそれぞれ認識することに成功した。
4.2.3作業内容
数字認識プログラムは一日体験入学の時、一つの数字しか認識できていなかった。これは、もともと標準プログラムパッケージに入っている数字認識プログラムが一つだけ読むものとなっていたからでした。そこで、数字認識プログラム(2数字版)にあるnum_detect2.cを置き、数字認識プログラム(2数字版)の手順に従って導入することにより、数字を二つ認識することに成功しました。
4.2.4問題点について
既知の問題として、「取得した画像を中央で単純に2分割しているだけなので、ボードが画像の中心からずれて、 2分割した際に片方の数字の一部が欠けてしまうと、その数字が認識できない可能性が高い。」というものがあり、これについては正対補正や、画像の分割の仕方を変えるなどの対応策を考え、解決を目指します。 原因は不明ですが、特定の数字を誤認識することが、10回に1回くらいの頻度で起きてしまっているので、それが起きないよう対策を考えて誤認識をなくしたいです。 誤認識の例:7を4と読んでしまった。2を8と読んでしまった。
4.3 T字路
4.3.1 試験目的
今回の試験 (プログラム制作)を今後のプログラム制作の参考にする。
MIRSの各関数の用途、使用法の把握、運用技術の向上。
攻略プログラムの大まかな構造の考案。
4.3.2 結果
白線検知、画像処理動作は省略して試験を行った。2,3回走行方向を手で調整(2回の長距離直進それぞれ1,2回ずつ)したが、スタートからゴールまで一連の流れを確認できた。
4.3.3 工夫点
・最後のゴール以外、距離による判定は用いなかった。距離による判定は、他に応用が利きにくく今回の試験の方針に反しているため。 ・フロー形式でプログラムを構築し、わかりやすく、より簡潔になるように努めた。 ・タッチセンサの試験プログラムを改良し、特定の1箇所の値を読み取る関数を作成した。
4.3.4 改善点
・センサ類は本番ではタッチセンサのみ、開発中は超音波センサとタッチセンサのみしか使用しなかったので、白線検知、画像処理、細かな補正処理ができない。 制作時間が約1日間と短かったため、今回は白線検知と画像処理は省略した。 白線検知を、代わりに超音波センサで前の壁(数字ボード)との距離を検知し止まることにし(最終的プログラムからは省略)、画像処理後の動作の代わりは数字ボードへの前タッチセンサの接触判定とした。
・各処理(走行、補正、回転)がFeedfowardとなっているので、正確でない。
・マルチスレッドを使っていないため、割り込み処理ができなくセンサのリアルタイム値をとり続けられない。
4.4 ロータリー
4.4.1ロータリー試験内容
ロータリー走行試験で機体の初期位置と向きを図に示す。(Fig.ロータリ走行)
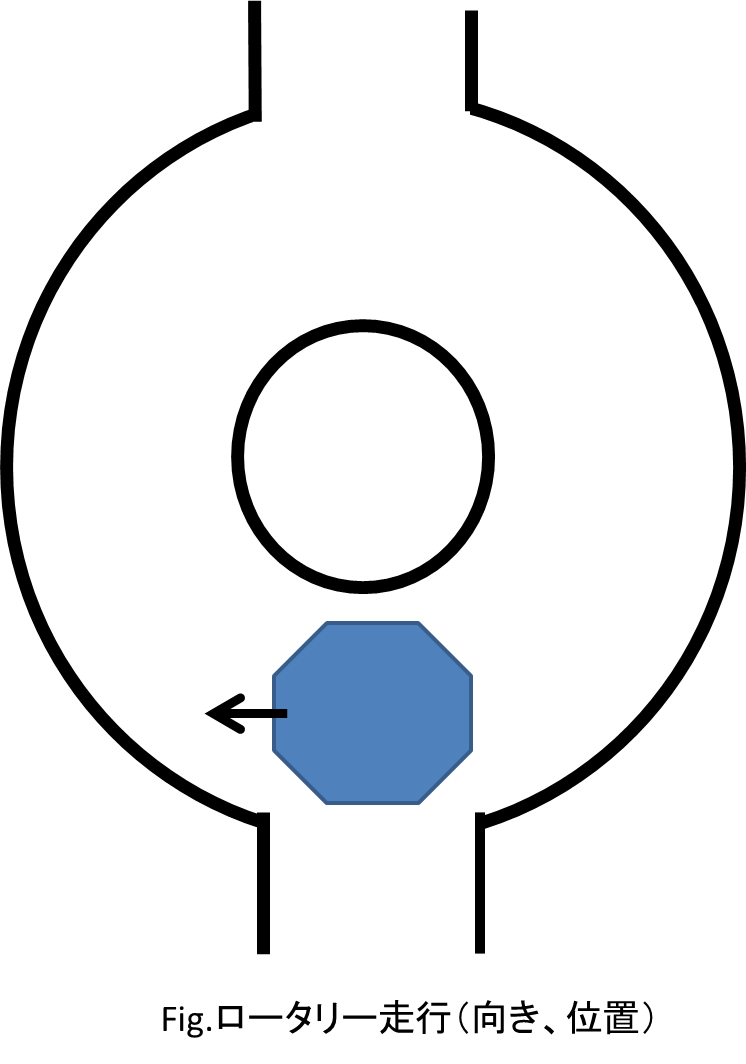
走行試験で用いた旋回プログラムを用いて旋回角360°,旋回時間5000ms,旋回半径180mmとパラメータを設定して動作させた。
4.4.2結果
機体はロータリーを1周は走行できたが2,3周走行させると壁にぶつかり旋回できなくなるという結果になった。
4.4.3考察
デフォルトのプログラムではロータリー走行を実現することができた。MIRS1201はT字路攻略のプログラムを改良してタッチセンサを使ったロータリー攻略のプログラム作成を試みたが時間がなくて失敗してしまった。本番では超音波センサを使ったロータリー攻略である。また、ロータリー走行での最善の走行スピードは追々、測定していくつもりである。