4.動作仕様
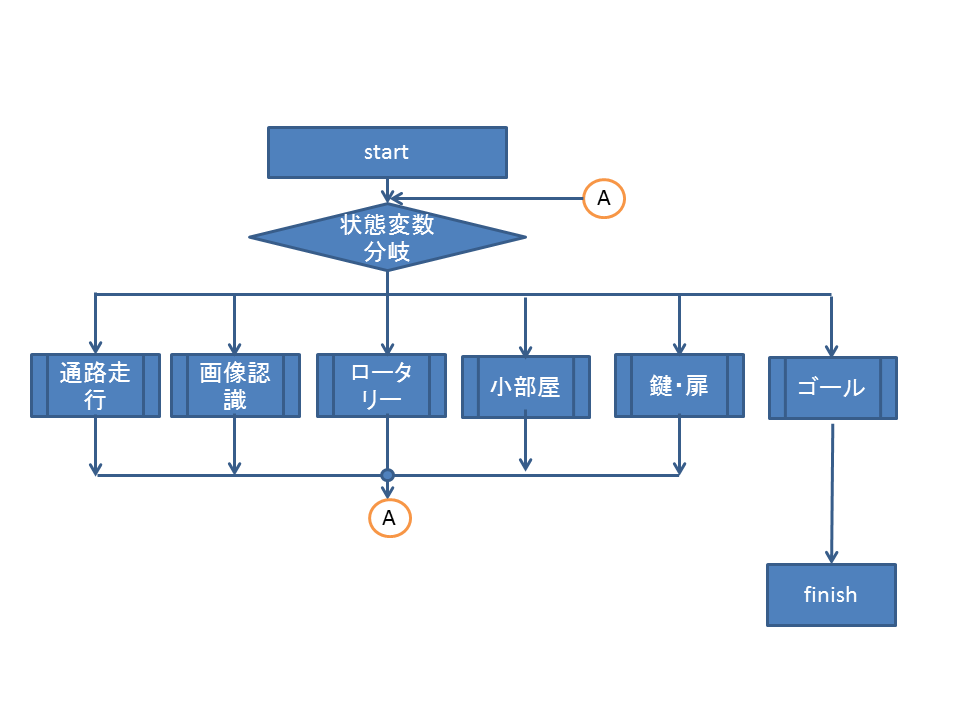
- プログラムのフローチャートと簡単な動作説明を以下に示す。MIRS1201は、各機能をモジュール化して必要に応じて呼び出す形式を取る。各機能の動作の流れは機能定義、詳細設計で示す。
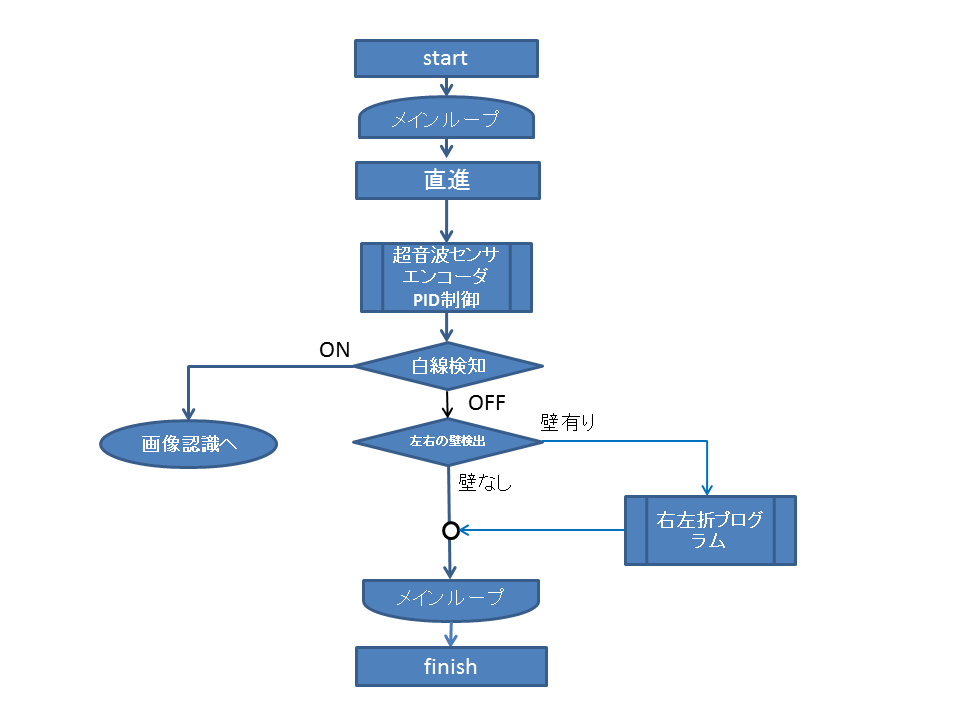
- 超音波センサを用いてT字路、曲がり角、行き止まりを検知する。
- 直進の場合、超音波センサやロータリーエンコーダなどを使用し、壁に接触しないように走行する。
- 曲がり角の場合、その場で90°回転し走行する。
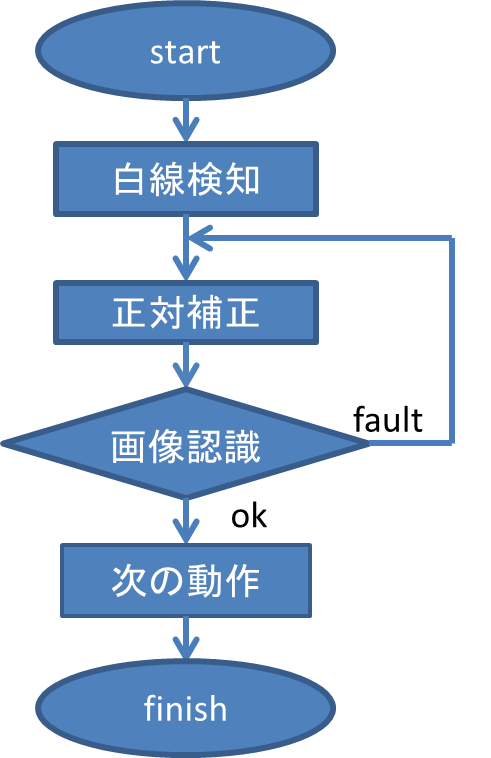
- 白線センサで白線を検知する。
- 画像を正確に取得するために正対補正を行う。
- 画像の取得を行い、それをもとに数字認識処理を行う。
- 数字認識に成功した場合、処理5へ移行。数字認識に失敗した場合、処理2へ移動。
- 設定してある優先度に従い、攻略する仕掛けを選択し通路動作に移行する。
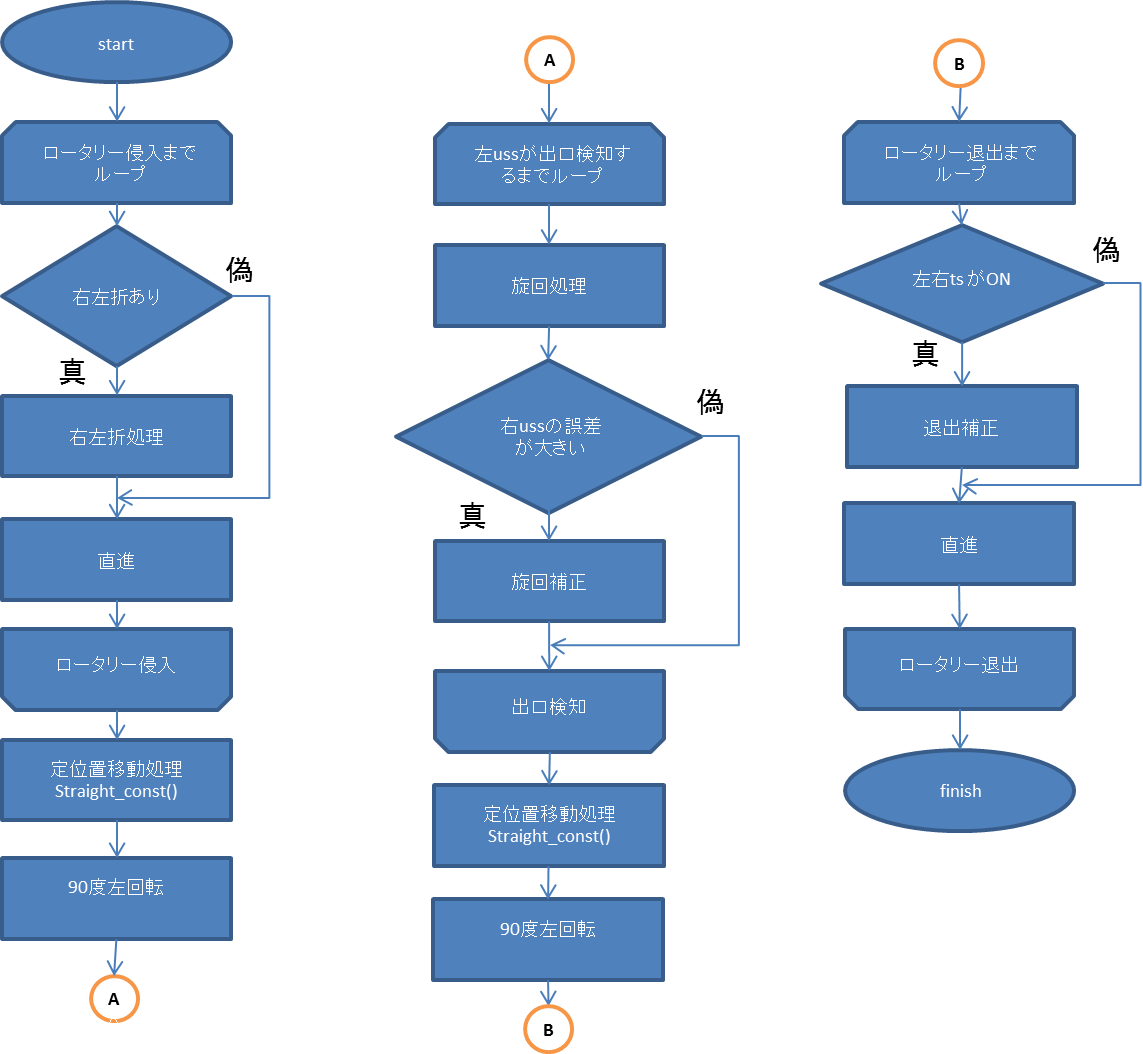
- Direction Boardで識別後、ロータリーに侵入したことを左右の超音波センサで判断する。
- ロータリーに侵入後、通路の中央まで直進し、その場で90°回転する。
- 設定した回転半径で走行させる。また、右センサで行き過ぎ誤差を修正する。
- 壁検知後、再び左の超音波センサがエラー(出口)になるまで走行する。
- 出口検知後、出口後の通路の真ん中に補正
- 出口に向けて90度回転する
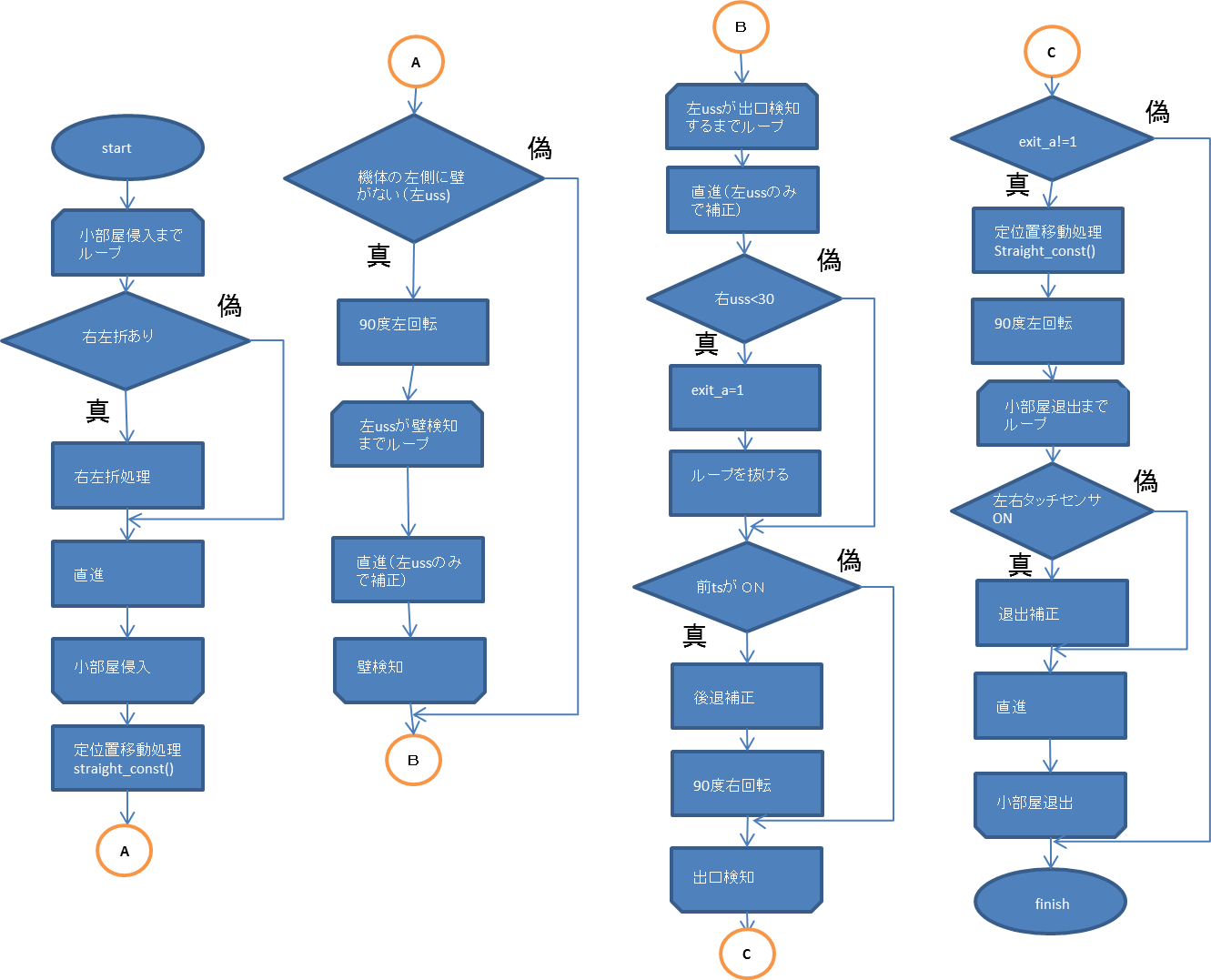
- Direction Boardで識別後、小部屋に侵入したことを超音波センサで判断する。
- 左の壁伝いで、出口を探しながら走行する。
- 見つけたら出る or 前方のタッチセンサに反応があれば90°回転して再度探索する。
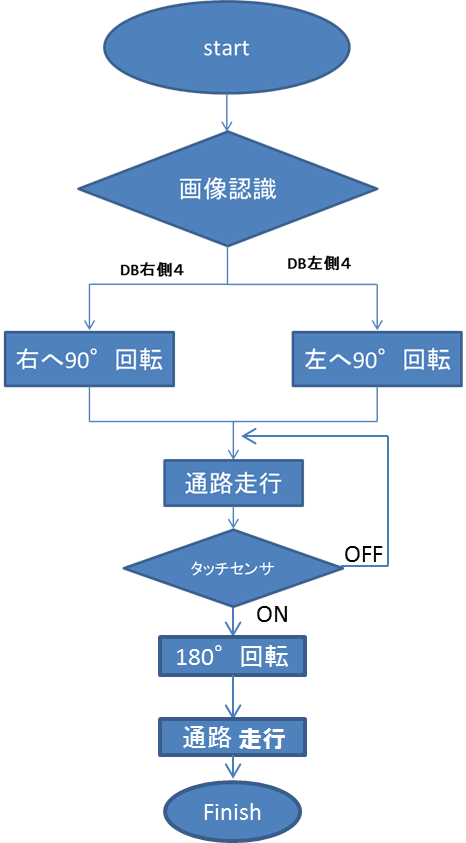
- Direction Boardで識別後、鍵の方向へ90度回転し、鍵まで直進。
- 壁に衝突し扉をあける。この時タッチセンサが押される。
- 180度回転し、扉を通過し、次の動作へ移行する。