最終更新日:2012.2.6
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2012.2.6 | 片山 | 高木 | 初版 |
| A02 | 2012.2.17 | 高木 | 高木 | 第2版 |
| A02 | 2012.2.27 | 高木 | 高木 | 最終更新 |
目次
-
本ドキュメントは、MIRS1105のMIRS開発の分析と総括をまとめたものである。
1.はじめに
-
前期開発スケジュール
後期開発スケジュール
超音波センサの不具合が多く、予想以上に手間取ってしまった.プログラムはデバック・改善の時間が少なすぎた.
2.開発スケジュール分析
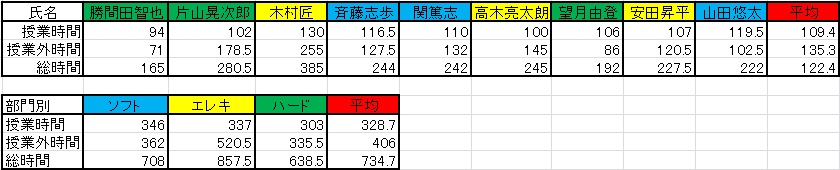
{kind=link}
- 上に開発工数分析を示す。上の表を個人、下の表を部門別とする。
3.開発工数分析
-
MIRS開発全体を振り返って、全体およびパート毎にうまくいった点、うまくいかなった点、その原因などを総括する。
- 全体(マネージャ)
担当:片山
競技会で良い成果を残すことが出来ず、非常に悔しい結果となったが、各人得るものがあったと思う。
ただ一年を通して、それぞれの負担が平等でなかったように思える。特別なスキルの必要なセクションはともかくとして、時間とやる気さえあれば誰でも出来るような仕事があっても仕事をしていないメンバーもいた。マネージャーとして全員に平等に仕事が行き渡るように取り計らうことが出来ず、ふがいない思いだった。
MIRS1105で新たに導入したLCDや統合ドータボード、プーリーの新機構は今後のMIRS標準機にも採用できる品質のものだったと自負している。来年度以降MIRSに取り組むD科生が、我が班のMIRSの良い点も悪い点も参考にして、成果を残してくれれば祈るばかりである。(MIRS1105.Manager 片山)
- メカ
担当:勝間田・山田
メカ総括 メカ全体としてもう少し、早くメカの完成ができたらと後悔しています。 シャーシのデザインはコンセプトをもとに標準の形から削りあの形となりましたが、キャスターのサスペンションのことを後回しにした結果が今回の一番の問題だったと考えています。また、シャーシの加工も穴あけの加工や配線のことなどシャーシ完成後も様々な問題が出てきたのでそのあたりももう少し考えられていたら開発ももう少し楽であったなどと反省しています。 自身としてはPCの画面上で設計した図面も実際に自身の手で加工するときと大きく異なることを学んだことが一番大きかったです。 この総括から来年度以降のD科生がメカの設計に役立ててくれればと思います。
- エレキ
担当:木村
今回エレキ班が手を加えたのは 1,状態表示LCDボードの追加 2,超音波センサの追加 3,改良ドータボードの製作、搭載 の3点のみであり、寧ろMIRSの保守管理に注力する場面が多かった。 それ故、MIRSプロジェクトの達成すべき『新技術への挑戦』という目標の達成は不十分であったように思う。 ただ、MIRSを構成する全ての要素は『手作り』であるため、それを競技会まで『動く』状態に保守する存在は重要である。そういった意味で、班に尽力し貢献したと自負している。 また、今回新たに製作した機器(LCDやドータボード)について、できる限り分かりやすい資料を残し、次年度以降の担当者が継続して使えるようにすることがサブテーマであった。このテーマについては概ね達成できたと思う。 次年度以降の人には是非、今年作ったものを使い続けてもらいたい。 MCBチームの活躍も相成って、エレキ最大の問題である配線回りのトラブルは解決しつつある。今後は、加速度センサやジャイロセンサといった新しいシステムを積極的に取り入れ、エレキの技術的革新を目指してほしい。
- ソフト
担当:片山・関
プログラム全体として、並列走行するスレッドの肥大化が問題だった。デバイスへの多重アクセスやリソースビジーなどのエラーの原因になり、デバックに時間をとられた。ただ皮肉なことに、自身にとっては大変トラブルシューティングの勉強になった。
走行制御の面では、PICプログラムのゲイン調整が出来ていなかったことがまず問題としてあげられる。標準のテスト関数(motor_start)にエンコーダ値の取得をさせると、標準のゲインでは機体との相性もあってか入力通りの回転速度が直ちに得られなかった。PICプログラムのPゲイン・Iゲインの調整次第では改善しうる問題だったと思われるので、時間を捻出して対処すべきだった。
また上述のゲイン調整を行うにしても行わないにしても、上位構造で実際の走行量や通路の側壁との相対位置を監視し速度入力へのフィードバックを行うプログラムを作る必要があった。競技会で使ったプログラムでは、ロータリーエンコーダのround値からの比例フィードバックのみで成魚を行っていたため、走行距離が短い場合には特に期待していた成果が得られなかった。ロータリーエンコーダ値でのPD制御及び側方の超音波センサを用いて直進の補正を行うべきだった。(MIRS1105.Soft.subchief 片山)
最後のほうは時間ぎりぎりとなってしまい、プログラムは完成したが、デバッグの時間がなかった。
しかし、制御の仕方、C言語、大きなプログラムを作成する工程を学ぶことができた。
ソフトでは、画像認識プログラム、駆動系プログラム、各障害突破プログラムと、それぞれを統合するためのメインプログラムを作成した。(MIRS1105.Soft.chief 関)
- MCD
担当:安田
支給されたMIRSの「モーター制御ボード」に関して、不備が見当たらず通常通り動作していた。 新MCBの導入を検討したが、時間が無く(MCBの制作には時間がかかる)断念した。 これが、競技会当日に苦しめられた「I/Oエラー」の原因の1つである。 「I/Oエラー」は、配線面を改善することで解決することができる。そのため、コース攻略には新MCBの導入は急務であった。 もし、新MCBを導入していれば・・・。 感想
- 全体(マネージャ)
担当:片山
4.総括
-
個人の感想を記す。
- 勝間田智也
- 片山晃次郎
- 木村匠
- 斉藤志歩
- 関 篤志
- 高木亮太朗
- 望月由登
- 安田昇平
- 山田悠太
メカ班としてMIRSのメカに少し時間を掛け過ぎてしまいました。
メカとして、シャーシの寸法を取りシャーシの加工や穴あけなどし、MIRSを組み立てました。
MIRSを組み立てるときに、エレキが配線しやすいような組み立て方をしました。また、上段、中段、下段のグラつき防止のために、ワッシャーをはさんだり、スペーサーを噛ませてねじをきつくしめ対応しました。
感想、1年間通してメカ班では楽しくMIRSに取り掛かることができ、自分でも貴重な体験ができたと思います。
競技会で良い成果を残すことが出来ず、非常に悔しい結果となったが、各人得るものがあったと思う。
ただ一年を通して、それぞれの負担が平等でなかったように思える。特別なスキルの必要なセクションはともかくとして、時間とやる気さえあれば誰でも出来るような仕事があっても仕事をしていないメンバーもいた。マネージャーとして全員に平等に仕事が行き渡るように取り計らうことが出来ず、ふがいない思いだった。
MIRS1105で新たに導入したLCDや統合ドータボード、プーリーの新機構は今後のMIRS標準機にも採用できる品質のものだったと自負している。来年度以降MIRSに取り組むD科生が、我が班のMIRSの良い点も悪い点も参考にして、成果を残してくれれば祈るばかりである。(MIRS1105.Mng 片山)
今年一年、エレキを担当しながら班の活動の全般に関わらせてもらいました。一年を振り返ってみて感じるのは、新しい技術への挑戦が少なかったということです。 主にMIRSの保守管理がメインになってしまっていて、新技術にチャレンジすることができませんでした。もっと早くから行動を起こしていれば…。PSEyeが使えなかったのが一番悔しかった。 ただ、『本番当日まで動く機体を提供する』という、当初自分の中に掲げた課題は概ねクリアすることが出来たのでよかったです。 またほかに反省点として、もっとソフトウェアに積極的に関与しておけばよかったと感じています。最終的にMIRSに求められるのはやはりソフトウェアです。最後の最後で、班の力になることが出来ず、悔しい思いをすることになってしまいました。 色々思い返してみると、悔かったり、やり残したことも多々あるけれど、それでも班員、あるいはクラスの連中と徹夜してうどん食ってデスマーチして、本当に楽しかったです。こんな経験もう味わえないだろうから、今年一年の経験を大切にしていきたいです。
私はMIRSでソフトを担当した。
主に関のサポートとして作業をしていた。しかし、あまりソフトに関わることができなかった。だから、みんなの様子を見な がら、自分が今できることを探した。もちろんソフトの方も。小部屋の大まかなプログラム・超音波センサの作成・調整・バッ テリーチェックetc.最後の方はなりふり構わずなんでもやった気がする。自分が少しでもMIRS1105に貢献できたらと思って。力 のない自分でも頑張ってるみんなのために作業をした。
また、MIRSによって私の周りだけかもしれないが、クラスの仲が深まったと思う。みんなで苦しんで、笑って、体調崩して... 最後のMIRS外泊はきつかったけど、なんだかんだ楽しくていい思い出になった。
最後のほうは時間ぎりぎりとなってしまい、プログラムは完成したが、デバッグの時間がなかった。 しかし、制御の仕方、C言語、大きなプログラムを作成する工程を学ぶことができた。 ソフトでは、画像認識プログラム、駆動系プログラム、各障害突破プログラムと、それぞれを統合するためのメインプログラムを作成した。
私はMIRS1105では、エレキとして関わりました。
エレキとしては、センサ系のよく不具合が起こったので、デバック、修理にとても時間がかかりました。
その他に、LCDボードを作成するのにも携わることができました。
この問題ばかりの機体が、回路的な面でも、技術的な面でも更に成長させてくれたと思います。
また、エレキということでしたが、ハードの問題も一緒に解決していく中で、エレキとハードと連動した対策を導くことができました。
社会に出たら、このようなチームワークを大切にする、開発環境疑似体験はとても役に立つと心から思います。
5年生になってからは、自分ができることはとことんこだわって吸収していきたいと思います。
結果は残念でしたが、この頑張った思い出は一生物であるとともに、これからの人生の支えの一つになると思いました。一年間ありがとうございました。
一年間を振り返って競技会とチームの往復でどっちつかずな感じで終わってしまったのが少しもったいない気がした。競技会チームでは、主に司会や当日の準備などでしか活発的には動けていなかったが、これまでに関わることのない人と関われて、新鮮な感じがした。また、5班では少しだけメカに関わって、MIRSの外見について知ることができたと思う。次回このような機会があったら、次は製作に携わってみたいです。
クラスの皆の優秀さには驚かされるばかりでした。 作業時間の最中は、チームの迷惑にならないようにするだけで精一杯だったのが正直です。 しかし、MIRSを通じて「導通チェック」「配線づくり」など基本作業を繰り返すことで「忍耐力」や「集中力」が向上したように感じます。 競技会では、チームの悔しがる姿を見て「ドンマイ」と言うこともできない自分に何とも言えない気持ちでした。 もっと、真剣に取り組んでいれば・・と・・。 この経験はきっと将来生かせると信じ、終わるのは寂しいですが、ここで僕のMIRSを終えたいと思います。 チーム(特にコジロー・キム・関さん)には、「お世話になりました」と言いたいです。
MIRSのソフト担当でした。 しかし、主にメカのほうの作業をしていました。SolidWorksを用いて標準機からMIRS1105のオリジナルの機体の設計を行いました。オリジナル機体の全体図からシャーシの設計図を行い図面作成・加工を行いました。使い方のよくわからない状態から始めて設計を行い、完成した達成感は忘れません。 いろいろやるなか、ロボットを作るということの大変さがあるものの、仲間と協力して悩んで笑って一つのことをやるという大変貴重な経験ができました。
5.感想
沼津工業高等専門学校 電子制御工学科