| 名称 |
MIRS1105 システム開発計画書 |
| 番号 |
MIRS1105-PLAN-0003 |
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2011.7.8 |
関篤志 片山晃次郎 |
NULL |
初版 |
| A02 |
2011.7.15 |
関篤志 片山晃次郎 |
--- |
誤字の訂正、並列動作の検討の変更、テスト仕様の変更、開発行程表の変更 |
目次
1. 行動戦略
仕掛けを確実に突破し、確実に得点を稼ぐことを目標とする。DBでの数字認識から各種仕掛けへ進む際に、難易度の低い仕掛けの優先度を高くする。
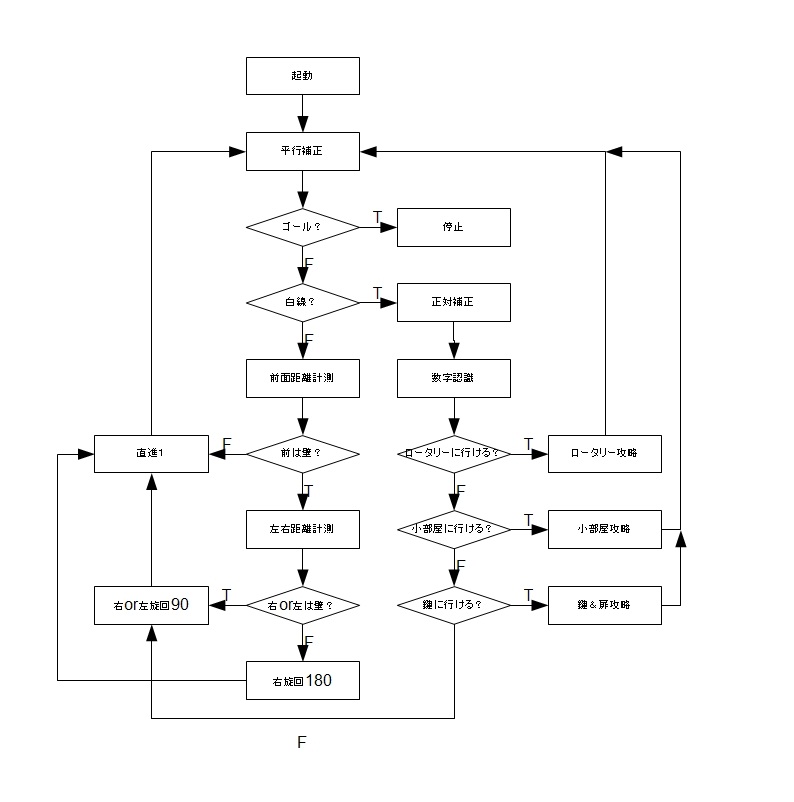
2. 動作仕様
全体動作レベルのフローチャートを以下に示す。
並列動作の検討
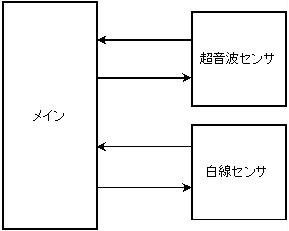
超音波センサを用いた距離測定、及び白線の探知をしながら走行する。
状態遷移図
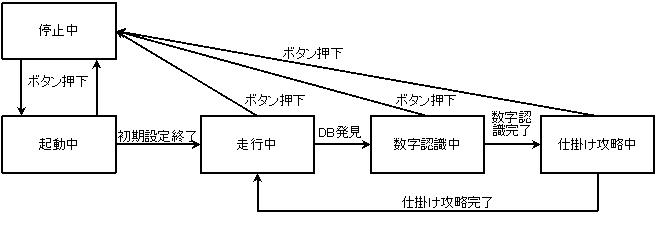
・停止中 : 電源OFF、何もしていない状態。
・起動中 : 電源ONした直後、初期設定を行う。
・走行中 : DBを探しながら、通路走行をする。
・画像認識中 : USBカメラによってDBの数字を認識する。
・仕掛け攻略中 : あらかじめ設定した優先順序によって、仕掛けへ進み攻略する。
3. 機能定義
動作実現の為、以下のような単体機能を定義する。
・数字認識
DBの数字を認識し、難易度が低い方の仕掛けをクリアする。
・正対補正
DBの数字を認識するために、USBカメラがDBへ距離60cm程度の位置で正対した状態になる。
・平行補正
機体の横幅がおよそ40cmなのに対し、コースの幅が50cmと狭い。その為、コースの中心を通りかつ壁と平行に走行が必要となる。この機能ではそれを実現する。
・各種仕掛けのクリア
扉・鍵、ロータリー、小部屋といった仕掛けを確実に突破する。
4. テスト仕様
4.1 定義した各種機能のテスト
●数字認識
・認識率について
50回数字を認識し、かつ認識率が90%以上である。
・認識速度について
20秒以内に数字を認識する。
●正対補正
・補正の精度について
正対補正完了後の機体準線と白線との角度差が5°以内である。
正対補正完了後のカメラとDBの距離が55cm~65cmの間である。
・補正完了までの時間について
10秒以内に正対補正を終え、機体が静止する。
●平行補正
幅50cm,距離5mの直線を壁に接触せずに走行できる。
4.2 総合テスト
以上の各種テストが完了した後、これらの機能を組み合わせて総合的な試験を行う。
・正対補正後の処理
正対補正によって、DBとUSBカメラとの位置と向きが適切になった後、数字認識へ移りその数字認識は正常に行われる。
・数字認識後の処理
DBの数字を認識し、優先度の高い仕掛けへ向けて機体が走行する。
・全体の動作
標準機をスタート地点からスタートさせ、コースをクリアできる。
5. 開発計画
以下に開発行程表を示す。

沼津工業高等専門学校 電子制御工学科