最終更新日:2012.2.6
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2012.2.6 | 野澤 | 勝又 | 初版 |
目次
-
本ドキュメントは、MIRS1104のMIRS開発の分析と総括をまとめたものである。
1.はじめに
-
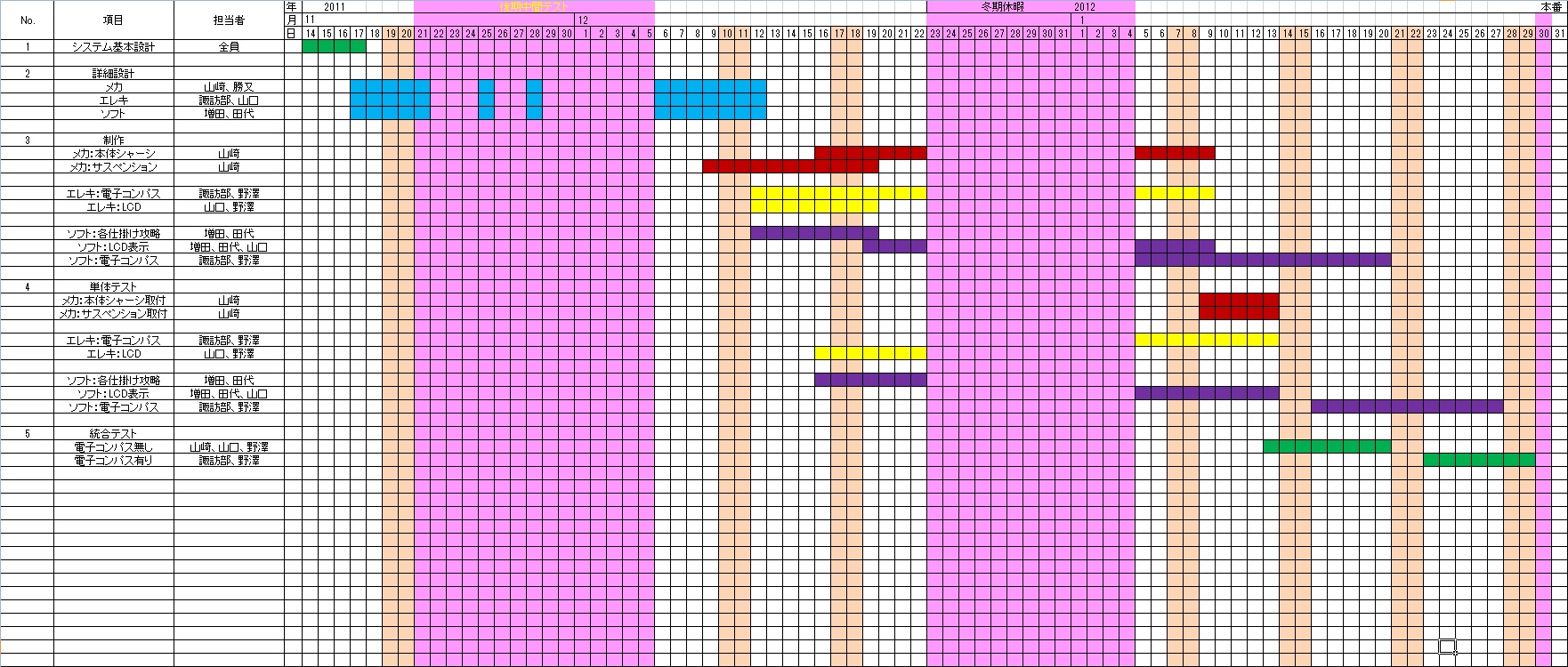
図,1, 開発スケジュール予定
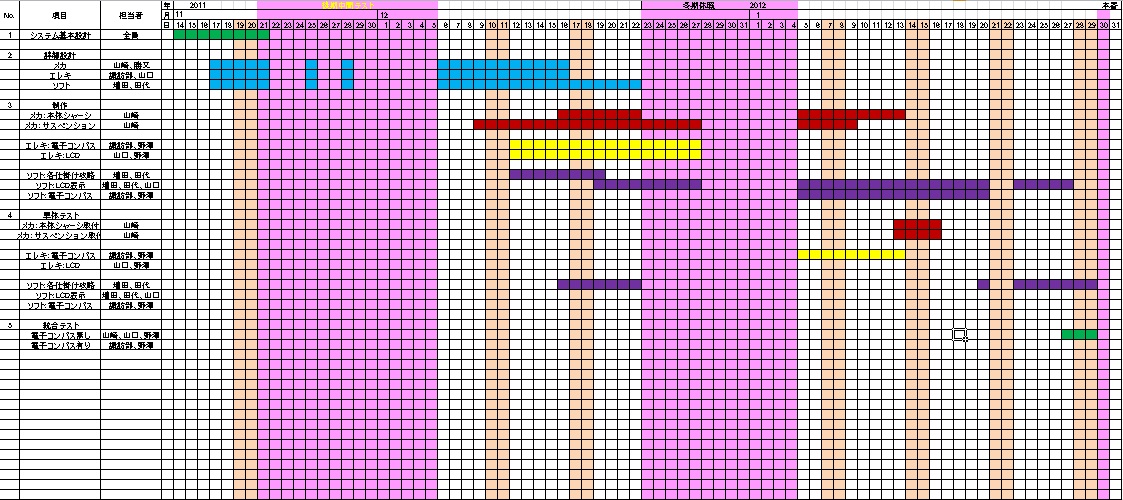
図,2, 開発スケジュール結果
スケジュールでは、エレキの組み込みの期間を予想でとってしまったため組み込みの期間が予想以上に伸びた時に対応が遅れてしまった。最終的に統合テストは新しい回路なしの状態で行うことになってしまった。なので、組み込みのスケジュールを組む時はあらかじめ組み込めるかどうかの見立てを立てる必要があったと感じた。
2.開発スケジュール分析
-
・工数分析担当 班員名 作業時間[h] 備考 マネージャー 野澤雅利 267.5 MIRS1104-WORK-0005 競技会プロジェクト 伊藤彩花 294.6 MIRS1104-WORK-0001 ドキュメントマネージャー/メカ/バッテリー班 勝又健 169.5 MIRS1104-WORK-0002 メカ 山崎陽平 150.5 MIRS1104-WORK-0008 エレキ 諏訪部純 160.5 MIRS1104-WORK-0003 エレキ 山口啓太 172 MIRS11XX-WORK-0007 ソフト 増田圭祐 190.5 MIRS1104-WORK-0006 ソフト/MCBプロジェクト 田代 純也 207.5 MIRS1104-WORK-0004
メカ・エレキはソフトに比べ、やはり少し作業時間が短いがそれは作ったものに時間をかけていないかというとそうではなく、ソフトがデバック作業に時間をかけなければならないからである。そういう意味では、比較的短期間でメカ・エレキの設計、製作過程を終えられていたので上出来だと考える。
3.開発工数分析
-
- 全体(マネージャ):
全体として思ったことは、それぞれの分野では特に問題なかったがそのつなぎの部分では一部問題があった。そのせいで時間が取られ実現できない機能があったのが残念だった。 - メカ:
シャーシについて
もともと円形のシャーシを予定していたが、ワイヤーカット放電加工のために元の円形に外接する八角形へと形状を変更した。しかし、標準機のシャーシが直径35cmの縁に外接する八角形なのに対して、MIRS1104のシャーシは直径30cmの縁に外接する八角形と5cm縮小している。
サスペンションダンパーについて
ステップ及びシーソー攻略用に前後にサスペンションを取り付けた。前後でバネの硬さが同じだと走行中に前部が浮いてしまい白線を検知できなかったので、後部のバネを前部のものに比べて硬いものにすることで克服した。しかし、この状態では停止時・低速時は前部への荷重により前部のストロークマージンが無く、ステップ攻略が困難だった。そこで後部のバネを最初に取り付けたものより若干柔らかいものに交換することで、停止時・低速時に前部が浮いてしまうことによる白線の見落としを無くし、ステップ・シーソー攻略との両立に成功した。
バンパーについて
前方・左側・右側の三面にアクリル板を蝶番で取り付けたバンパーを設けた。しかし、車体側面部がコースに接触した場合、角度によってはタッチセンサーが反応せずに停止してしまうため左右のバンパーを延長するように曲げ加工したアルミ板を取り付けることで車体側面がコースに接触した場合でも回避動作に移れるようになった。またタイヤを半分ほど覆うようにアルミ板を取り付けたために、車体側面のコース接触によりタイヤの回転が止まり、モーターへ負荷がかかることでI/Oエラーが起きてしまうことを僅かながら防ぐことができる。左右のバンパーは蝶番1つでは蝶番の遊びによりコース接触の際にタッチセンサーが反応しない状況がしばしばあったので、左右のバンパーのみ蝶番を2つに増やすことで遊びを少なくし、タッチセンサーの反応をよくすることができた。
- エレキ:
電子コンパス
MIRSの生態補正のために電子コンパスを活用しようとしたが、完成に至らなかったため、当日は使用しなかった。回路設計、基盤作成までは完成していた。PICのプログラムを書き値を返すかどうかテストをしたところ全く値を返さない状態になっていた。原因の可能性としては2つあげられる。一つ目はPICのプログラムが間違っていたことである。今回使用した電子コンパス(HMC6352)は、I2C通信を使用するためI2CとRS232C通信の制御をしなければならない。しかし、私自身I2C通信を使用するのは初めてのことであり勉強が足りなかったと思われる。2つ目は電子コンパス自身が壊れてしまったことである。調査の結果、電子コンパスは非常に壊れやすい素子であり、GNDとVccを一瞬逆につないでしまっただけでも破損する可能性があることが明らかになった。電子コンパスの作成過程中一瞬だけこの操作をしてしまった可能性があり電子コンパスが破損したため値を返さなかったと思われる。
LCD
LCDでは、回路図の設計と、それを元に基板も製作した。回路図は、液晶ディスプレイについてのページを元に、bsch3によって作成した。LCDは、現在MIRSが行っている動作を表示することでデバックの効率化を図るためのものなので、動作毎に表示される文字を考え、文字を順次表示する段階までは完成させることができた。理想は、各仕掛けのプログラムの開始と終了、エラーを動作と連動して表示させることだったが、そこまでは完成に至らなかった(具体的な原因はソフトで記述)。 - ソフト:
通路走行:
全体的に行動のメインとなる重要なプログラムだが、50cm単位の移動はうまくいったと思う。左右のタイヤのモータのパワー違いなどをもっと追究し、左右のブレや補正などの細かい修正をもっとやりこめばよかった。
正対補正:
白線、壁をうまく使い分け、きれいに補正できた。数字認識に失敗した際は、補正からやり直すといった処理もうまくできていたと思う。
DB認識:
カメラが大きくDBからずれていなければ正確に数字を認識できていた。
各センサ値取得:
明らかにおかしい値ははじく等といった工夫を施してみたが、超音波センサはやりこみが足りなかったように思う。MIRSはセンサに頼っている部分がかなり大きいので、センサ類は完璧にしておきたい。
各仕掛け攻略:
優先順位を決め、重要度が高い方をもっと完璧にしても良かったかもしれない。とにかくデバックを繰り返すのでMIRSが元気なうちにどんどん実践テストしていったほうがいいと思った。
- 全体(マネージャ):
4.総括
-
- 勝又 健:
主にドキュメントマネージャーとして活動をしてきた。1年間を通して特にhtmlの知識、ドキュメントを書くスキルは著しく向上したと思う。MIRSの設計開発にチームで取り組み、自分がそれに携われて本当に楽しかった。メカの仕事で一番楽しかった点は、MIRS本体の加工や穴あけ作業が一番楽しかった。実習工場の技術職員の方々の講座を受けて機械の使用法等を教えてもらい、それをMIRSの加工で実践することでスキルの定着に役立った。しっかり技術が習得できてるなと感じることができる点がメカに携わって一番楽しい点であった。今後の改善点としては、ソフトウェア、プログラミングの知識がもっとあればソフトウェアを手伝うことができたのでソフトウェア、プログラミングの知識を習得していきたい。 - 諏訪 部純:
MIRS1104班における私の役割はエレキでした。エレキはLCDと電子コンパスの2つを製造し、私は電子コンパスを担当しました。総括にも書いてある通り電子コンパスは本番で使えるほどに完成しておりませんでした。原因は私の勉強不足にあり、完成しなかったことを非常に残念に思っています。1年間の後半ほとんどを電子コンパスの開発に携わっていたため、あまり班の役に立っていなかったようで、班の皆さんには本当に申し訳なく思っております。完成しなかったのは残念ではありますが、I2Cという今まで知らなかった通信方法についてある程度知識をつけられたことは良い経験になったと思います。班の皆さん、担当の先生方、1年間ありがとうございました。 - 田代 純也:
MIRS開発では、ソフト担当として主に攻略プログラム作成を行ってきた。11月には、モーター制御ボード改善プロジェクト(?) にも参加した。 ソフト担当として、通路走行や正体補正などのプログラムを作ったが、プログラムの構成に気を遣いプログラムを見やすくしようと努力した。作ってみて思ったことは、知識だけでなく発想力も必要だということだ。 MIRSは気まぐれで度々不調になって、そのデバックのために相当な時間を削られた。何度直しても治ってくれなくて憂鬱な時もあったが、それでも直してまた動き出したときの達成感は相当なものだった。 結局、本番では思うように動いてくれず仕掛けにたどり着くことさえできないまま終わってしまい残念だった。しかし、完走という目標にチームメンバー全員で協力して作業を行うことができたのはとても楽しかったし、開発中の出来事も知識や経験として得られるものが多かった。今思えば、うまくいかないことが多かったからこそだと思う。 来年度の人たちには、何が何でもゴールしてほしいと思う。 - 野澤 雅利:
競技前にOSが堕ちたのは予想外だったが競技前にやった試走でシーソーやロータリーをクリアしたことと、あの短時間で走れるまでに復旧できたことはこれまでやってきた成果だと思った。 - 増田 圭祐:
MIRSを通して、知識的にも経験的にも非常に多くのことを学べました。 自分は、ソフトをやらせてもらいました。プログラムは得意なほうではなかったけど、みんなに助けてもらいながらなんとかやってこれました。本番は、せっかく作ったプログラムを全部使うことができずに終わってしまいましたが、少なくともエラーが出るまではプログラム通り動いてくれていてよかったです。プログラム担当として十分な仕事ができたか?と聞かれると、自信を持てYesとは言えません。終わってみて思うことは、「あの処理はこうしとけばよかった」、「もっとほかの部分の勉強もしておけばよかった」等の後悔ばかりとなってしまいました。 授業としてMIRSが始まるまでは、「動いたらまだいいほう」というイメージがあったような気がします。授業も1年ぼちぼちとやりながら何もなく終わってしまうのかなと思っていました。でも、終わってみて振り返ると、とても濃い1年間を過ごせたと思います。マネージャーにはいろいろ任せっぱなしにしてしまい反省していますが、みんな自分ができることを一生懸命やってきたと思います。班もメンバーに恵まれて、とにかく楽しくやってこれました。またこのメンバーで徹夜したり、導通チェックしあったりできないのが寂しいくらいです(笑)。 当日、OSがダメになってしまったときは本当に絶望しました。競技本番であそこまで動くようにしてくれたマネージャーには、本当に頭が下がります。 結果として特別賞をもらうことができて、みんなの努力が少しでも報われて本当に良かったです。 - 山口 啓太:
班で仕事を分担し、協力して作業することができた。担当したエレキでは、LCDの回路図、基板の製作、ドータボード変更の回路図製作などを行った。LCDは、文字を表示する段階まではできたものの、それを実装し、MIRSの動作と連動させて表示し、デバックに活用するまでいかなかったため悔いが残る。全体としては、ハード面では、軽量化した機体により、標準機と比較して動作がスムーズになった。ソフト面では、仕掛け毎のプログラムを見直し、より確実にクリアできるよう改善を行ったため、成功率は上がっていたように思う。しかし、度々ケーブルの断線やモーターが動かないといった問題が発生したことで、作業が中断してしまう時間が多かったため、ケーブルの製作や組み立ての段階で問題がないかを確認し、ハード、エレキ面でのデバックの回数を減らせればよかったと思う。本番では、開始直前にOSが壊れたこともあり、目標とする結果には至らなかったが、班で協力し、1年間行った作業は、とてもいい経験になった。 - 山崎 陽平:
例年、ソフトウェアがうまくできていてもハードウェアの不調で動作不良ということが多く感じたので、概形ができてからもなるべく学校へ顔を出すようにしてソフト班からの改良要求になるべく答えられるようにがんばった…つもりです。設計時にはケーブル類の取り回しをあまり考慮せずにシャーシ設計を行ったので苦しい部分も少しありましたが、実際MIRS本体は想像以上にきれいに仕上がったので個人的には満足しています。ただ一つ、本番直前のOSクラッシュを除いて…。
- 勝又 健:
5.感想
沼津工業高等専門学校 電子制御工学科