方法:側面の壁に対して機体が25cmの位置にいる状態から50cm直進し、側面の壁に対して機体が25cm(±2)の位置にいる状態する。(超音波センサの誤差の範囲に収める)
結果:5割程度の確率で成功するがそれは補正中に停止状態になってしまうものと考えられるため概ね成功だった。
正対補正
方法:前面に取り付けられた2つの超音波センサの値を読み、2つの読み取った値の平均が50±5cm以内になるようにその場旋回する。
結果:回転角度をあまりに小さく設定すると動けず、回転角度を大きくしたところ動きすぎてしまい、処理が完了するまでに時間がかかる。また、誤作動を起こし目的の方向を向かないことがある。
タッチセンサ
方法:正面のタッチセンサに触れたら180°(±5°)回転する。
結果:タッチセンサに触れたら、180°(±3)程度の誤差で回転した。
白線センサ
方法:白線センサを検知したら95%の確率で停止する。(照明などの光加減による誤差も含める)
結果:白線センサを検知した信号はあったが前進中に白線センサが検知されても停止しなかった。
方法:左に向いた超音波センサからの値を読みながら通路を走行し、機体の左側の距離を一定に保つ。前方のセンサの値が小さくなり前に進めないときは、左のセンサの値を読み左に壁があるときは右折、左に壁がないときは左折する。
結果:前進動作は期待通りの動きをした。コースの角に来ると右左折の判断は正しくできるものの、前進動作から右左折動作にすぐ移っていけない問題が残っている。
小部屋
方法:
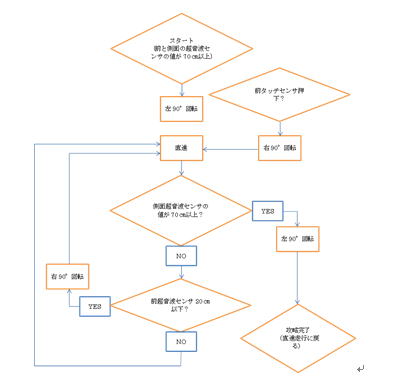
図1 小部屋攻略図
結果:
本番:小部屋まで行かなかった
練習:小部屋に入り、左90度旋回は正常。一つ目の角は正常に回転。その後、直線で左右のモーターの回転数に誤差が生じ直進できなくなった。結局、小部屋は攻略できず。
改善点
・モーターを正確に直進できるようにする。
・タッチセンサの割り込み処理ができるようにする。
ロータリー
方法:
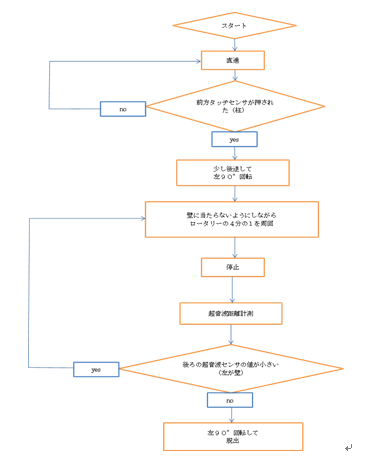
図2 ロータリー攻略図
結果:
本番:ロータリーは行かなかった
練習:小部屋のプログラムを優先して制作したため、ロータリーはテストを行わなかった。
改善点:しっかりテストする。
画像認識
方法: ROI走査を用いて、画像を読み取り数字を認識する。
数字を判断して、優先度の高い仕掛けの方向を向き、1ます分進む。
結果:数字認識はうまくいっていたように見えた。方向転換するときに90度以上曲がってしまったりし、うまくコースを抜けることができない場合があった。タッチセンサの導入が済めば抜けることが可能だと思われる。
鍵、扉
方法:50センチ毎にタッチセンサを確認し、値が返ってきたらわずかに後退、180度回転して3マス分進む。
結果:失敗した。原因としては、50センチ進む間にタッチセンサが押された場合反応しないため鍵に触れても、後退の動作に入らなかったことが挙げられる。
競技会中に電源ケーブルの問題から、CPUが軌道しなくなってしまい途中棄権することになってしまった
ソフトウェア
個別のプログラムはできたが、メインプログラムに組み込むところまではいかなかった。また、前進中のタッチセンサ、白線センサの割り込みプログラムまでは完成させることができなかった。
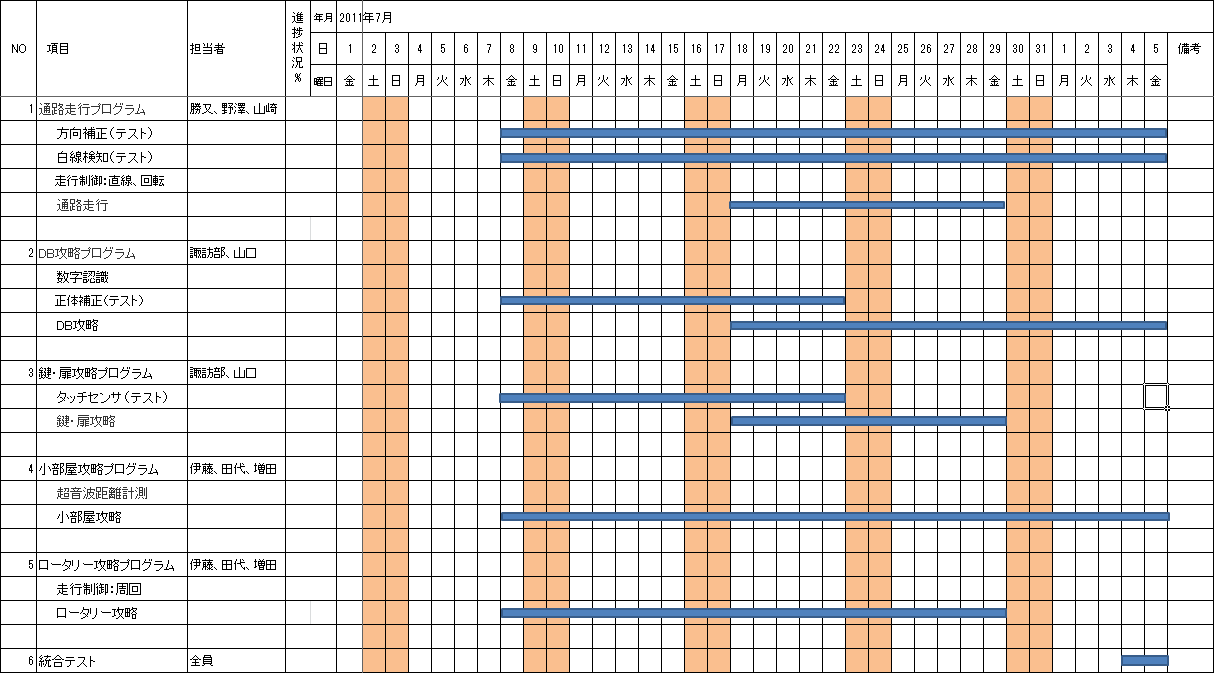
図,3 日程報告図