- MIRSの電子コンパスから角度値を読み取って、直進動作や回転動作の補正を正確にする。電子コンパスでは、0.1[deg]刻みで角度を測定することができるのでかなり正確な補正が可能になると予測できる。
- 通信手段 :
MIRSとの通信はシリアル通信を用いる。接続方法は、まずCPUからRS232C形式の信号を電子コンパスボードに送りインターフェースIC(ADM232a)を介す。インターフェースICによってTTLレベルに変換された信号をPICに送る。電子コンパスはI2C通信を使うので、TTLレベルのRS232Cs信号をPICによりI2C形式に変換する。最後にI2C形式に変換した信号を電子コンパスに送ることによって通信を行う。 - 抵抗について:
R1,R2:PICと電子コンパス間の通信のために100Ω程の抵抗を用意する。
R3,R4:プルアップ抵抗として用意する。
・最小値
各ドライバのシンク電流が最大3mA,On電圧0.4Vmaxという制限がある。
Rp > (Vcc-0.4)/3mA
よって、Vcc=5vとすると Rp > 1.5kΩ
・最大値
浮遊容量とプルアップ抵抗で形成する時定数で、パルスの立ち上がり時間を決めるので、これによりプルアップ抵抗の最大値が決まる。
浮遊容量100pFとして、通信速度100kbpsを使うとすると、
Rp < 1000nsec/100pF = 10kΩ
以上の2つより
1.5kΩ < Rp < 10kΩ
Rp=7.5kΩ
とした。
R5:PIC(リセット)のプルアップ抵抗として、データシートより10kΩ程度の抵抗を用意する。
- インターフェースIC (ADM232A)
- PIC (PIC16F628A-/IP)
- 電子コンパス (HMC6352)
- タクトスイッチ reset (赤色)
- カーボン抵抗 R1,R2 (7.5kΩ)
- カーボン抵抗 R3,R4 (100Ω)
- カーボン抵抗 R5 (10kΩ)
- セラミックコンデンサ C1~C5 (0.1μF)
- 電子コンパスボードをMIRSにつなげる。MIRSを回転させて電子コンパスの角度の値を読み取りディスプレイに表示させ、値を返しているかどうか確認する。
- また、回転した角度を分度器ではかり、その角度とディスプレイに表示された角度が一致しているかどうかを確認する。
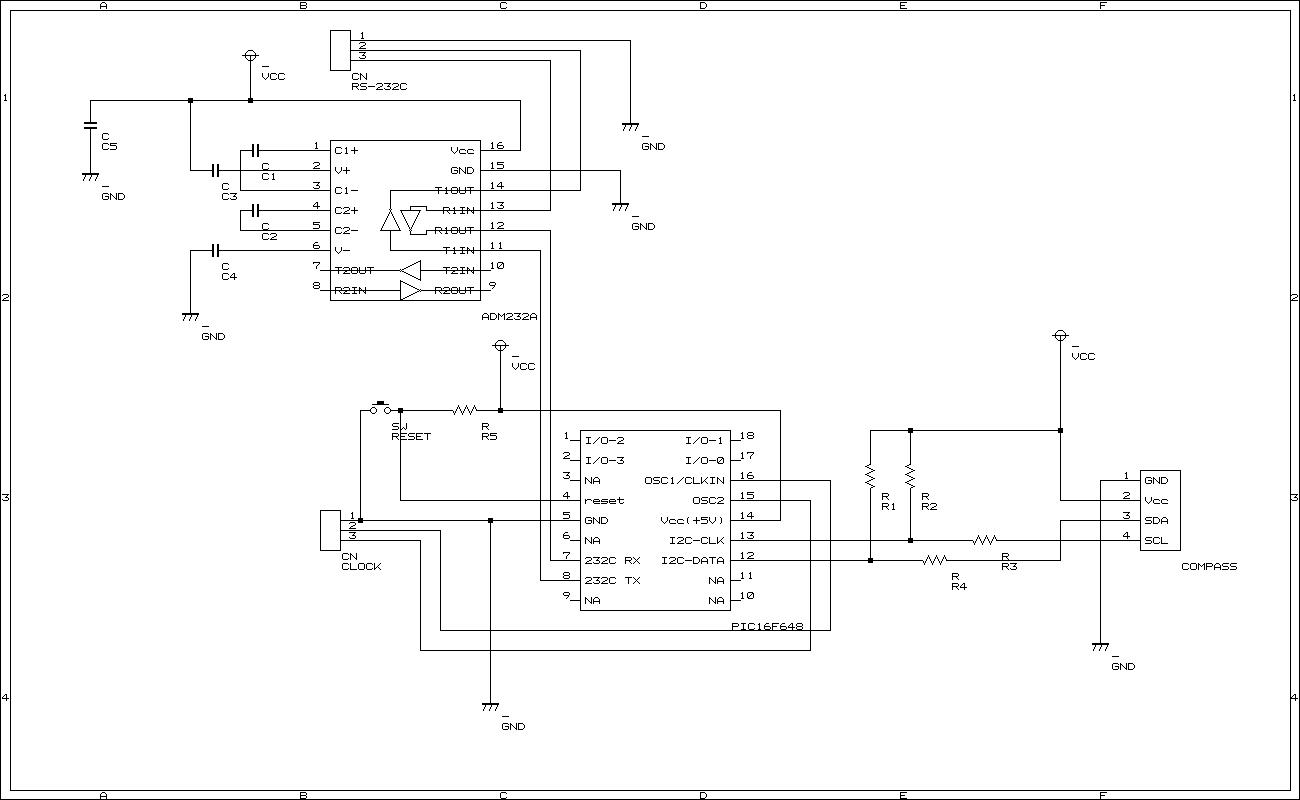
図,1, 電子コンパス回路図