- コンセプト
- Small(小型化)
- Smart(効率化)
- Simple(単純化)
- 改造・追加部分(ハード)
- 改造・追加部分(ソフト)
3S
・サスペンション
・LCD
・電子コンパス
・LCD表示
・電子コンパスでの角度認識(デバイスドライバ)
・直進、回転動作でのts(タッチセンサ),ws(白線センサ)の割り込み処理
- 変更点
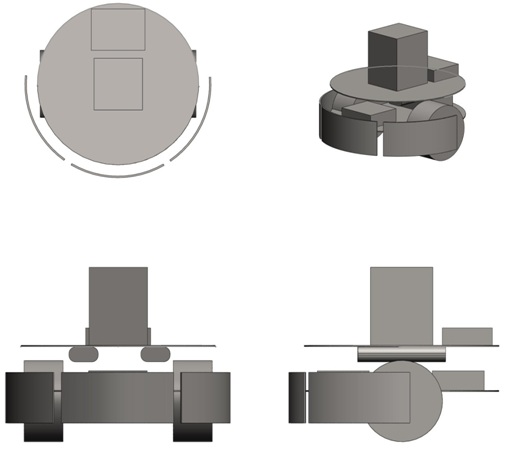
図,1, システム外観図
- ポリシー
- 方針
- 改造・追加部分との連動
予期せぬ動作が起きるのを防ぐ
・以下に全体の動作のフローチャートを示す。
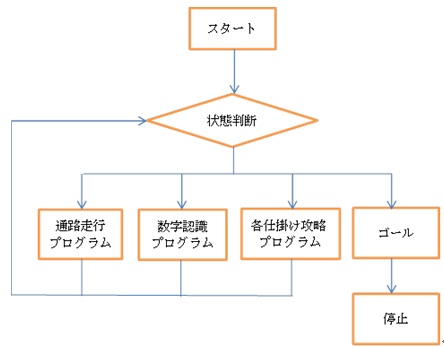
図,2, フローチャート
ゴール>>ゴールに近い>>小部屋>>鍵>>ロータリー>>T字路>>十字路>>のれん>>行き止まり
※数字が認識できなかった場合、両方同じ数字だった場合は右へ曲がるようにする。
・ゴールへの最短距離を選んで進むのではなく、攻略に自信がある仕掛けを選ぶことより、確実にゴールすることを全体の攻略方針とする。
・サスペンション:シーソーの段差を滑らかに進むために追加する(コース攻略の効率化)
・LCD:現在の状態を表示することでデバッグのしやすさをあげ、パフォーマンスとしても使用する。(開発環境の効率化、ソフトウェアの単純化)
・電子コンパス:現在の角度を調整することで回転、直進補正を行う。(コース攻略の効率化)
・ts,wsでの割り込み処理:走行動作時のトラブルを解決するために用いる。(ソフトウェアの単純化)