| 名称 |
MIRS1103 メカトロニクス詳細設計書 |
| 番号 |
MIRS1103-MECH-0001 |
最終更新日:2011.11.18
| 版数 |
更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2011.12.19 |
坂本和彦 |
北川琢真 |
初版 |
目次
- 本ドキュメントについて
- システム概要
- 本ドキュメントについて
本ドキュメントはMIRS1103のメカトロニクス詳細設計についてまとめたものである。
- システム概要
MIRS1103では、シーソー攻略、MIRSの軽量化および低重心化のためにMIRSを上・中・下の三段にし、上段をアルミ複合板で作成し、中段と下段の間にサスペンション(ダンパ)を設置し衝撃吸収と共にスムーズな走行を実現させる。
- 上段シャーシ
上段シャーシは標準機と同じように設計する。
上段シャーシ製造仕様書
※上段シャーシにはLED基盤×2、webカメラ、超音波センサ×4、電源基盤を載せる。
- 中段シャーシ
中段シャーシの設計図を以下に示す。
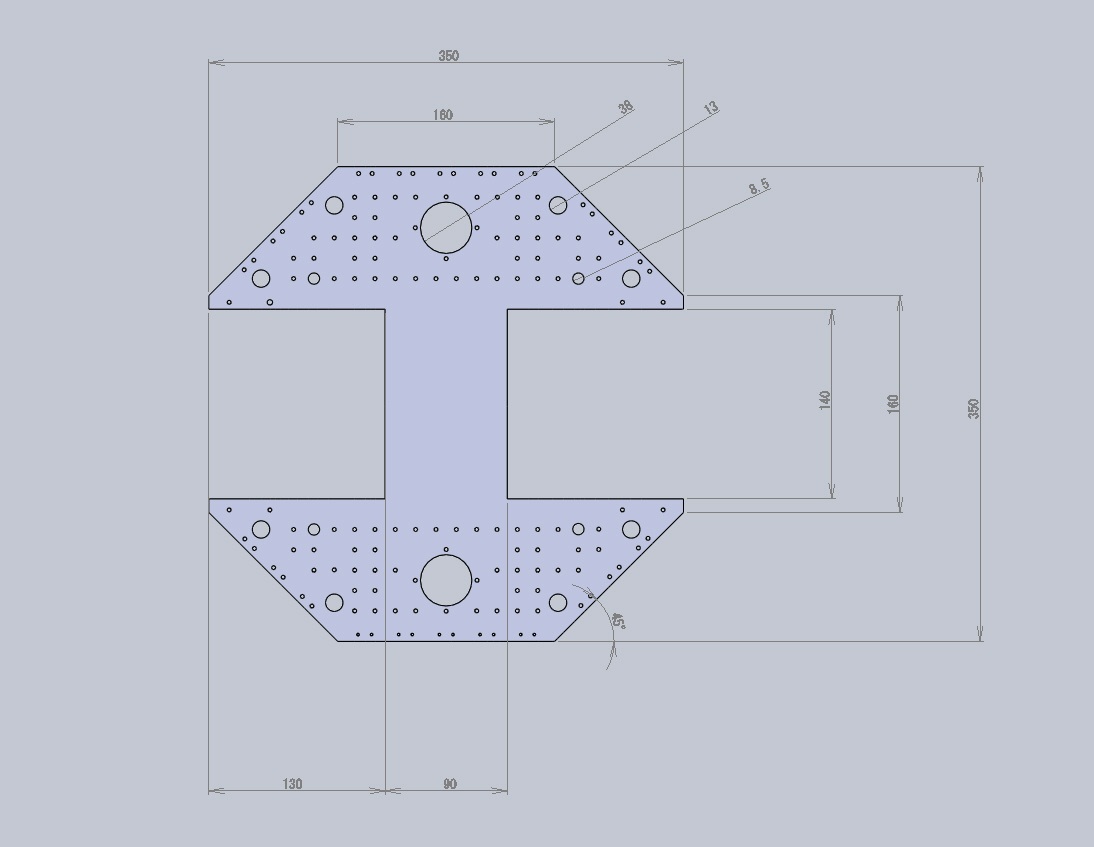
図2-1.中段シャーシ
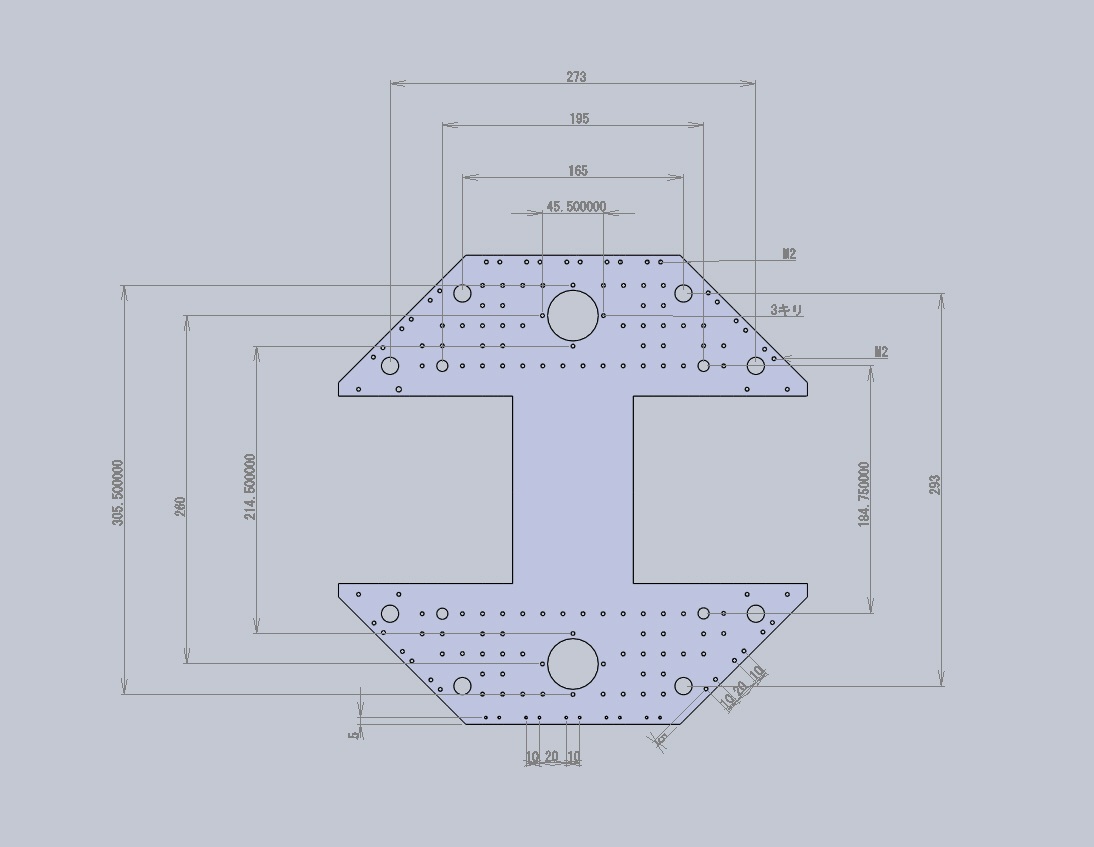
図2-2.中段シャーシ
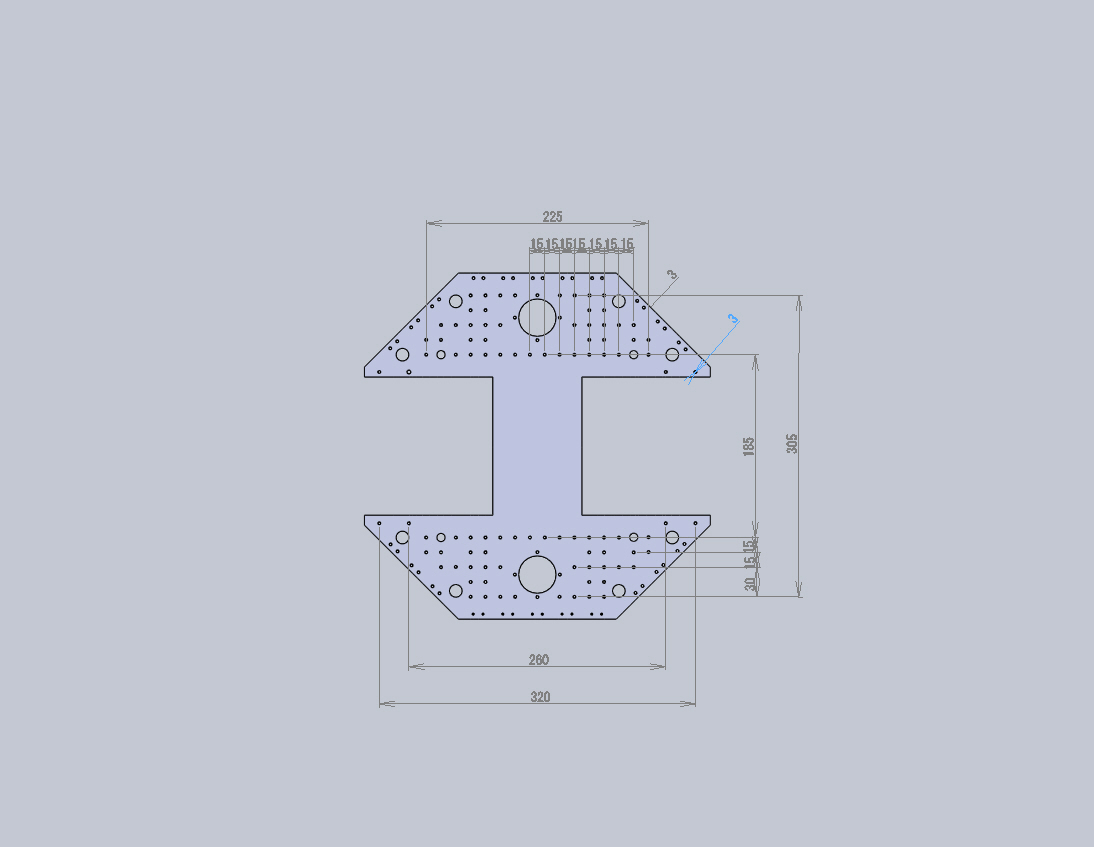
図2-3.中段シャーシ
※中段にはモータ制御ボード×2、CPU・FPGAボードドータボード、バッテリー×3を載せる。
- 下段シャーシ
下段シャーシの設計図を以下に示す。
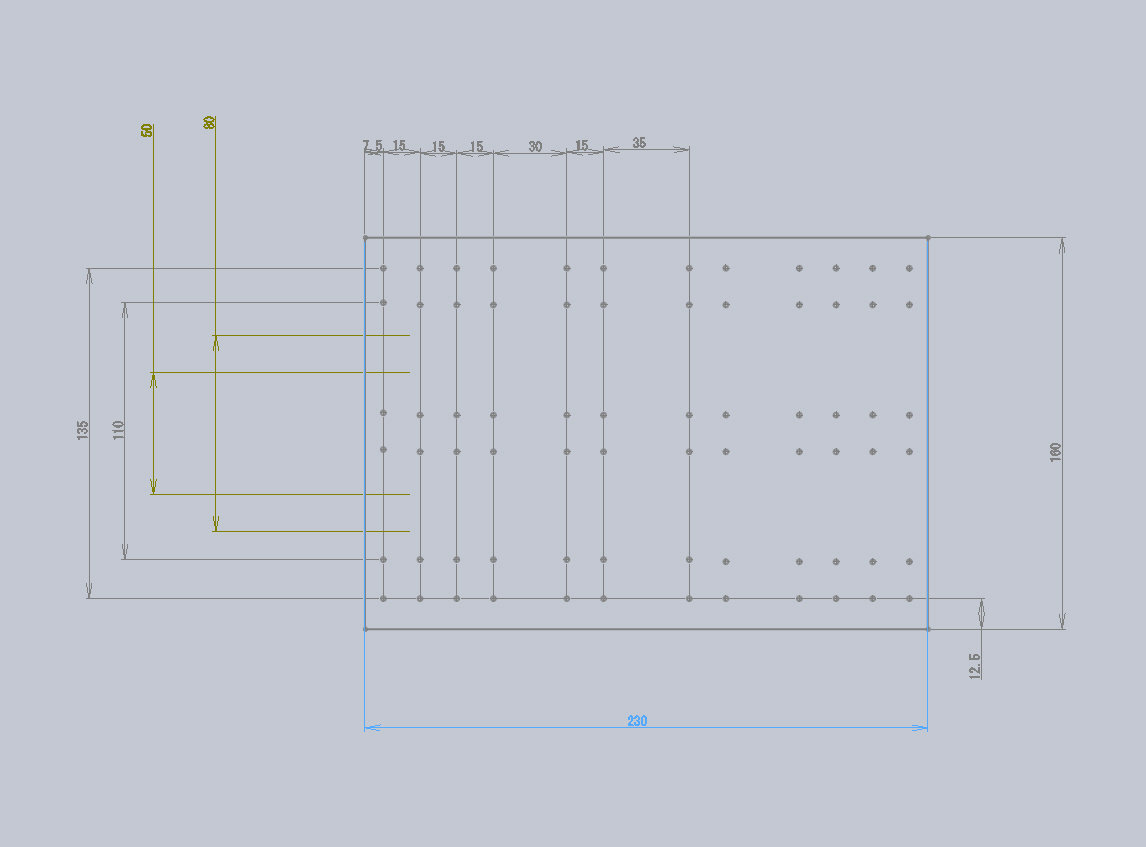
図3.下段シャーシ
※下段シャーシには、モーターとエンコーダを載せる。
- サスペンション
サスペンションとして「
SP-519 タミヤ CVAダンパー・ミニ2を4つ用いる。
このサスペンションは中段シャーシと下段シャーシの間に設置する。
設置図を以下に示す。
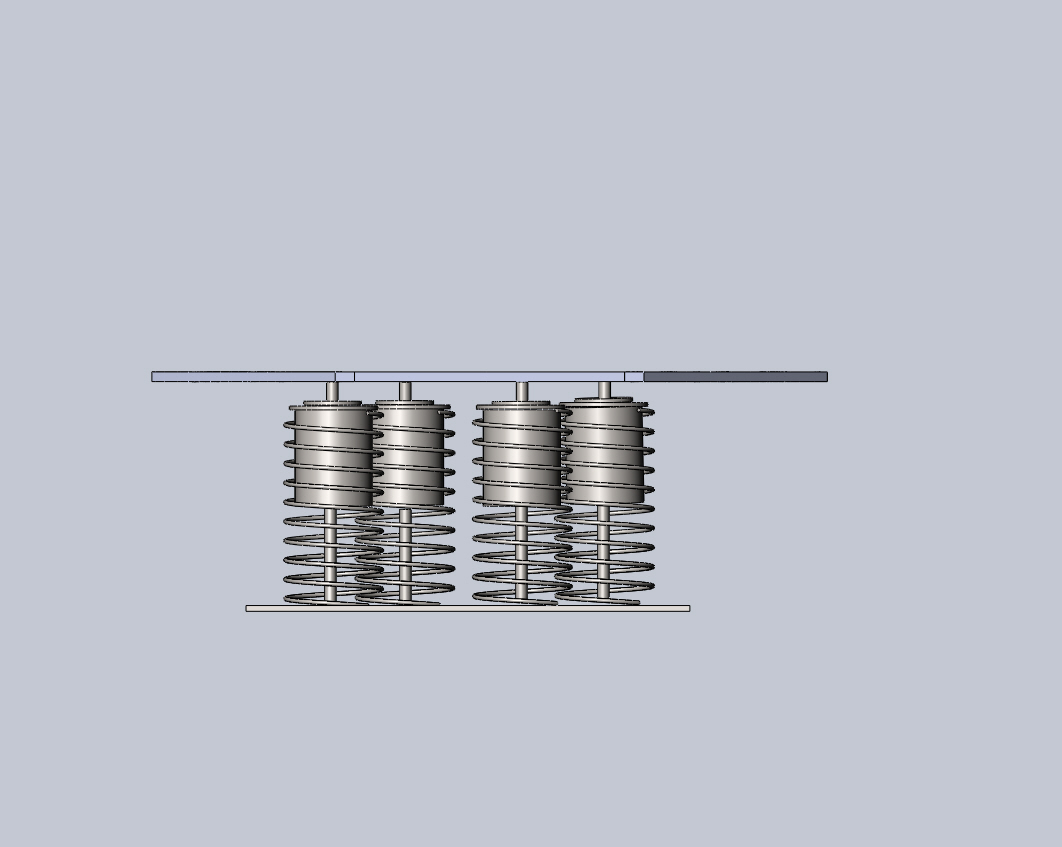
図4.サスペンション設置図
沼津工業高等専門学校 電子制御工学科