| 名称 |
システム基本設計書 |
| 番号 |
MIRS1005-DSGN-0002 |
最終更新日:2010.09.17
| 版数 |
更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2010.09.17 |
刑部 |
石金 |
初版 |
目次
- 本ドキュメントについて
- システム概要
- システムの詳細
- ハードウェア
- エレキ
- ソフトウェア
1. 本ドキュメントについて
本ドキュメントは、システム概要及びその詳細についてまとめたものである。
2. システム概要
ハード面
- 電子コンパスを使い、さらに多くの情報を得る。
- 既存のシャーシを廃止し、新しいシャーシを作成する。
- ころころ(ローラー)により、引っ掛かりを防止する。
ソフト面
- 各センサーを用いて課題を攻略する。詳細については後で述べる。
電子コンパス
正対補正、直進時の補正や、シーソー時の傾き判断にしようする。0.1度の角度まで測ることができるため、細かい補正が可能
データの転送にはシリアル通信を用いる。
超音波センサー
正対補正、壁の有無を判断する。前方と側方の3方向に付ける。
タッチセンサー
壁にぶつかったことを判断する。コロコロ部分に接続する。これにより、ロータリーをクリアする
白線センサー
DB前、ゴールを判断する。平行に2つ接続する。
赤外線センサー
カギと扉の攻略に使用する。
3. システムの詳細
3.1 ハードウェア
①電子コンパスについて
電子コンパスは直角に曲がるときや正対補正するときに用いる。
今まで正対補正や直角に曲がるときにはモータの出力だけで設定していたが、
電子コンパスを用いてフィードバックを行うことでより高精度な正対補正、直角に曲がることができる。
新しい情報が1つ増えることにより迷路攻略を狙う。
②超音波センサについて
超音波センサは4つ(前方に2つ、左右に2つ)取り付ける。壁との距離を一定に保つ役割を果たす。
また、正体補正を行う時に使用する。
4つにすることで精度を向上させる。
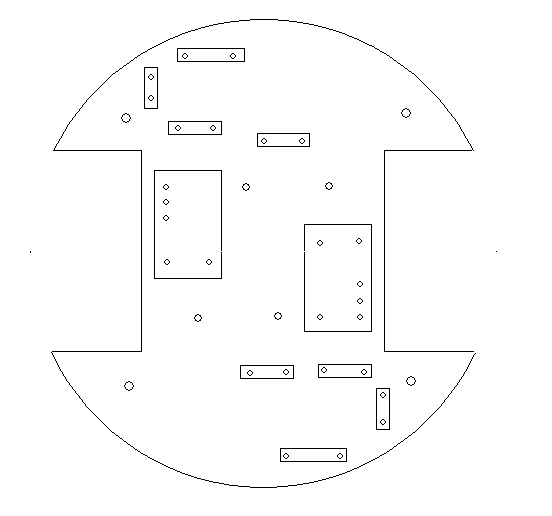
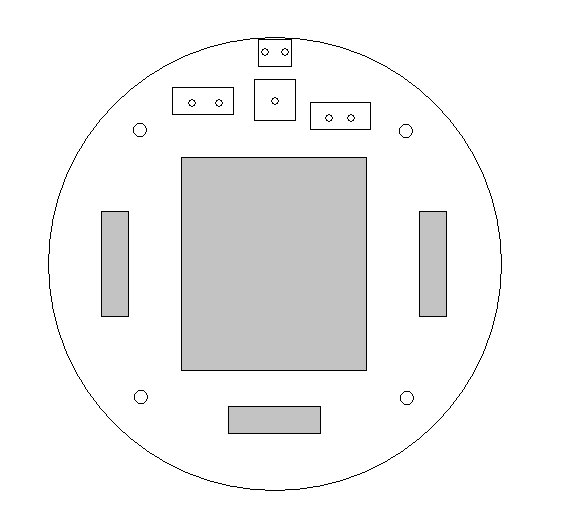
③新シャーシについて
シャーシにはポリカーボネード板を使い、円形にする。
これにより、軽量化され、壁にも引っかからなくなる。
概要
・直径350mmの円形
・厚さは2mm
・切削、穴開け加工可能
・折れたり割れることはまず無いが、たわみやすい
機構
・下シャーシに電池をつけることで低重心化
・パーツを中心にまとめ、タイヤがシャーシの中に
・上段シャーシには穴が開いており低重心に
備考
パーツを載せてたわむ場合、塩ビ板での補強など、何かしらの対策を考える
④白線センサについて
白線センサは2つ使用する。MIRSの下段シャーシ底面の前方に左右対称に取り付ける。
両方のセンサが感知した時に、DBの読み取りを行うようにする。これにより、DBに対して垂直に正体することができる。
また、数字認識ができなかった場合、前進後にもう一度白線センサを感知させる。
白線センサが感知したらゴールとみなすことにさせる。
⑤ころころについて
シャーシに直径4cmの円盤を取り付け、壁に当たっても引っかからずにスムーズに進むようにする。
ロータリー攻略の時に使用し、カーブをうまく回れるようにする。
また、円盤をタッチセンサと連結させて、タッチセンサの役割も果たすようにする。
もしかしたら、使用しないかもしれない
3.2 エレキ
現在の問題点
・既存の基盤が時々ショートする。
・回路がよくわからないんで問題が起きても解決できない。
回路をよく理解し、たくさんMIRSを動かすことで安定したMIRS開発に貢献する。
新規機能
電子コンパスについて
I2C通信を用いている。I2C通信とはInter-Integrated Circuitの略である。2本の信号線によって、比較的近い場所にあるデバイス間の情報伝達を行うためのシリアルインターフェースである。
MIRS1005では外部からの情報をできる限りたくさん取り入れるように電子コンパスを搭載する。
超音波センサについて
・超音波センサをMIRS1005では左右に1台づつ、前に2台の合計4台搭載する。
そのために超音波センサの親機のPICのプログラムの変更をする必要がある。
MIRS1005のエレキ班では競技会前にはプログラム等の手伝いに回れるように早い段階での完成を目指す。
3.3 ソフトウェア
仕掛け攻略
基本的に通路走行以外はDBの数字認識によって、仕掛けを判断し、その攻略プログラムを行う
1.通路走行
① 左右の超音波センサで側面の壁を探索
② 左右の超音波の合計値を一定に保ちながら、直進
③ 合計値が一定値を超えたら、前方の超音波センサが一定値になるまで前進
④ 超音波の値が返ってこない方向を確認
⑤ 電子コンパスを用いて④の方向に90°回転
⑥ 左右の超音波センサの合計値が一定の値になるまで前進
2.小部屋
① 前方の超音波と左右の超音波の値が一定値を超えたら、小部屋と判断
② 少し前進して、電子コンパスを使って右方向に90°回転
③ 前方の超音波センサがある値になるまで前進
④ 電子コンパスを使って、左に90°回転
⑤ 壁側の超音波センサを一定値に保ちながら直進
⑥ 右の超音波の値が返ってこないとき、右に回転
⑦ 左右の超音波センサの合計値が一定の値になるまで前進
3.ロータリー
① 左右の超音波がなくなったら、壁にぶつかるまで直進
② 壁に衝突したら後退
③ 電子コンパスを用いて、左に90°回転
④ 左右の超音波センサの値を一定に保ちながら、ロータリー内を移動
⑤ 左の超音波センサの値が返ってこないとき停止
⑥ 電子コンパスを使って、左に90°回転
⑦ 少し前進し、通路走行動作に戻る
4.十字路
① 超音波の値がすべて返ってこないとき、十字路だと判断
② 白線センサが感知するまで直進
③ 白線センサを感知したら、数字認識
④ DBの下段に9(ゴールに近い)を発見したら、壁に向かって直進
→0ならば、⑤へ
⑤ 超音波の値がすべて返ってこなくなるまで、後退
⑥ 電子コンパスによって、右に90°回転
⑦ ②~⑤を行う
⑧ 電子コンパスによって、右に90°回転
⑨ ②~⑤を行う
⑩ このときは下段に9(ゴールに近い)を発見できなかったことになるので、3つの道の中で数字認識をうまくできた場所に進む
→その中でもより迷路の仕掛けが簡単なほうへ進む
5.鍵
① 数字認識によって鍵の方向を判断
② 少し前進し、その方向へ回転
② タッチセンサが押されるまで、直進
③ 少し後退し、電子コンパスを使って180°回転
④ 通路走行動作に戻る
画像処理について
DBで数字認識を行う。周辺分布法とパターンマッチング法があるが、周辺分布法を使用する予定である。
4つの数字の画像認識は作成中であるが、その数字の読み取りと数字の配置場所を認識できるようにする。
また、夏におこなった数字認識プログラムの作成では認識度が低かったため、そこも改良する必要がある。
シャーシの基本設計
下段 上段
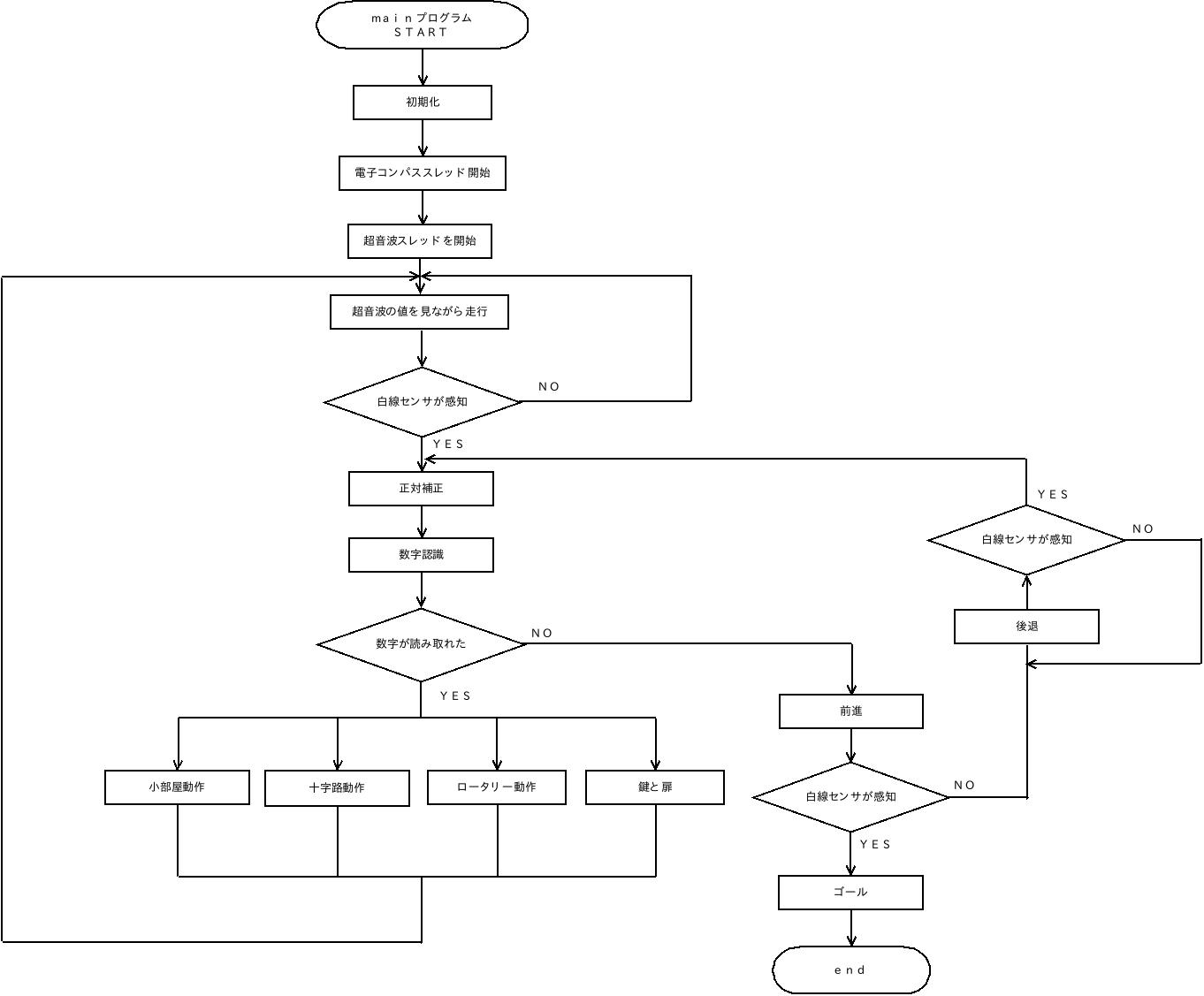
mainプログラムのフローチャート
沼津工業高等専門学校 電子制御工学科