| 名称 |
MIRS1003 ロータリプログラムについて |
| 番号 |
MIRS1003-SOFT-0001 |
最終更新日:2011.01.14
| 版数 |
更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2011.01.14 |
斎藤秀人 |
斎藤秀人 |
初版 |
目次
- プログラム概要
- フローチャート
- 備考
- プログラム概要
このプログラムではロータリの突破を行う。
プログラムの開始はロータリ突入時、引数はなし、戻り値はなし、プログラムの終了はロータリから脱出した時である。
以下より、具体的な攻略法について書く。
- ロータリに突入した状態でプログラムが開始される
まずは45~90°ほど左に回転する
- motor_circle関数を使用し周回動作を行う。現時点では右回りの予定である
- このとき、
- 左のタッチセンサが押されたら、少し後退する
- 右のタッチセンサが押されたら、少し後退し、左旋回
という動作を行う
- 2. と3. を繰り返す
また、左の超音波センサで、左側に壁がないのを感知したら5. へ進む
- 左へ旋回
正面に二つ設置した超音波センサが壁を感知しなくなったら旋回終了
- 前進してロータリから脱出したらプログラム終了
- フローチャート
以下にこのプログラムをフローチャートで表したものを載せる。
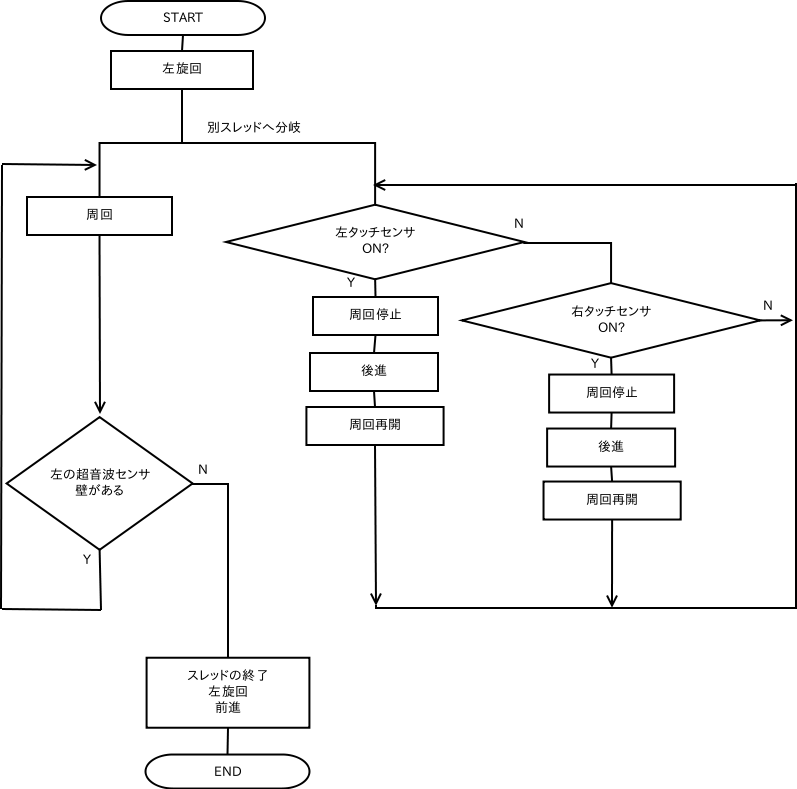
fig. 1 ロータリプログラムのフローチャート
- 備考
実際に動かしていないので、現時点では特になし。
関連文書
沼津工業高等専門学校 電子制御工学科