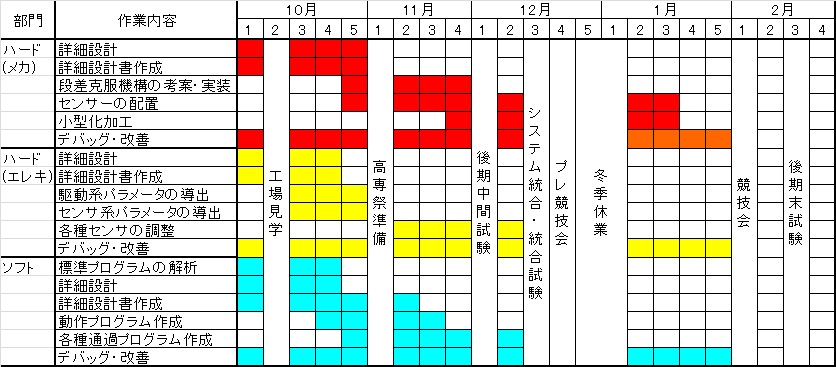
予定
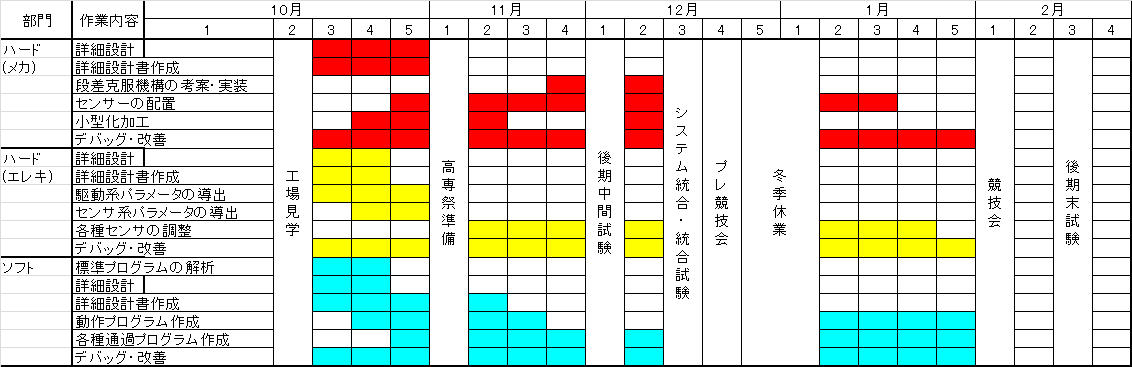
実際
個人別
| 岡本彰人(P) | 近藤鉱也(S) | 斎藤秀人(S,DM) | 佐藤剛(M) | 高村智史(Man,E) | 蒔田大嗣(M) | 村瀬慶和(E) | 望月玲於奈(S) | 脇坂久(M) | 合計時間 |
| 290.5h | 145h | 234h | 151.5h | 228h | 171h | 260h | 240h | 162h | 1884.5h |
| メカ(M) | エレキ(E) | ソフト(S) | 総計 | |
| 合計時間 | 484.5h | 488h | 619h | 1591.5h |
| 1人あたり平均 | 161.5h | 244h | 206.3h | 198.9h |
- メカ
- フロントバンパーの壁接触時の衝撃が大きく、機体に影響が出てしまう時がある
- 機体回転時に通路の角にサイドバンパーが引っ掛かる場合がある
- ステップに対して斜めに通過しようとした場合、ステップの真上にいるときに壁と接触し、補正をかけるため止まってしまう
- エレキ
- 超音波センサの感度が毎回バラバラになるときがある
- モータードライバの信号のやり取りができていない
本番一日前にモータードライバが信号を読み取れができなくなり誤動作が起きた。
本番では標準機のモータードライバを使わせてもらったので動いたが、自分たちのモータードライバはフォトカプラが原因要因と考えられる。 - 白線センサLED
白線センサに常に一定の光が反射するように作った白線センサLEDだが、
本番では、モータードライバに力を入れてしまい時間がなくつけるのを忘れてしまった。
しかし、プレ協議会では、正確にどこでも白線を見つけることができるようになっていた。
- ソフト
- 本体の完成が遅かったことや故障による検証不足
| 1回目 | 2回目 | 合計 |
| 0点 | 0点 | 0点 |
- 競技会プロジェクト
競技場の作成を主に行った。
前期では夏休みの体験入学に向けてのプレ競技場を、後期は、澤研の前のリフレッシュルームに設置するプレ競技場と、本番用の競技場を作成した。
また、A&Sへ参加した。
ダイレクションボードと競技で使用する借用物のまとめをした。 - メカ
MIRS1003の特徴として分裂機構や機体を覆う形状のタッチセンサ、外見を華やかにするためのLEDライトなどを採用した。
製作途中に問題が発生することが多々あったが、その都度修理・修正を行った。
競技会ではもっと動き回って活躍するところを見たかった。 - エレキ
エレクトロニクスでは、超音波センサの増加、モーターボードの作成、ケーブル作成、LED装飾などを作り実装を行った。
前期では、各ボードの作成をした。半田付けや動作チェックで遅くまで時間がかかったこともあり大変だった。
後期では、LED装飾やケーブル作成を早く行い、ソフトが予定より動けるようにするため調節を行った。 - ソフト
ソフトでは、画像認識プログラム、駆動系プログラム、各障害突破プログラムと、それぞれを統合するためのメインプログラムを作成した。
それ以外にもリモコンプログラムやテストプログラムのような、開発に便利なプログラムの作成も行った。
結局、競技会では最初のシーソーでモータエラーが出てしまい、ソフトがどんなものを作っていたのかを披露できなかったが、競技に必要なプログラムはすべて完成させることができた。
岡本彰人(P)
最初はもっと班の作業に参加できると思っていたが、実際にはほとんど参加することができなくて少し残念だった。
競技会では他のメンバーに比べあまり仕事をしていなかったので申し訳なく思う。今年の競技もどの班もクリアできなくて残念だった。
近藤鉱也(S)
私用で忙しく、あまり授業時間外に作業できなかった。メンバーのみなさんに申し分けなかった。
授業時間内では、プログラムを3~4こ書いたが、協議には全く使用されなかった。実力不足を痛感したので、
もう少し自分で勉強し、みんなの役に立てればよかった。
斎藤秀人(S,DM)
MIRS1003のみなさん、今年度はお世話になりました。
自分はこの班でソフトとドキュメントマネージャーを兼任したわけですが、そのどちらも思うようにはいきませんでした。
特にソフトに関してはひどかったです。ソフトメンバーとの連絡連携不足、仕事の割り振りのテキトーさ、共同作業の少なさ、共通意識の低さなど、
考えれば考えるほどに改善すべき点を挙げることができます。
それでもどうにか、自分でコードを打ちもう一人のコードと統合し、ソフト班としてプログラムを競技に出せたので、そこだけは良い評価をつけてもいいと思います。
ところで、競技会は散々な結果でした。この原因を大雑把に考えてみようと思います。
ソフト班についてですが、各障害突破プログラムをきちんと完成させられなかった、デバック作業に費やせた時間が少なすぎた、統合プログラムに時間をさけなかったなど、
とにかく、MIRS実機での作業時間が少なすぎることが原因であると考えられます。
メカ、エレキ、ソフトの三部門の中で、一番最後に作業を始め、しかも一番時間をかけなければならない部門なので、作業できる時間が少ないというのはかなり痛手になっていたのではないでしょうか。
そしてなぜソフトの作業時間が少なくなっていたのかというと、それはメカ、エレキに時間がとられたからです。特にエレキにはかなりの時間を取られました。
ここでもまた原因を掘り下げて考えてみます。なぜエレキに時間を取られたのかというと、それはおそらく、手本となる標準機が提示されていなかったからだと思います。
手本を見せずに一年間でロボットの開発を行えと言われても、普通はなにもできません。実際は、昨年度の遺産とドキュメント台帳のおかげである程度のものは作り上げられましたが、
標準機がなく、それもなければ、何もできないままに一年が終わっていたでしょう。
そもそも、指導側に「標準機は動くよ」(←よく聞く台詞)と言われても、標準機がどれほど動けるのかを私たちは知りません。
多少テストプログラムで動かした以外は、迷路を攻略している姿どころか床を走っている姿も見たことがないのです。本当に動くのかどうか怪しいところです。
というか実際のところ、標準機は動かないから工作室に置いてありませんでした。
そして、動くだけなら開発段階でMIRS1003はかなり動いています。競技ではどうであれ、開発段階では一番元気でした。
これからわかるとおり、問題は「果たして競技に耐えうるのか」ということであり、「動くのかどうか」ではありません。
そんな信頼性のかけらもない標準機すら示されないまま「ロボットの開発を行え」と言われた結果、電子機械設計製作は半端ではなくハードルの高い授業となり、競技会があの結果になったのです。
もちろん、標準機を示さなかった指導側に原因のすべてがあるなどという気はありません。標準機がなかったことでMIRS開発のハードルは上がりましたが、不可能になったというわけではないからです。
実際、自分に反省点は山ほどありますし、それらを改善することができれば完成度の高いMIRSになったのではないかとも思っています。
自分でも何が言いたいのかわからなくなってきたので、ここでまとめてみます。
まとめてみると私の所感は、
・標準機がないのは難度が高すぎる
・自分の反省点、改善点が山ほど見つかった
という二点に集約されます。
とりあえず、ソフト担当としては、動かしてもモータエラーが出ないMIRSがほしかったです。
それがない限りは、ソフト開発をしても意味がないので。
一年間お疲れ様でした。
佐藤剛(M)
僕は、一年間を通して前半はハードを担当し、後半はハードのバグを修正しつつシステム試験の手伝いをしていました。
上段・下段シャーシやバンパー、前面のタッチセンサ、側面のタッチセンサ、(モーターボード超音波センサをシャーシに取り付けるための)櫓、バッテリーケースなどの製作をしました。
バグ修正では、モーターボードに振動を伝えないようにするための耐震機能を取り入れ、また、ステップを越えられるように対策を施しました。
後半は、モーターボードのバグに悩まされましたが、一年間みんな頑張ったと思います。
高村智史(Man,E)
MIRSのチームマネージャとして、できてとても楽しかった。
競技会までに、ケンカなどでチームがバラバラになりそうな時もあったが、
競技会一週間前には毎日、みんなで夜遅くまで学校に残り、MIRSの完成を行った。
その時初めてチーム一丸となって、競技会に臨む事が出来た。
MIRSではエレキを担当したので、いろいろなボードやセンサを作り、電子回路の知識も多く身につける事ができた。
マネージャーでは、マネージャーとしての責任感と人を動かすのに苦労をした。
最後にはみんなで協力をして、競技に出られたのでとても満足している。
MIRSで身に着けたスキルを今後いろいろな所で生かしていけたらいいと思います。
蒔田大嗣(M)
MIRS1003一年間お疲れ様です。
僕はハードの設計・製作を担当しました。シャーシ分割機構の設計に苦労しましたが、
本番で効果を披露することができなく残念です。
ハードの不備でMIRSを占領してしまう時間が多く、ソフト班には迷惑をかけてばかりでした。
競技会の結果はよくありませんでしたが、チームで一つの目的をもって活動するのは楽しかったです。
村瀬慶和(E)
最初から最後までまとまりのない班で、大変だった。初期段階ではみんながどのような状況にあり、
MIRSをどのような動作にするか・どのような形にするかなどが把握できていなかった。
そのため個人的にレポートに進行状況・今後の課題・目標などをまとめたが、それでもエレキ・メカ・ソフトの間で情報の食い違いが発生した。
決して団結力があり、士気のある班ではなかったと思う。モーターボードなどの基盤は去年のものを使用したが
配線やハンダがめちゃくちゃでそれを修理・動作させることにエレキの大半の時間を費やした。
モータボードは使える状況ではなく作り直したものが一つ、超音波センサも修理や新しく製作したものがあった(増設した 超音波センサを除く)。
初期段階から考えていたことだが、受け継いだMIRSによって最初からスタート地点が異なるのはフェアではないと思う。
故障を直す時間が半分以上を占め、そのため予定通りに計画を進めることができなかった。
そのためこれからのMIRSでは前年度の機体を使用しないで、すべての班で1から基盤を作製するべきだと思う。
そのほうがはるかに短時間で基盤を作製でき、また基盤がどのようになっているかを把握できると思う。
基盤の設計も改良するべきだと思う。コネクタ部分が最初から接続できる設計ではなく新たに穴を拡張する必要があった。
そのため接続が悪く、その部分による故障が最も多かった。
全員の班が自由に動かすことのできる機体を1つ製作するべきだと思う。
ソフトが実際に仕事が始められるようになったのは機体が完成し、正常に動作するようになった11月頃からだった。
このためソフトは協議会まじかになっての作業が多くなり、ソフトには迷惑をかけたと思う。
よって自由に動かせる機体が1つでもあれば、初期段階からプログラムを動作させることができ、本番まじかになって焦ることもなくなると思う。
競技は年々難しくなっているが、よりシンプルな内容にしたほうが良いと思う。
年々PCのスペックは高くなり可能な処理は多くなっているが、人がついていけなくなっている。
そのためシンプルだが基礎はしっかり学習できるレベルのものにしたほうが良いと思う。
実際今回や去年は競技にすらならずすべての班がスタートで止まったり1つの関門だけといったような、すべての迷路を使わない状況になっている。
最後に競技前になって突然動かくなったときはかなり焦った。しかし競技直前になって動いたときは初めてみんながまとまって作業した感覚があり感動した。
望月玲於奈(S)
とても残念な結果に終わった。
感じたことは
まず各班はMSEに分かれずに、全員で標準機を完成させるべきった。
早ければ早いほど開発が有利になるので、残業は最初から多くとったほうがよかった。
完成後はまず、通路動作を完璧に作るべきだった。
いくら他の仕掛けが突破できるようになっても、たどり着けなければまったく意味がない。
最後に、
競技開始前に迷路マップを手動で入力し走らせるプログラムも用意していたが、そちらを実行していればよかった。
脇坂久
ハード班として活動させてもらいました。
初めはMIRSの構造をどのようなものにし、どのようなセンサーをどこに取り付けるかと、構想から始まりメンバーで作成していきました。
活動時間中いろいろな考えや衝突がありました。今回MIRSでは人をまとめることの難しさや、シャーシの加工やオリジナル部品の開発などいままでにやったことのない貴重な経験を得ることができました。
しかし、最終的には動くところをお見せできませんでしたが個人的には作れたということだけで達成感を得れ良かったと思います。