| 名称 |
MIRS1003 システム基本設計 |
| 番号 |
MIRS1003-DSGN-0004 |
最終更新日:2010.6.11
| 版数 |
更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2010.9.10 |
斎藤秀人 |
斎藤秀人 |
初版 |
目次- システム概要
- 標準機との相違
- 1. システム概要
- 1.1 開発コンセプト
- 左(右)手法によってとにもかくにもゴールする。
ゴールあっての物種。
- 1.2 競技における動作
- 競技一回目
左(右)手法により順次進行。T字路、十字路ではDirectionBoadにより進路の選択をする。
また、このとき取得したDirectionBoadの値を記憶しておく。
競技二回目
一回目と同じく順次進行。記憶しておいたDirectionBoadの値を再利用しDirectionBoadを考慮せずに進行する。
- 1.3 各障害突破の基本方針
- DirectionBoad
撮影して認識。認識にどの画像処理方式を使用するかは検討段階。
ロータリー
左右に壁がないことを認識後柱まで前進し、90°回転。壁に当たらないように周回し、出口まで進む。
小部屋
左手法によって脱出。出口を予測するシステムを後付するかもしれない。
鍵
?
十字路
定めた順番通りに画像を認識していき道を選ぶ。その時の選択を記憶し二回目の競技に役立てる。
T字路
画像を認識して道を選ぶ。その時の選択を記憶し二回目の競技に役立てる。
シーソー
?
- 1.4 フローチャート
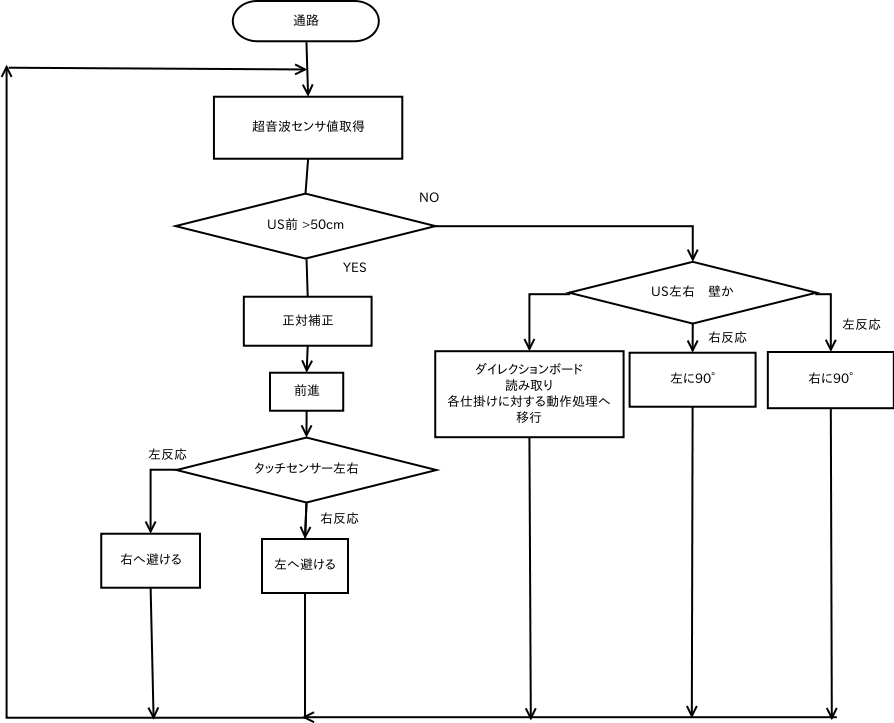
通路
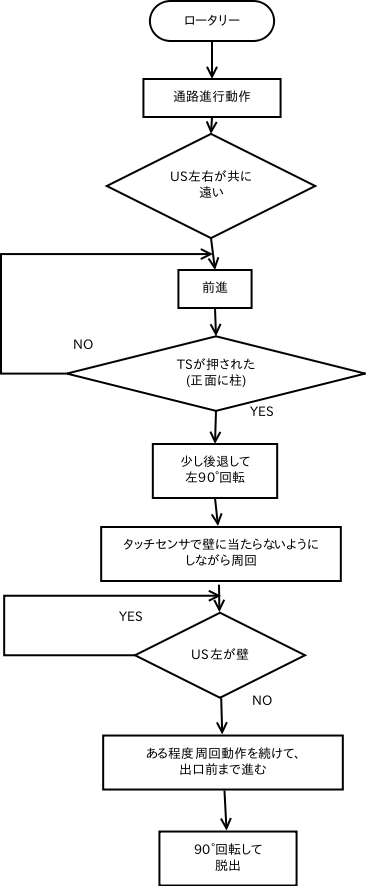
ロータリー
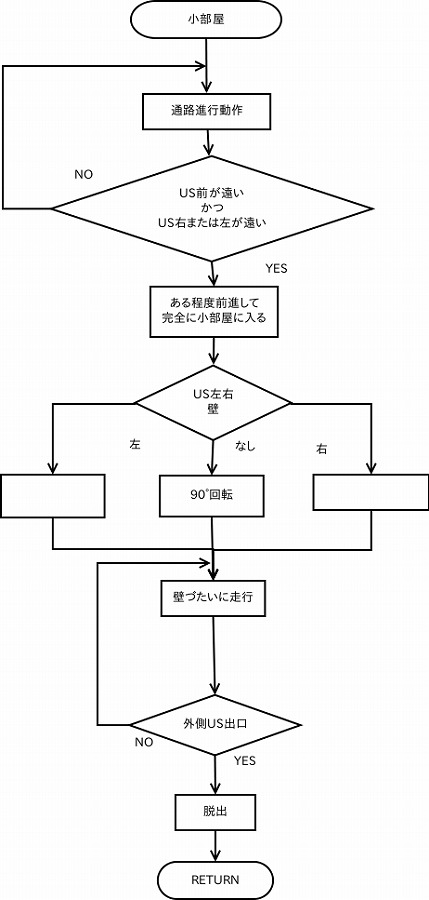
小部屋
- 2. 標準機との相違
- 2.1 ハードウェア
- 超音波センサ 4つ、前2つ右1つ左1つ
- 白線センサ 1つ、下段シャーシの下部に設置
- 赤外線センサ 未定
- タッチセンサ 4つ、前後左右各1
- 2.11 小型化
- MIRSを全体的に小さくし、それにより安定性の向上を図る。
- 2.12 下段シャーシの切断
- 下段シャーシを切断し蝶番をつけることにより、シーソーやステップなどの段差の影響を受けにくくする。
- 2.13 超音波センサ
- MIRS前方の左右に一つずつ超音波センサを設置し各障害の突破に使用する。
- 2.14 タッチセンサ
- 直進に失敗している際の補助としてタッチセンサを用いる。壁に衝突したときにそれを感知し補正する。
- 2.2 ソフトウェア
- 基本的には標準プログラムを解析・最適化して使用することとする。必要なプログラム、欲しいと思ったプログラムがあれば随時追加する。つまりほとんど未定。
関連文書
沼津工業高等専門学校 電子制御工学科